Week 1 Intro & ResponsibleAI
1. 需要与人类合作或协作(That must cooperate or collaborate with humans.)
- 智能交互系统 不能独立存在,而是要能够与人类用户进行交互,帮助他们完成任务或提供有价值的信息。
2. 这种合作需要 交互(interaction)和智能(intelligence)
- 交互(Interaction):系统应该能够与用户进行多层次的交互,比如响应指令、提供反馈、进行对话等。
- 智能(Intelligence):系统应该具备 学习、推理、预测、决策 等能力,使其能更有效地辅助用户。
3. 交互可以发生在多个时间尺度(That interaction can occur on multiple time scales)
- 感知-行动(Perception-Action):系统可以实时响应用户输入(如语音助手、手势控制)。
- 对话交互(Conversational):交互可以是短期的,例如人与聊天机器人之间的对话。
- 决策(Decision):系统可能涉及更长时间尺度的推理,例如 个性化推荐 或 长期策略优化。
4. 智能(Intelligence)是指利用可用数据进行学习和理性决策的能力
- 这里的 智能 体现在:
- 学习(Learning):从用户数据、环境反馈中学习模式和偏好。
- 理性决策(Rational Choice):基于学习结果做出符合目标的决策,而不是随机响应。
5. 智能需要使用预测性、解释性和上下文一致的模型
- 预测性(Predictive):模型需要能够预测 用户行为,如推荐系统预测用户喜好。
- 解释性(Explanatory):系统的决策需要可解释,例如提供推荐的理由,以提高用户信任度。
- 一致性(Consistent Across Contexts):智能系统在不同场景下(如 不同设备、环境、任务)仍然能保持稳定表现。
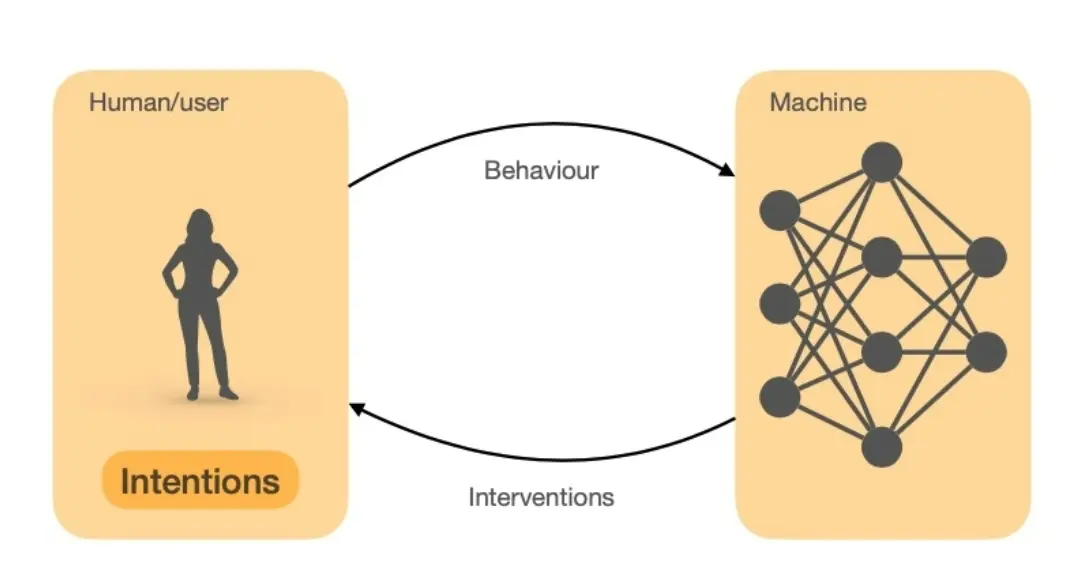
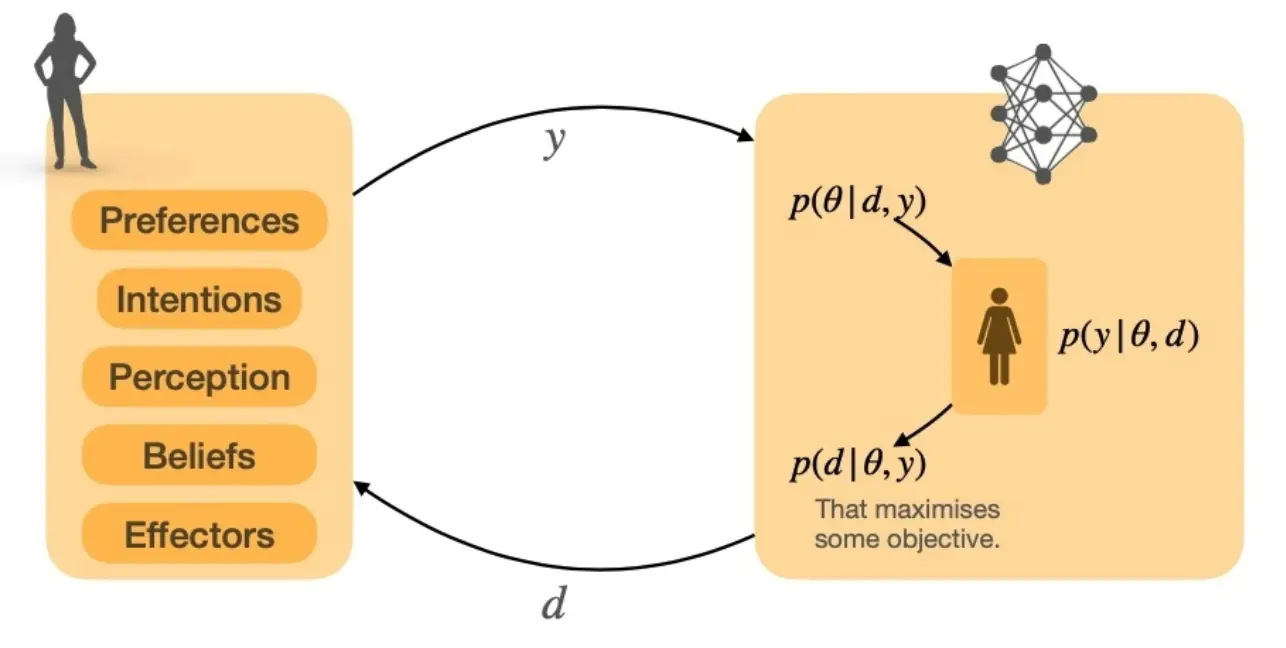
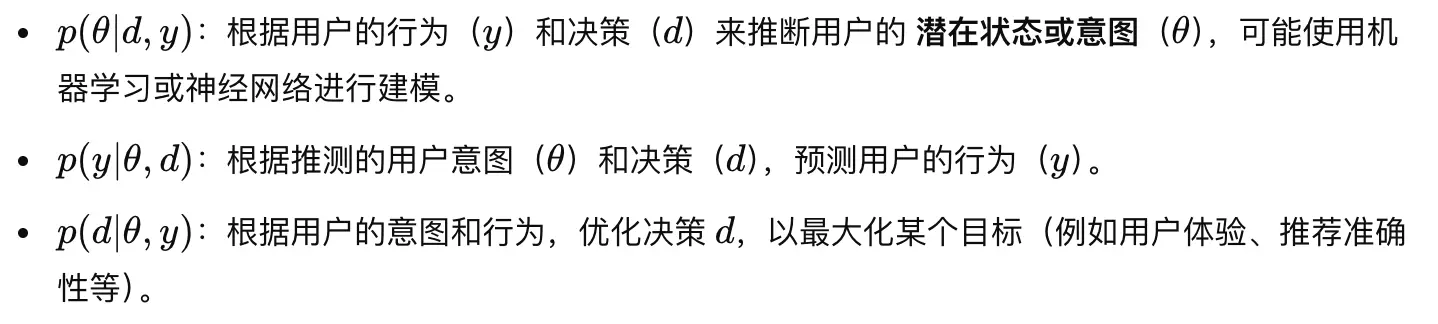
6. 智能交互系统需要通过行为推断(Inferring)用户的偏好和意图
- 推断(Inferring):系统不能只是被动地等待指令,而是要主动推测 用户的需求和意图。
- 从行为中学习(Learning from Behaviour):通过分析用户的鼠标点击、浏览记录、语音输入、眼动轨迹等,系统可以理解用户的需求并进行优化。
Responsible AI
Bias
LLM从text中学习到含义,依赖于大规模文本数据进行训练,因此它们会反映和学习这些数据的结构、模式和隐藏的偏见。
- 许多文本数据会编码社会文化规范,比如性别歧视,社会阶层歧视,种族偏见等等。
- 话语主体可能被一部分人占领,某些观点和信息被过度代表,而其他观点被低估或忽视。
例子:德州奥斯汀以前用Ai筛选PhD申请,但由于其有bias,最终被放弃。
如何de-bias?
Hallucinations
LLM是有幻觉的。福布斯新闻曾经报道,一名律师 在诉讼中使用 ChatGPT 来准备法律文件。ChatGPT 编造了不存在的法庭案例,律师没有核实,直接提交到了法庭。
如何去幻觉?可以用RAG。 让 LLM 结合 传统的信息检索技术(如数据库、文档库、知识图谱),确保生成的文本基于真实的外部信息。
Intellectual Property
- Jane Friedman 发现 Amazon 上有多本署名她名字的书籍,但她本人从未写过这些书。
- 这些书可能是由 AI 生成,并冒用了她的名字,企图利用她的声誉进行销售。
- 这标志着 AI 生成内容被用于身份盗窃和知识产权侵权的新案例。
Adversarial Attacks
大多数LLM都通过以下的手段来规避坏的行为:
- RLHF
- 内容过滤 然而,有一些人可以用prompt来让llm jailbreak
- 用户利用复杂的文本模式(如特殊符号、混淆句子结构)绕过 LLM 的安全检测,使其提供 如何制造炸弹的详细指南。 黑客和ai开发者在进行军备竞赛,黑客不断绕过LLM的安全机制,利用ai生成有害信息,而ai开发者需要持续改进安全性。
如何做得更好?
审计 透明设计 重新思考溯源、知识和智能的问题 水印 新的内容商业模式 - 谁能拥有你的数据? 让 内容创作者和出版商 参与到 AI 生态系统中,而不是被 AI 替代 用户教育
Week 2 Cooperation & Game Theory
例子 Cooperative Lane Changing Assistant
- Zimmermann 等人(2018) 使用 博弈论(game theory) 来奖励那些让其他车辆并道的司机。
- 在 模拟实验(simulator study) 中,该辅助系统记录了哪些司机愿意让其他车辆进入车道。
- 该系统向其他司机提供这些记录,以帮助他们进行决策。
- 司机可以选择优先帮助那些过去曾经帮助过他人的司机。
例子 Tragedy of the Commons
- 每位农民都在说 “I want another cow!”(我想要再多一头牛!)。
- 牧场上的牛正在吃草,暗示着草地是有限的资源。
- 如果每个农民都只考虑自己的利益,不断增加牛的数量,最终牧场的草地将被过度放牧,导致整个生态系统崩溃。
关键概念
- 纯粹的自我利益 vs. 利他主义(Pure self-interest versus altruism)
- 延迟自我利益(Deferred self-interest)
- 亲属、群体和邻里利益(Kin, group and neighbour interest)
- 合作 vs. 背叛(Cooperation versus defection)
- 公地悲剧(Tragedy of the commons)
- 非零和博弈(Non zero-sum games)
Cooperative AI
研究如何让人工智能帮助人类实现共同福利(joint welfare)。 合作型 AI 旨在研究如何让 AI 在人与人、AI 与 AI 之间促进合作,而不仅仅是独立决策。
它不同于对齐 AI、可信 AI 或有益 AI,因为它关注如何优化集体利益,而不是仅仅保证 AI 符合某一方的目标。对于解决全球性问题(如环境保护、经济公平、国际协调) 具有重要意义。
- 对齐 AI(Aligned AI):
- 目标是让 AI 符合人类的目标和价值观,防止 AI 偏离预期行为。
- 重点在于控制和约束 AI,避免它带来负面影响。
- 可信 AI(Trustworthy AI):
- 关注安全性、可解释性、公平性和隐私保护。
- 目标是让 AI 的决策过程透明、可靠且可验证。
- 有益 AI(Beneficial AI):
- 关注AI 的长期影响,确保 AI 整体上对社会有益,而不仅仅是执行任务。
- 例如,OpenAI 的目标是开发 “造福全人类的 AI”。
合作的演化过程:
- 人类之间的合作(最基本的形式)。
- 借助工具促进合作(技术增强合作能力)。
- 人与 AI 之间的合作(AI 作为协作伙伴)。
- 社会级别的合作(组织和社会如何整合 AI 进行大规模协作)。
Game Theory
博弈论的基础假设如下:
- 决策者理性地 追求明确的目标(如偏好、奖励和效用)。
- 对于一件事,有一个行动集合A(如增税等),结果集合C(如短期财政收入增加,长期投资减少),以及结果函数g(社会运行机理),将A映射到C。每个决策者都会有自己的偏好关系,决策者会考虑g(A)是否达到了自己想要的偏好关系。
- 决策者会考虑 其他决策者的行为(即他们的知识和预期)。
- 换句话说,决策者会战略性地思考,以最大化自身效用。
- 博弈论并不是传统意义上的“游戏”,而是一种数学方法,用于研究合作和非合作行为的决策过程。
博弈论可以用于存在不确定性的情况中,一般不确定性来自于以下几个方面:
- 对环境的客观了解不确定
- 对博弈中的事件信息不完全
- 对其他玩家的行动不确定
- 对其他玩家的推理方式不确定 而每个人都有一个Subjective Expected Utility,SEU,即主观期望效用,决策者会根据自己对不确定性事件的主观概率估计来做出选择,而不仅仅是客观数据。这意味着即使没有确切信息,玩家仍然可以基于自身的信念和经验进行策略决策。
例:囚徒困境
你和另一个人已经被判2年,但其实你们两个还犯了另一个案子。
- 如果你认罪,对方不认罪
- 你只需要服刑1年,你作为污点证人,对方判10年
- 你不认罪,对方认罪
- 你判10年,对方判1年
- 你们都认罪
- 都只判3年
- 都不认罪
- 只需要服刑原来的2年
这是Game Matrix,或者叫Payoff Matrix 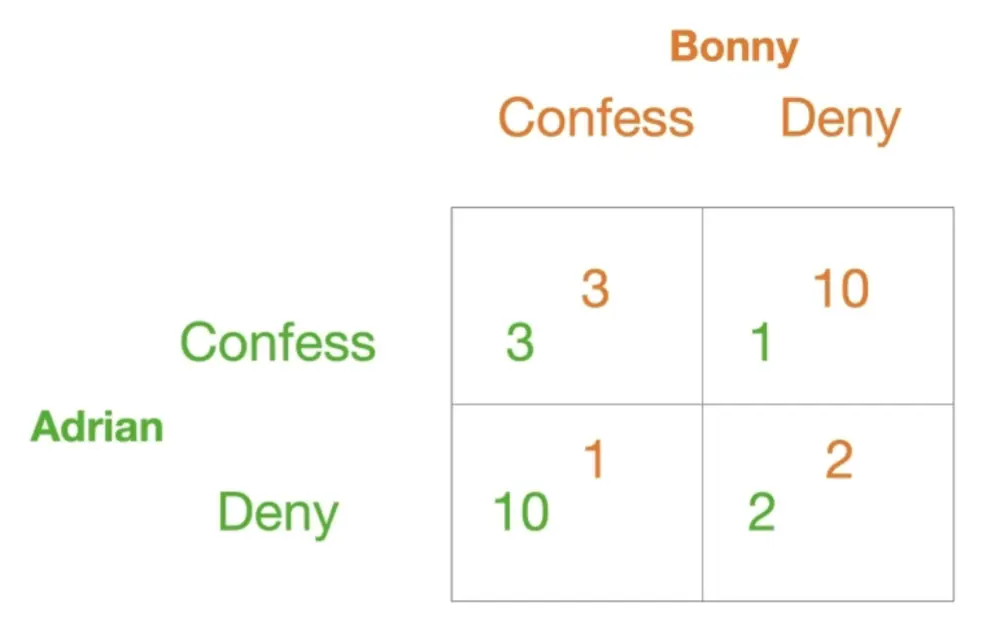 可以看到,如果B认罪,那么A认罪最佳,B不认罪,A也是认罪最佳,对B也是一样。也就是说,对A和B来说,认罪都是理性选择。 那么这个game的纳什均衡就是双方都认罪。但是,其实最佳集体策略是双方都否认。
可以看到,如果B认罪,那么A认罪最佳,B不认罪,A也是认罪最佳,对B也是一样。也就是说,对A和B来说,认罪都是理性选择。 那么这个game的纳什均衡就是双方都认罪。但是,其实最佳集体策略是双方都否认。
如果在某个策略组合下,没有玩家可以通过单方面改变自己的策略来获得更高收益,那么这个策略组合就是一个纳什均衡
例:协调博弈
有两个投资项目,A和B,如果公司X和公司Y都做A投资,那么双方都可以收获10,如果公司X和公司Y都做B投资,那么双方都可以收获5。但如果双方投资了不同项目,则无收益  这里,纳什均衡为AA或者BB。 分析:如果对方选A,那么我无法做出选A之外的其他更好决定,我选A,对方无法做出选A以外的更好决策,所以AA为纳什均衡,对BB也一样。如果是AB,那么单方面改选可以收获更多,所以不是纳什均衡。
这里,纳什均衡为AA或者BB。 分析:如果对方选A,那么我无法做出选A之外的其他更好决定,我选A,对方无法做出选A以外的更好决策,所以AA为纳什均衡,对BB也一样。如果是AB,那么单方面改选可以收获更多,所以不是纳什均衡。
我个人感觉纳什均衡有点像局部最优。
例:懦夫博弈(A Game of Chicken)
- 两名玩家 从道路的相对两端向彼此驶来。
- 目标 是比对方更晚转向。
- 如果一名玩家转向,他们被认为是“懦夫”("chicken")。
- 如果双方都不转向,他们会相撞。
Payoff Matrix  这个里面的纳什均衡是1 -1和-1 1 对于左下角,当我就是要直行的话,对方直行会从-1变成-100,所以对方无法单方面作出最好决策;当对方一定要转向的时候,我如果转向,收益就从1变成0了,所以我不转,所以是纳什均衡。
这个里面的纳什均衡是1 -1和-1 1 对于左下角,当我就是要直行的话,对方直行会从-1变成-100,所以对方无法单方面作出最好决策;当对方一定要转向的时候,我如果转向,收益就从1变成0了,所以我不转,所以是纳什均衡。
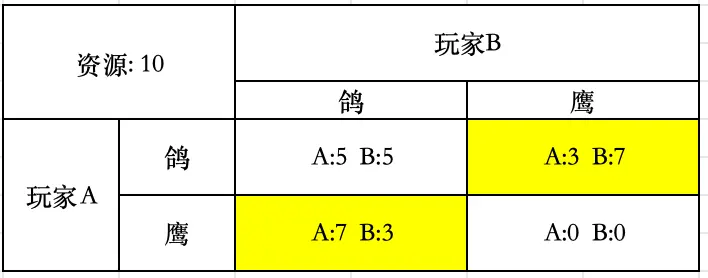
例:鹰-鸽博弈(Hawk/Dove Game)
- 在鹰-鸽博弈中,两个玩家竞争有限的资源。
- 如果双方都选择“鸽”策略,那么他们平分资源。
- 竞争是有代价的,它消耗能量,并且不一定能成功。
- 如果双方都选择“鹰”策略,那么竞争的能量消耗将抵消所有可能获得的资源收益。
- 如果一个玩家选择“鹰”策略,而另一个玩家选择“鸽”策略,那么 **“鹰”玩家获得大部分资源,而“鸽”玩家仅获得一小部分资源 **。
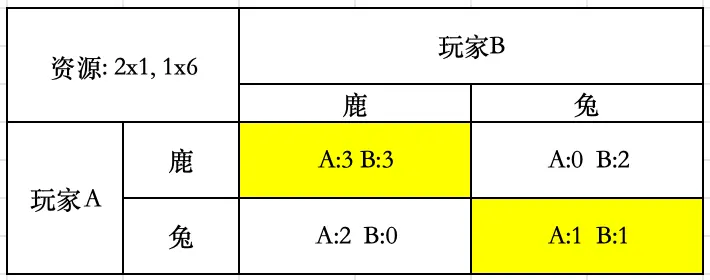
例:猎鹿博弈(Stag Hunt)
两个猎人外出捕猎晚餐。
- 在狩猎范围内有两只兔子和一只鹿。
- 每个猎人只能携带捕猎特定猎物的装备,即他们必须决定是去猎兔子还是猎鹿。
- 鹿的肉比两只兔子的总和还要多,但是必须两个猎人合作才能成功捕获鹿。
- 如果选择猎兔子,每个猎人都可以单独行动并成功捕获猎物。
练习:自动驾驶汽车博弈
- 在未来,自动驾驶汽车(AVs) 预计需要最大限度地保护行人——当存在碰撞危险时,它们应立即停车并保持高度可靠性。
- 然而,如果AV每次遇到行人阻挡都会停车,那么行人可能会习得他们始终具有优先权,导致AV几乎无法正常行驶。
- 用博弈论建模此情境,并推导其纳什均衡。
- 提出一个解决方案,使AV能够正常行驶,同时增强对行人的保护。
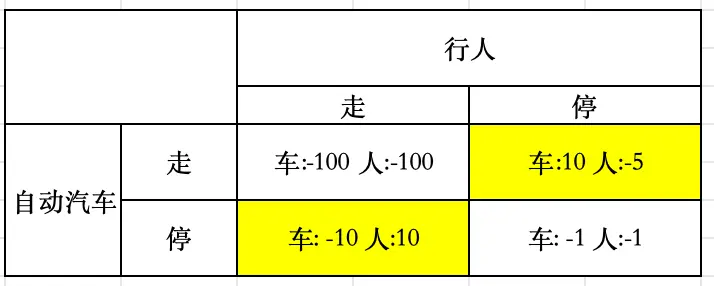 纳什均衡已用黄色标出。 解决方案:建立通信,车向人发送信号。
纳什均衡已用黄色标出。 解决方案:建立通信,车向人发送信号。
练习:性别战(The battle of the sexes)
了一对情侣(Alice 和 Bob)要决定晚上去哪儿约会的场景:
- Alice 想去看 芭蕾舞(Ballet)。
- Bob 想去看 拳击比赛(Boxing)。
- 但 他们都更希望在一起,而不是各自单独去。

总结(Summary)
- 智能交互系统 需要与人类合作,同时也需要促进人类与机器的沟通,尤其是在由人类和机器共同组成的混合系统中。
- 合作可以提高交互效率,例如在半自动驾驶车辆中的应用。
- 但合作是困难的,因为有时背叛(不合作)可能带来更大的短期利益。
- 博弈论提供了一种框架,用于预测人类和机器何时会合作,何时会选择背叛,这取决于任务的激励结构。
- 现实世界中的问题可以使用博弈论建模,并且可以通过合理的激励机制来促进合作。
Week 3 Cooperation
阿克塞尔罗德的计算机锦标赛
著名的博弈论实验,他邀请来自不同学科的研究者提交计算机程序,以竞争“囚徒困境”博弈的最佳策略。 友好策略(Nice Strategies,粉色区域)
- 这些策略具有 合作性(不主动背叛),并且整体得分很高。
- “以牙还牙”(Tit for Tat)策略 由 Anatol Rapoport 提交,在比赛中表现最佳。
- 这些策略的共同特征:
- 从不先背叛(永远不会主动欺骗对方)
- 回报合作(如果对手合作,它们也会合作)
- 简单而有效(它们并不复杂,但表现优越) 得分情况:
- 这些策略得分都接近600,意味着它们在比赛中表现非常稳定,且能在合作中获得高分。
造王者(Kingmakers,黄色区域)
- 这些策略(Graaskamp 和 Downing)的特点是它们可能不会自己赢得比赛,但它们的策略会影响其他策略的排名。
- 它们的得分变化较大,表明它们可能采取了不稳定或更具攻击性的策略,影响了博弈的平衡。 得分情况:
- 这些策略的得分波动很大,比如 Downing 对不同策略的得分从202到625不等,表明它们对不同对手采取了不同的策略。
随机策略(Random)
- 最后一名(Random) 是完全随机的策略,得分最低(仅442分),因为随机策略不能形成稳定的合作,容易被其他策略剥削。
Axelrod的第二次实验
- 这次实验是对第一次比赛的后续测试,参赛者已经知道第一轮的结果。目标是测试改进的策略能否战胜之前的赢家(如 Tit-for-Tat)。
- 参赛者的程序被随机匹配,相互竞争。
- 比赛的回合次数是随机的,平均大约200轮。
- 原因:
- 这一设计使得策略无法依赖固定轮数(比如如果知道比赛是100轮,就可以在最后几轮背叛)。
- 逼近现实:现实世界中的合作往往没有明确的终点,所以策略应该适用于不确定的环境。 结果是Tit-for-Tat 仍然获胜。
- 原因:
Tit-for-Tat告诉我们什么?
- 要友善!(Be Nice!) - 先从合作开始。
- 要不容忍!(Be intolerant!) - 如果对方无故背叛,立即进行背叛——展现惩罚的意愿。
- 要宽容!(Be forgiving!) - 在对方背叛之后(惩罚一次后)重新合作。
Evolution of Cooperation(合作的演化)
内容解析
- 假设有一组智能体,每个都有3步记忆。
- 囚徒困境有4种可能的结果,因此有 4×4×4=64 4×4=64 种不同的历史状态。
- 一个策略可以被表示为64维向量,其中每个元素对应一个动作(合作或背叛)。
- 进化过程:
- 初始时,有20个个体,每个采用随机策略。
- 这些策略相互博弈多轮,计算平均得分。
- 淘汰最差的10个策略。
- 从前10个策略中交叉“繁殖”,生成新的策略。
- 重复该过程,模拟策略的进化。
结论
- 通过不断淘汰低效策略并让高得分策略“繁殖”,可以观察到合作策略的演化。
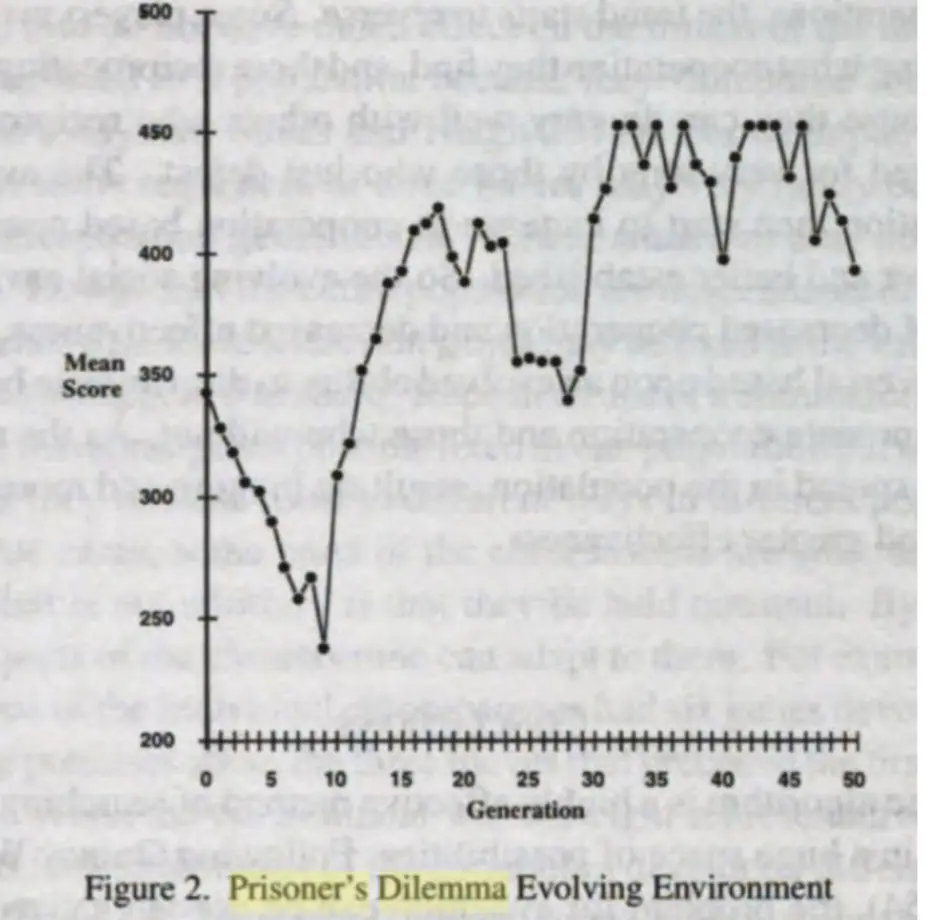
- 初始阶段(前10代):平均得分下降
- 可能由于最初的策略大多是随机的,导致合作较少,整体收益低。
- 也可能是许多欺骗性策略占优,使得个体间的信任崩溃,收益减少。
- 10代后:平均得分开始上升
- 说明合作策略开始出现,并在进化过程中逐渐占据主导。
- 由于合作可以提高长期收益,这些策略获得更高得分,并在选择过程中存活下来。
- 25代左右:得分短暂下降
- 可能是由于新的、较具欺骗性的策略进入种群,导致合作再次受到挑战。
- 但是这些策略可能无法长久存活,因为如果所有个体都开始背叛,整体收益会下降。
- 25代后:平均得分明显上升并趋于稳定
- 合作策略占据主导地位,群体整体得分上升,表明合作是长期博弈中的优胜策略。
- 这一趋势符合**“以牙还牙”(Tit-for-Tat)等合作策略的演化优势**。
Multi-agent Reinforcement Learning(多智能体强化学习)
内容解析
- 作为进化算法的替代方法,可以使用**强化学习(RL)**来学习合作策略。
- Sandholm 和 Crites(1996)研究
- 证明强化学习智能体可以学会合作。
- 当强化学习智能体与固定的“以牙还牙”(Tit-for-Tat, T4T)策略对战时,T4T会成为学习到的最优策略。
- 当强化学习智能体彼此对战时,结果更加复杂,说明博弈环境会影响学习到的策略。
结论
- 强化学习可以自动发现合作策略,但其表现取决于对手的行为模式。
Further Discoveries(进一步发现)
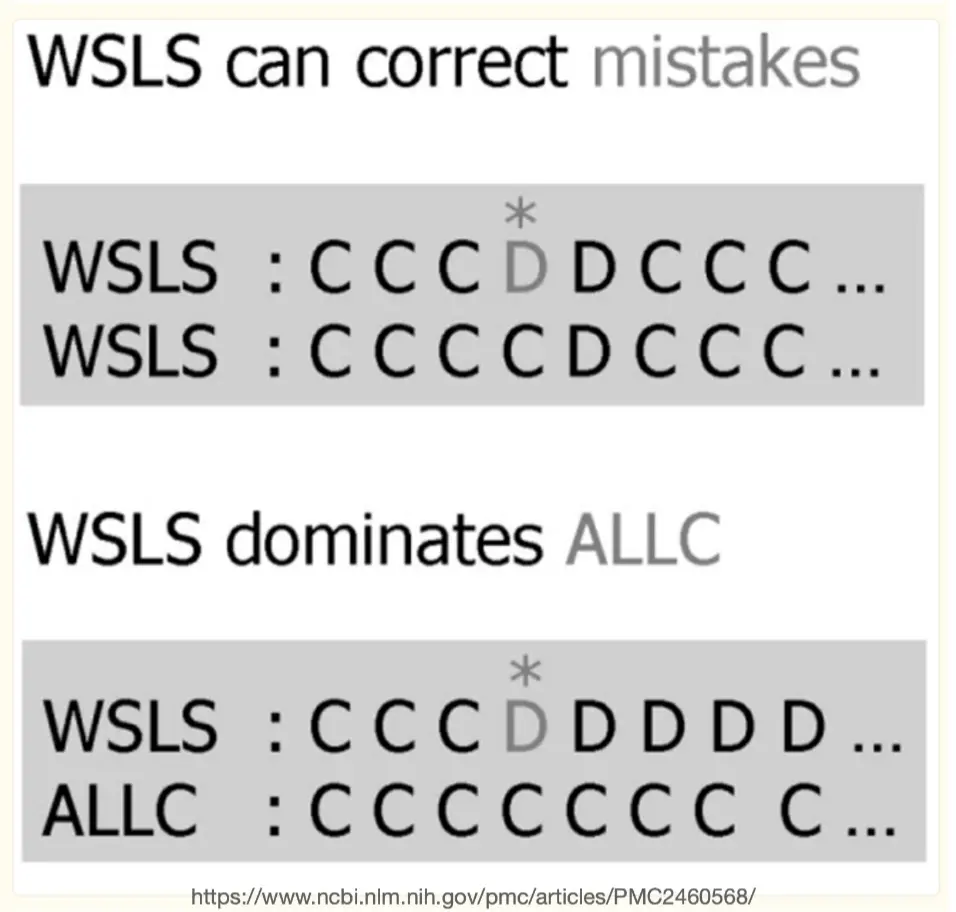
Win-Stay Lose-Shift(WSLS)策略
- Nowak & Sigmund (1993) 提出了 WSLS(赢留输换) 策略:
- 比以牙还牙更具鲁棒性,能更好地应对对手的意外背叛。
- 能够利用纯合作策略(如 ALLC:始终合作),在某些情况下表现更优。
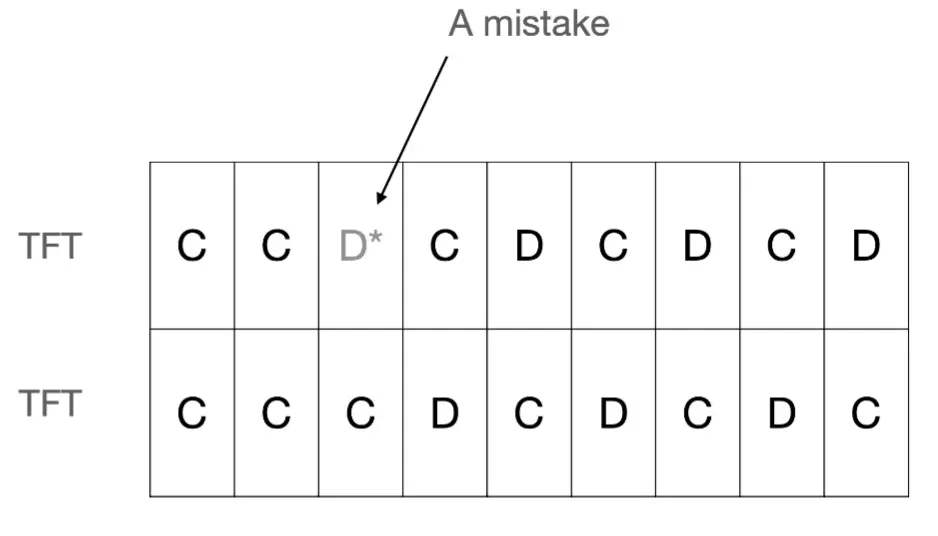
如果在 Tit-for-Tat(TFT)对局中发生一次意外背叛(误操作),该策略会导致:
- D(背叛)→ C(合作) 交替模式,使双方都损失较多分数。
- 这可能导致长期的恶性循环,使得合作关系难以恢复。
- WSLS 赢留输换策略:赢是指你单方面背叛或者双合作。
- 如果上轮获胜(双赢或成功欺骗),继续执行相同策略。
- 如果上轮失败(被欺骗或双方背叛),改变策略。
- 优势
- 能够恢复合作,不会陷入持续背叛的循环。
- 在对战 ALLC(始终合作)时表现更优,可以在适当时机利用对方。带星号是指错误的换了。
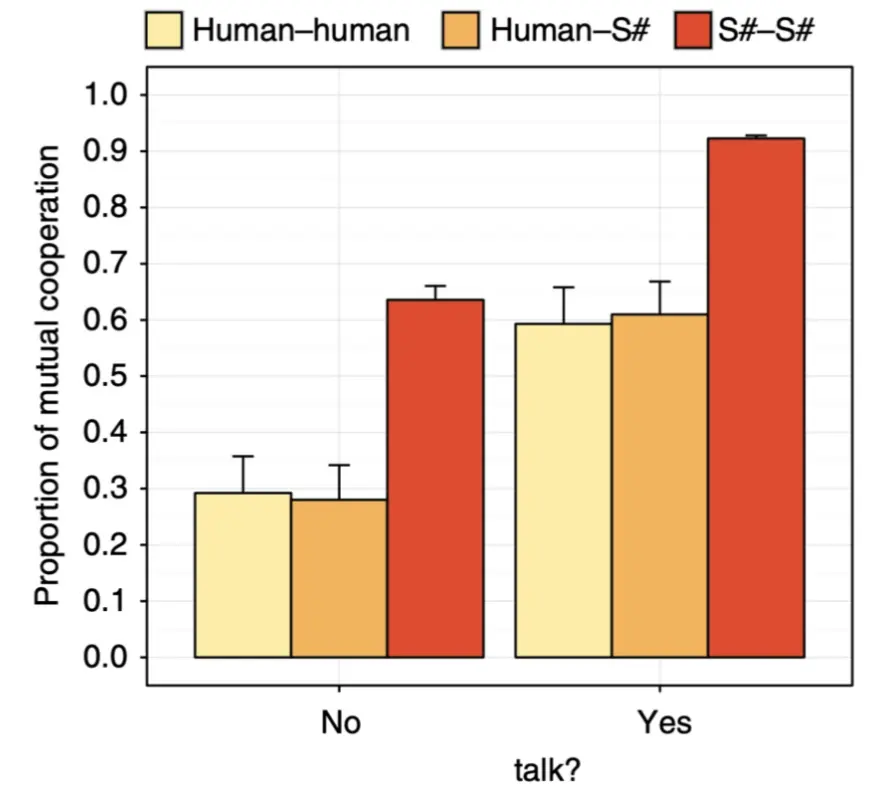
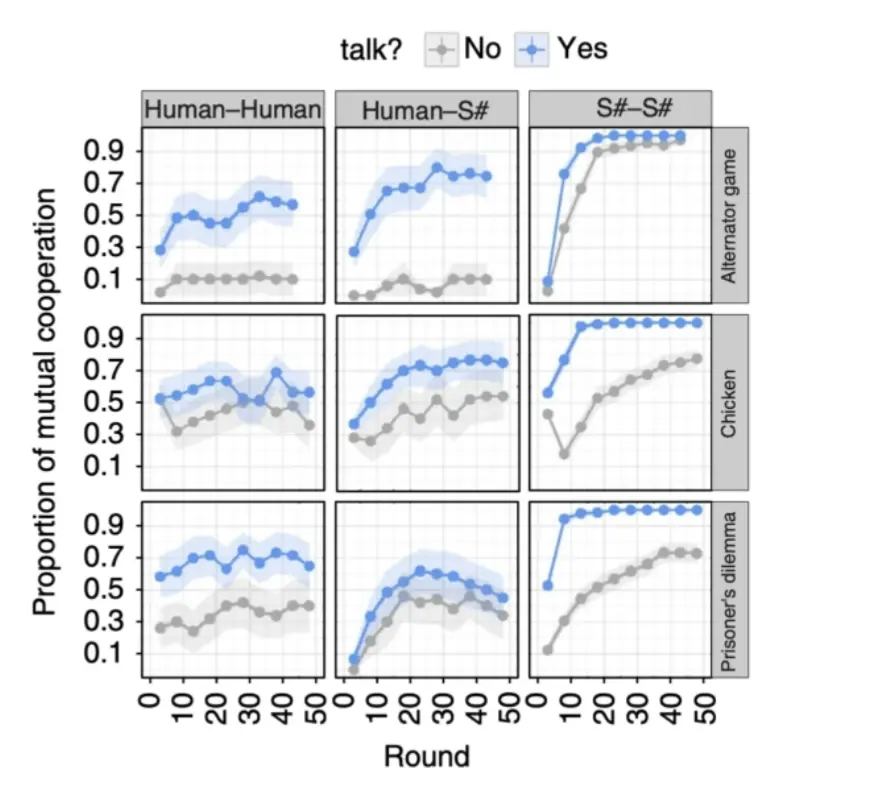
如果多轮囚徒困境可以说话
- 合作需要沟通
- 合作(Cooperation) 受信号传递(Signaling) 影响,例如语言、承诺或威胁。
- 在博弈论中,沟通可以帮助智能体建立信任、制定策略并维持合作。
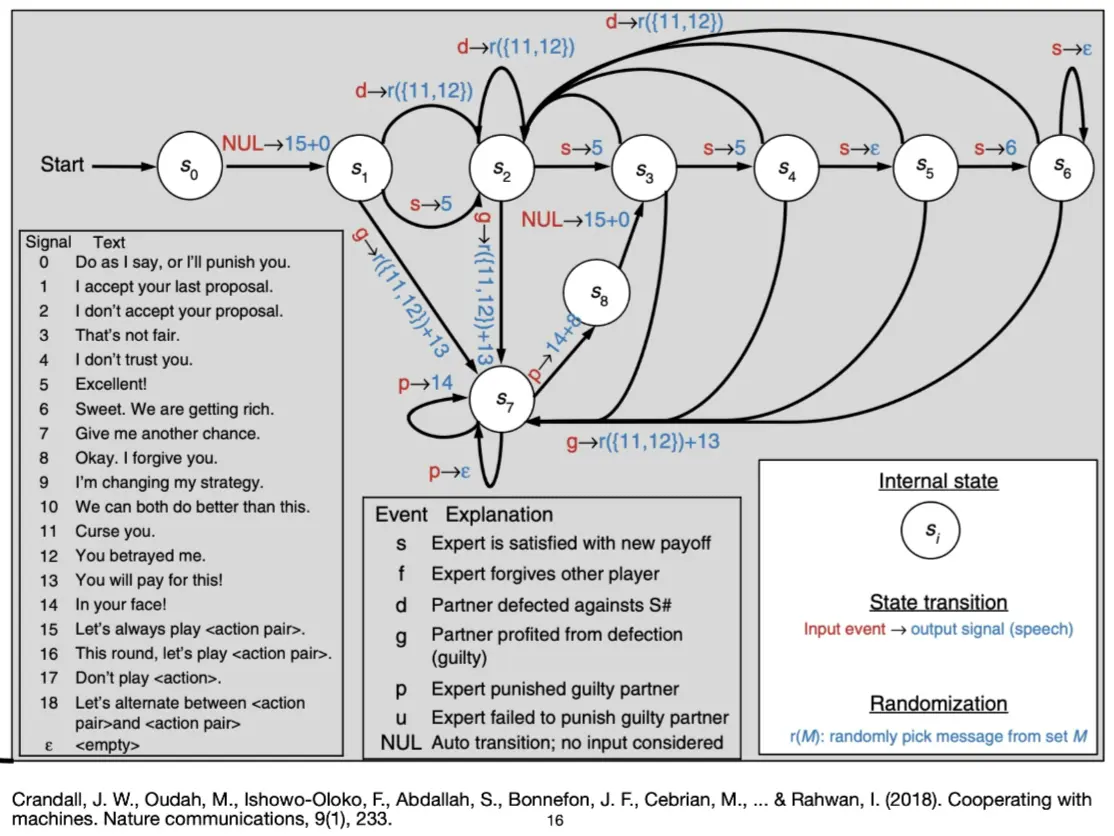
- S# 算法
- 由 Crandall 等人提出,结合强化学习(Reinforcement Learning, RL) 和 信号机制。
- 能够与人类和其他算法合作,并达到与人类相当的合作水平。
- 适用于多种博弈环境
- S# 能够在两人重复随机博弈(例如囚徒困境)中实现高效合作。
- S# 能够在两人重复随机博弈(例如囚徒困境)中实现高效合作。
设计一个IIS的在线购物平台
1️⃣ 信用评分 & 信誉推荐
- 计算信誉评分 (0-100),高信誉用户在市场上有更大优势。
- 信誉低的用户会被系统限制(如预付款要求、提高押金等)。
2️⃣ AI 信誉检测
- 采用机器学习模型检测欺诈模式,例如:
- 异常评分(短时间内大量负评)。
- 短时间创建大量虚假账户。
- 交易模式异常(某些账户专门给另一个账户打高分)。
3️⃣ 交易智能匹配
- AI 依据信誉评分匹配买家和卖家,优先推荐高信誉交易者进行匹配。
- 如果新用户信誉不够,系统可能会要求 更安全的交易方式(如托管支付)。
直接互惠(Direct Reciprocity)和间接互惠 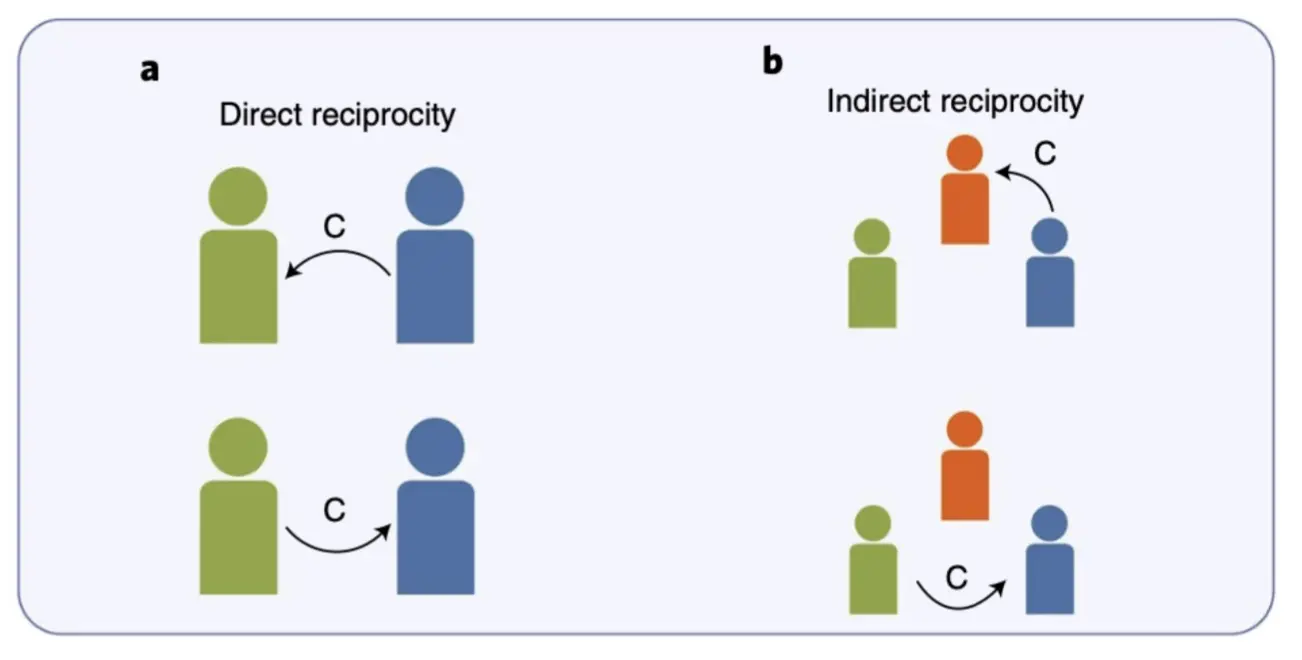 直接互惠:A 帮助 B,B 未来回报 A。 间接互惠:A 帮助 B,B 可能不会直接回报 A,但 C(第三方)会因为 A 的善行而帮助 A。
直接互惠:A 帮助 B,B 未来回报 A。 间接互惠:A 帮助 B,B 可能不会直接回报 A,但 C(第三方)会因为 A 的善行而帮助 A。
- 依赖于声誉(Reputation) 系统,第三方观察 A 的行为后决定是否合作。
声誉如何促进间接互惠? 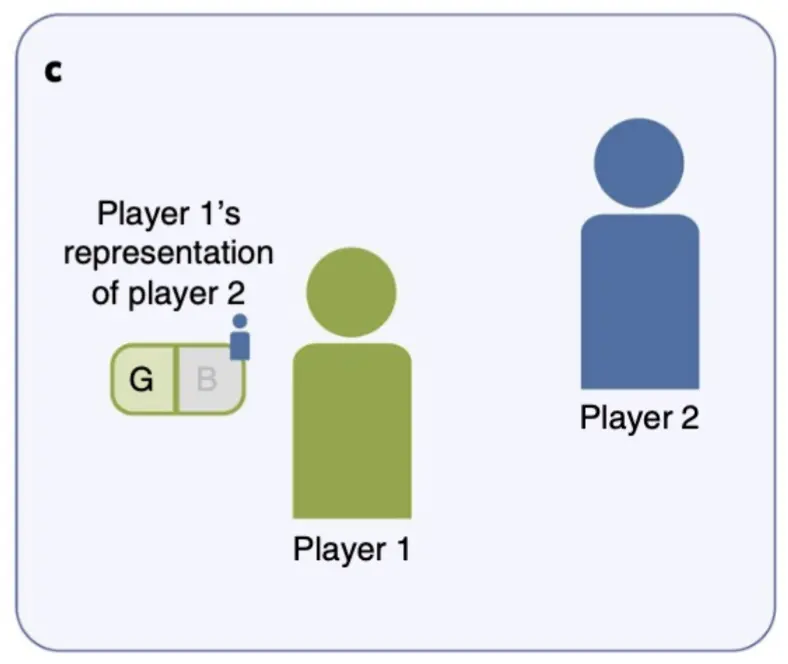
- 绿色玩家(Player 1)不会直接与蓝色玩家(Player 2)互动,但他有 Player 2 的声誉信息。
- 绿色玩家基于历史记录将 Player 2 归类为“好(G)”或“坏(B)”。
- 如果 Player 2 的声誉是 G(Good),Player 1 更有可能合作。
在线市场中的声誉
- 在线市场依赖声誉。
- 通过反馈建立声誉。
- 在线市场比传统市场更容易出现欺诈问题。
- 在线和传统市场的参与者以不同的方式进行沟通。
- 沟通模式是否对市场中的信任程度至关重要存在争议。
- 市场中信息传播方式的差异可能会不同程度地影响信任和合作意愿。
买家-卖家决策树
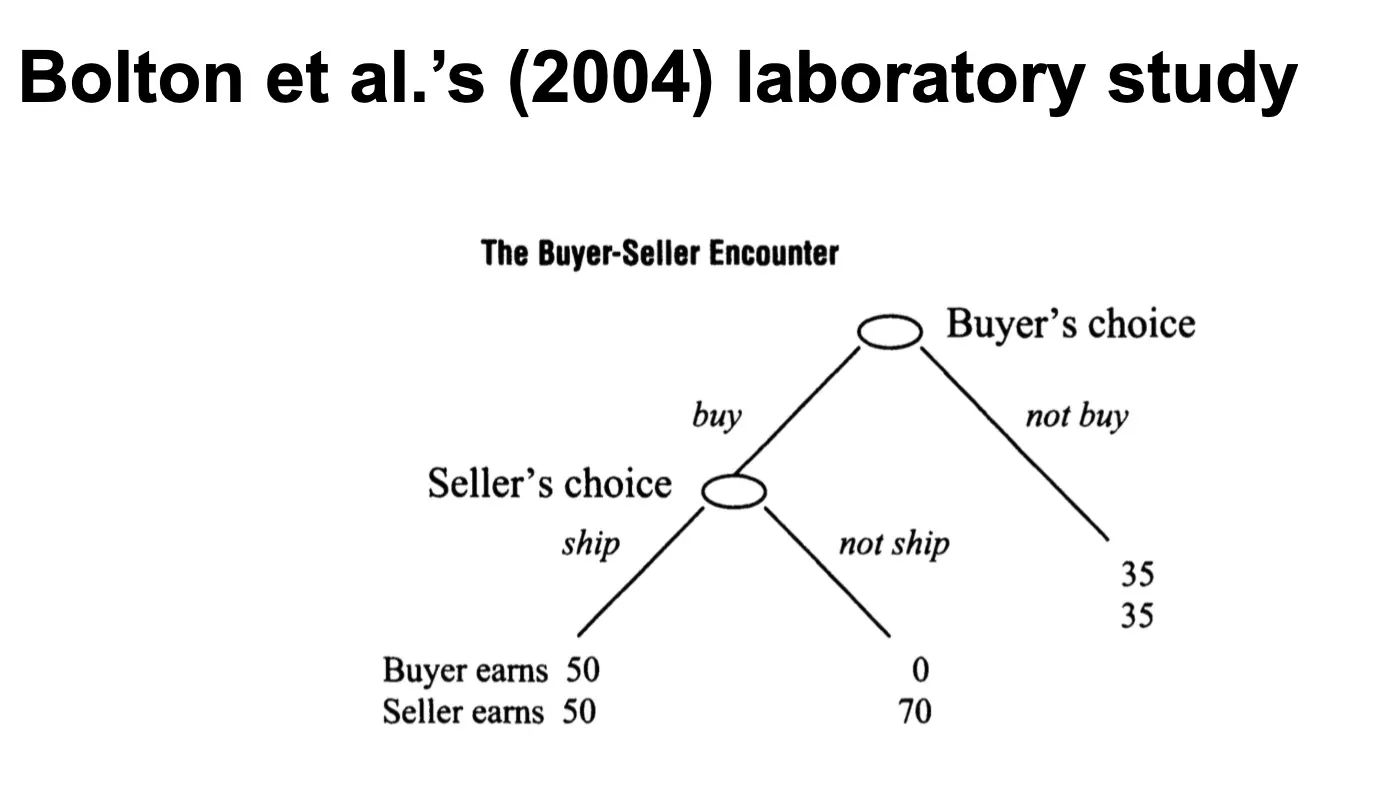 买家不买,那么买家本身有35块钱,卖家35块钱。 如果买家买了,商家发货了,买家拿到货物之后主观认为其价值为50,所以付了50,卖家也得到50 如果买家买了,卖家没发货,那么卖家把买家的钱拿了,变成70
买家不买,那么买家本身有35块钱,卖家35块钱。 如果买家买了,商家发货了,买家拿到货物之后主观认为其价值为50,所以付了50,卖家也得到50 如果买家买了,卖家没发货,那么卖家把买家的钱拿了,变成70
三种市场
陌生人市场(Stranger Market)
个体买家和卖家最多只交易一次,买家无法获得关于卖家交易历史的信息。 在这种市场中,道德风险(moral hazard)极大,因为卖家的行为不会影响未来潜在客户的决策,导致卖家可能存在欺诈的动机。
反馈市场(Feedback Market)
一个在线反馈系统会跟踪卖家在过往交易中的履约情况(如是否发货),并向潜在买家提供这些信息。 这类市场提供了间接互惠(Indirect Reciprocity)机制,使其更符合在线市场的特点,因为买家可以基于卖家的历史表现来决定是否交易。
伙伴市场(Partners Market)
买家和卖家会反复交易,在每一轮都会进行互动。 这种市场提供了直接互惠(Direct Reciprocity)机制,更类似于传统市场,因为长期合作关系可以促使卖家提供更好的服务,以维持客户忠诚度。
信任预测
如果“交易历史”是唯一重要的因素
- 假设买家只关心卖家的历史记录,而不在意自己是否与该卖家有过直接交易。
- 那么:
- 直接互惠(长期合作的买卖关系) 和 间接互惠(基于市场反馈的交易) 应该对市场表现有相同的影响。
- 也就是说,只要卖家有良好历史记录,买家就愿意交易,无论他们是否之前有过合作。
如果“个人交易经验”更重要
- 假设买家更信任自己与卖家的直接交易经验,而不是市场上的反馈信息。
- 那么:
- 直接互惠(长期合作的买卖关系) 会比 间接互惠(市场评价系统) 更有效。
- 也就是说,买家会更信任自己长期合作的卖家,而不是仅仅依赖市场上的评价系统。
真实实验结果
买卖交易决策树:
- 买家首先决定 “买”或“不买”。
- 如果买家选择“买”,卖家可以 选择“发货”或“不发货”:
- 发货:买家和卖家各获得 50 点。
- 不发货:买家获得 0 点,卖家获得 70 点。
- 如果买家选择 不买,买卖双方各获得 35 点。
- 最后一个点数一分钱,可以换成真钱 最后结果:
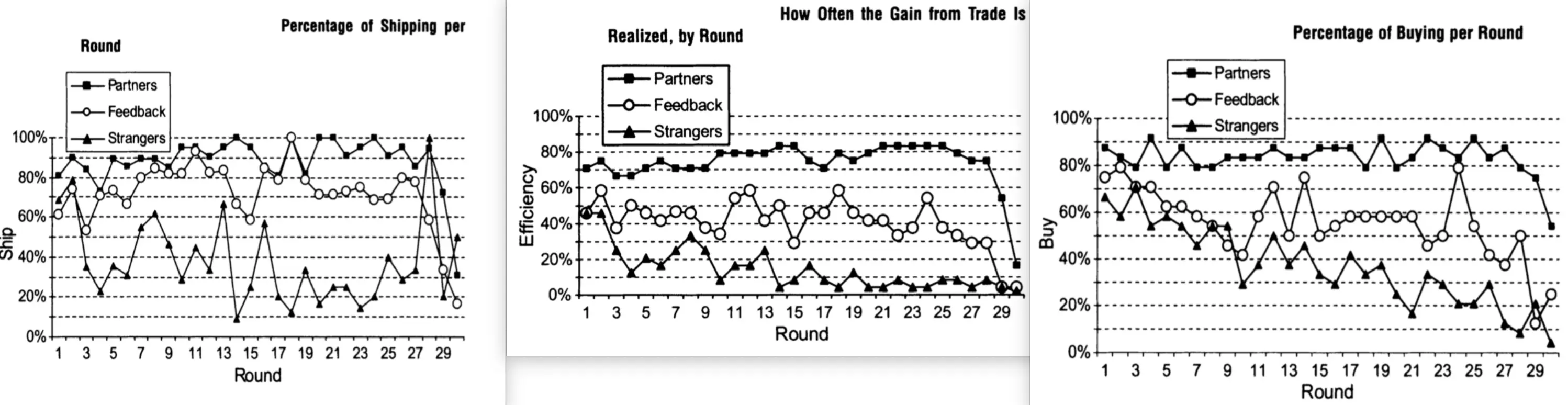 对于第一张图,发货比例图,可以看到,信任建立的难度影响了市场交易的诚信度。在固定买卖关系(Partner)中,卖家更倾向于发货,而在陌生市场(Strangers)中,卖家更容易欺骗买家。
对于第一张图,发货比例图,可以看到,信任建立的难度影响了市场交易的诚信度。在固定买卖关系(Partner)中,卖家更倾向于发货,而在陌生市场(Strangers)中,卖家更容易欺骗买家。
对于第二张图,交易效率,Partner 组效率最高,长期维持在 80% 以上,说明长期合作能促进市场效率。Feedback 组效率中等,但随时间波动下降,意味着反馈系统不能完全消除欺骗。Strangers 组效率最低,长期维持在 20%-40% 之间,甚至在最后几轮接近 0%。
第三张图,每轮买家选择购买的比例。在 Partner 组,买家对卖家更有信任,因此购买率保持高水平。Feedback 组 表明反馈机制在短期内有效,但随着卖家可能欺骗的情况增多,买家购买率下降。Strangers 组 由于交易不稳定,买家对卖家缺乏信任,因此购买率最低,甚至最终趋近于 0%。
通过买家卖家的例子,我们知道了合作的条件
- 理解其他人的激励和策略:了解对方的动机、利益和行为模式,才能做出更明智的决策,避免被骗或做出错误预判。
- 有互动的历史:长期的互动有助于建立信任和稳定的合作关系。
- 互惠(Reciprocity):愿意友善、原谅、并惩罚背叛者:以牙还牙
- 沟通(Communication):如可沟通的多轮囚徒困境。有效的沟通对于建立信任和合作至关重要。
- 通过个人经验获得的信任: 个人经历会影响合作意愿:过去的合作经历(无论正面还是负面)会影响个体对未来合作的预期
- 制度(Institutions):如陌生人市场,反馈市场和伙伴市场。社会结构(social structure) 能促进合作。社会规范(social norms)和法律体系(legal systems) 提供规则,帮助维护合作关系:社会规范:例如诚信、互助文化,使得合作成为一种社会认可的行为。法律体系:提供惩罚机制,防止欺诈行为,提高合作的可靠性。
总结(Summary)
- 智能交互系统需要与人类合作,同时促进人与机器混合群体之间的沟通。
- 合作可以促进更高效的互动,例如在半自动驾驶车辆中。
- 然而,合作是困难的,因为叛变(欺骗、不合作)可能带来短期利益。
- 博弈论(Game Theory) 提供了一个框架,可以用来预测人类和机器在何时会合作,何时会选择背叛,基于任务的激励结构。
- 机器是否合作取决于任务的激励结构,它们会基于成本收益分析做出决策。
- 模拟现实环境需要考虑的不仅仅是激励机制,还要包含沟通方式和社会规范。
- 正如本课程的其他讲座一样,我们只是展示了少数几个可能的合作案例……
Week 3 Human & AI Decision Making
介绍以下概念
- 期望值(Expected Value)
- 期望效用(Expected Utility)
- 递减收益(Diminishing Returns)
- 主观期望效用(Subjective Expected Utility)
- 偏见(Bias)
- 前景理论(Prospect Theory)
Expected Value 客观存在
期望值是客观存在的,然而,人们并不完全是根据期望来做选择的。
例子1:彩票
彩票规则1: 每个彩票5磅,但有1%的机会赢得1000磅 彩票规则2: 每个彩票10磅,每张彩票有50%的机会赢得6磅,40%的机会赢得8磅和10%的机会赢得50磅。 规则1的期望为 1000 x 0.01 = 10, 规则2的期望为 6 x 0.5 + 8 x 0.4 + 50 x 0.1 = 3 + 3.2 + 5 = 11.2。 按照价格差,规则1为10-5 = 5,而规则2为11.2-10 = 1.2,所以如果纯按照期望来看,你会选规则1.但是并不是所有人都会按照期望选。
例子2: 圣彼得堡悖论
玩家支付一定的入场费参与游戏,然后进行一系列的 掷硬币游戏。如果第一次扔,正面赢1磅,结束游戏,背面扔第二次。如果第二次扔,正面赢2磅,结束游戏,背面扔第三次。第三次,正面赢4磅,结束游戏,背面扔第四次... 每后一次的奖励是前一次的double。 所以入场费多少你就应该参加游戏? 如果按照期望计算,是这样的:
所以按照期望来看,你的期望收益无穷,所以你真的就应该付多少都参加游戏?其实人们不是这样的。
那么如何用数学建模人的选择依据?
Expected Utility 部分主观
丹尼尔·伯努利(Daniel Bernoulli) 在 18 世纪提出了解决方案:财富的效用(幸福感)不是线性增长的,而是递减的。人们并不关注金钱的绝对值,而是关注金钱带来的幸福感。赢得**£1 和 £2 之间的幸福感差异大**,但赢得 £1,000,000 和 £1,000,001 的幸福感差异小。所以人的效用应当用 U(x) = log(x)或者指数来衡量。
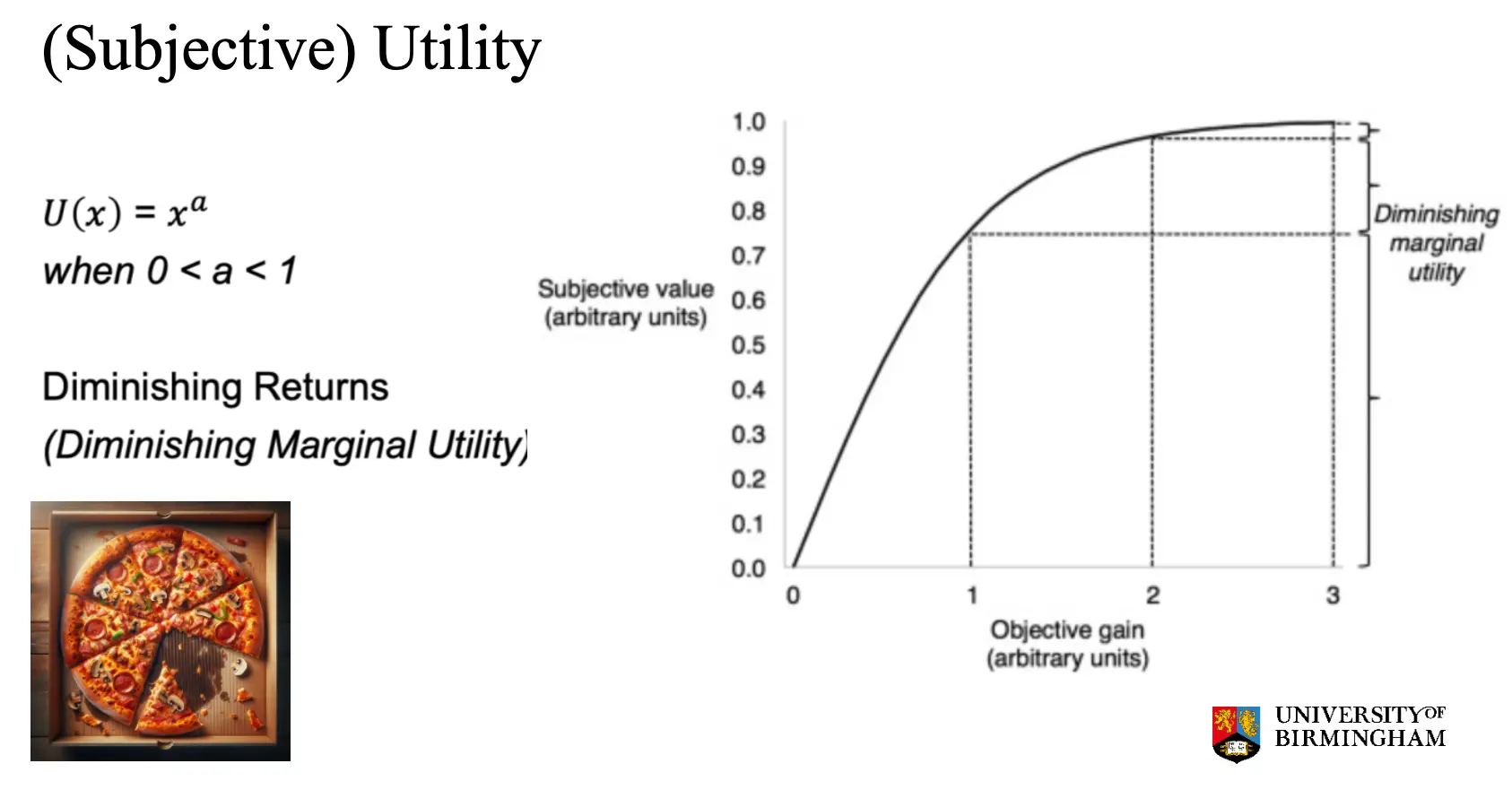 这里也可以看到Diminishing marginal utility, 即为边际效用递减。所以对应人真正的效用,应当是这样的:
这里也可以看到Diminishing marginal utility, 即为边际效用递减。所以对应人真正的效用,应当是这样的:
但其实EU还是有点高看人,因为,人其实是无法客观判断一个事情的概率的,所以出现了Subjective Expected Utility, SEU
Subjective Expected Utility 完全主观
si是决策者对事件 iii 发生概率的主观判断(subjective probability),不同的人对同一事件的概率估计可能不同。所以这里概率和效用均为主观判断。 如何把这些内容理论化?
萨维奇Axioms 期望效用理论(Expected Utility Theory, EUT)
这些公理用于描述理性决策者在面对不确定性时应遵循的基本原则。
- 完备性(Completeness),个体一定能比较A和B中,更喜欢A还是B还是A和B一样。
- 传递性(Transitivity),如果个体偏好 A 胜过 B,并且偏好 B 胜过 C,那么他们必须偏好 A 胜过 C。
- 独立性(Independence)个体的偏好不应受到无关选项的影响。具体来说,如果个体偏好 A > B,而 C 是一个与 A 和 B 无关的结果,那么个体应该同样偏好 “A 与 C 的组合” 胜过 “B 与 C 的组合”,只要 A 和 B 的概率保持不变。
- 连续性(Continuity),如果 A > B > C,那么应该存在一个概率 p,使得个体对 B 的偏好等同于 A 和 C 之间的某种加权平均。
- 单调性(Monotonicity),如果A 是由 B 通过增加更好的结果而获得的,那么 A 应该被偏好于 B。
- 确定性原则(Sure-Thing Principle),如果个体在一个上下文中更喜欢 A 而不是 B,那么在另一个上下文中,他们也应该做出相同的选择,即使概率不同。
Allais悖论:违反期望效用理论
这显示人们在不同概率结构下的偏好是不一致的。
问题 1(确定性效应)
- 赌注 A:
- 33% 的概率赢得 £2500
- 66% 的概率赢得 £2400
- 1% 的概率什么都没有(£0)
- 赌注 B:
- 100% 的概率赢得 £2400(确定的收益) 实验结果:大多数人选择 B(确定性 £2400),而不是 A(尽管 A 的期望收益更高)。
解释:人们更倾向于规避风险,即使期望收益更高,他们仍然更喜欢确定的收益(确定性效应)。
- 100% 的概率赢得 £2400(确定的收益) 实验结果:大多数人选择 B(确定性 £2400),而不是 A(尽管 A 的期望收益更高)。
问题 2(相同期望值但不同概率结构)
- 赌注 C EV=825:
- 33% 的概率赢得 £2500
- 67% 的概率什么都没有(£0)
- 赌注 D EV=816 :
- 34% 的概率赢得 £2400
- 66% 的概率什么都没有(£0) 实验结果:在这个选择中,大多数人更愿意选择 C(赌更高金额的 £2500) 而不是 D。
解释:在没有确定性选项的情况下,人们倾向于接受更高的潜在回报,而在前一个问题中他们更倾向于规避风险。
Allais悖论核心:期望效用理论(EUT)假设人们的偏好是一致的,但 Allais 悖论 说明人们的偏好在不同的概率结构下是不一致的。这表明人们在面对确定性和风险时,会改变自己的决策方式。
面对确定性和风险的人类偏好(Human Preferences)
人们更倾向于接受确定的收益,即使期望值较低。
你会选择:
- 80% 的概率赢得 £100,20% 的概率赢得 £10(期望值 = £82)
- 保证获得 £80(确定性收益) 这个其实都不存在效用了,因为82大于80是铁打的。但实验结果:大多数人会选择 £80 确定性收益,即使第一项的期望收益更高。这反映了人类的风险规避(Risk Aversion),即人们更愿意接受低但确定的收益,而不是更高但有风险的收益。
参考点效应(Point of Reference Effect)
人们的幸福感取决于财富的变化,而不仅仅是最终财富。
Jack 和 Jill 目前都拥有 £5M:
- Jack 昨天只有 £1M → 他的财富增加了 £4M。
- Jill 昨天有 £9M → 她的财富减少了 £4M。 显然Jack更幸福,尽管他们的财富是相同的。这反映了参考点效应(Reference Point Effect),即人们的决策受到相对变化的影响,而不仅仅是绝对财富。
损失规避(Loss Aversion)
人们对损失的痛苦大于等额收益的快乐,这导致人们规避风险。
确定获得 £2M vs. 50% 的概率赢得 £4M,50% 可能什么都没有:
- 大多数人会选择 确定的 £2M,尽管期望值是相同的(£2M)。
- 说明人们更害怕损失,而不是追求更高收益。
应用
禀赋效应(Endowment Effect)
人们对自己已经拥有的物品赋予更高的价值,而不愿意放弃它,即使交易对自己有利。 研究人员给一半的参与者一个马克杯,另一半参与者没有。他们要求有马克杯的人给杯子定价,并询问没有马克杯的人愿意支付多少购买。结果:
- 拥有杯子的人 平均希望 $7 才愿意卖出。
- 没有杯子的人 只愿意支付 $3-$4 购买同样的杯子。 这说明人们对自己拥有的东西赋予了更高的价值,即使他们之前并不特别想要它。 一旦拥有某样东西,失去它的痛苦远大于获得它的快乐,这与损失规避(Loss Aversion) 有关。
框架效应(Framing Effect)
人们对相同信息的感知和决策会因其表述方式不同而产生偏差。
- 方案 A:「这个酸奶含 20% 脂肪」消极框架(Negative Framing) 让产品看起来不够健康。
- 方案 B:「这个酸奶 80% 无脂肪」积极框架(Positive Framing)让产品看起来更健康。 实验结果是,大多数人选80%无脂肪。即使它和「20% 含脂肪」完全一样。
前景理论(Prospect Theory)
解释了人们在不确定性下如何做决策,以及为什么他们的选择会偏离传统经济学中的理性模型,即为期望效用理论(Expected Utility Theory, EUT)。 核心观点:
- 人们不会以绝对价值衡量收益和损失,而是相对于一个参考点(Reference Point)来评估。
- 损失规避(Loss Aversion):人们对损失的痛苦程度远大于对等额收益的快乐程度。
- 非线性决策:人们对小概率事件和大概率事件的权重认知存在偏差。
四个关键创新:
- Pre-decision editing(决策前编辑)
- 人们在做决策前,会筛选和简化选项,删除一些明显不合适的选择,以减少认知负担。
- 例如:面对复杂的投资决策,人们可能只关注几个关键因素,而不是所有信息。
- Reference Dependence(参考点依赖)
- 人们的决策不是基于绝对收益,而是基于一个参考点(比如当前财富水平、过去经验等)。
- Gains versus Losses(收益 vs. 损失)
- 人们对损失的敏感度远高于对等量收益的敏感度。
- Loss Aversion(损失规避)
- 损失比相同的收益更令人痛苦,通常损失的痛苦是等额收益带来快乐的 2 倍。
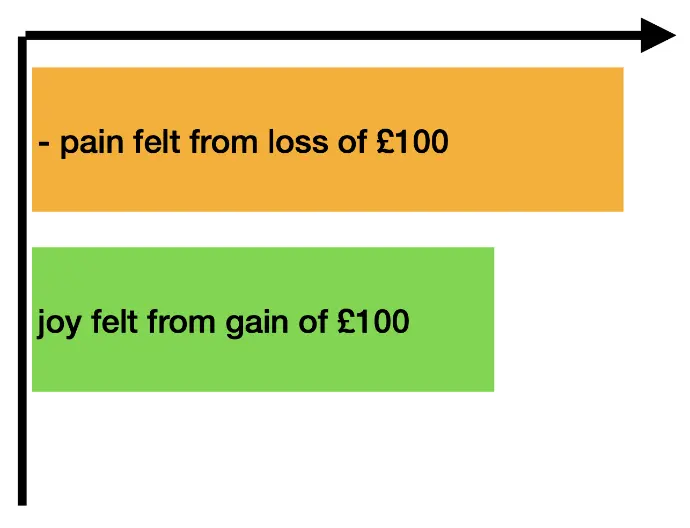
- 损失比相同的收益更令人痛苦,通常损失的痛苦是等额收益带来快乐的 2 倍。
前景价值函数(Value Function)
X 轴(横轴):收益与损失。Y 轴(纵轴):心理价值(Perceived Value) 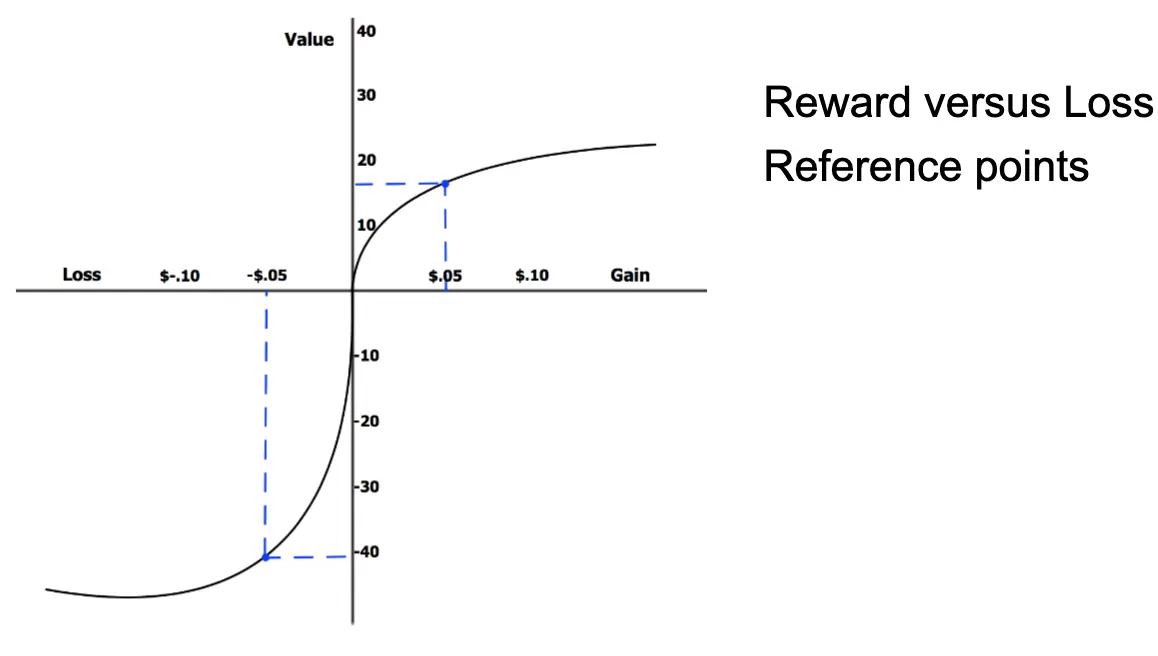 现实应用:
现实应用:
(1) 投资 & 行为金融学
- 投资者更不愿卖掉亏损的股票,因为卖掉股票会将损失变为现实,带来更大的痛苦。
- 股市恐慌性抛售:当市场下跌时,投资者的恐慌情绪比市场上涨时的乐观情绪更强烈。
(2) 营销与定价策略
- 免费试用(如 Netflix、Amazon Prime)利用禀赋效应和损失规避,让用户在试用后更难放弃订阅。
- 折扣 vs. 赠品:相比 10% 折扣,消费者更倾向于接受「买一送一」,因为「失去」 10% 价格折扣比「获得」免费商品的影响更大。
(3) 保险行业
- 保险公司利用损失规避心理,让客户愿意支付额外费用来避免潜在的大额损失。
- 例如,人们更愿意购买手机保险,即使手机损坏的概率很低。
(4) 赌场 & 赌博心理
- 赌场利用前景理论,设计「小赢大输」的策略,让赌徒继续下注:
- 小额的赢利(即使是 £1)会带来正向刺激,使赌徒继续玩。
- 但他们对损失的恐惧更大,因此容易加倍投入,希望弥补损失。
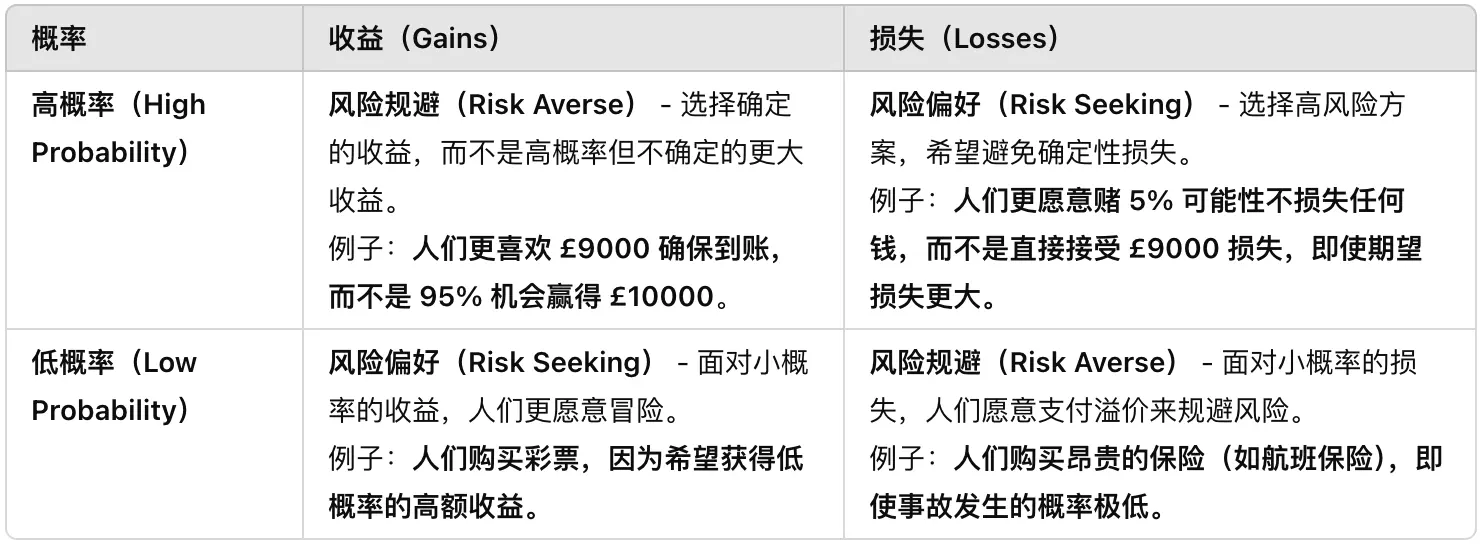
四重模式(Fourfold Pattern)
四重模式(Fourfold Pattern)是前景理论(Prospect Theory) 的核心扩展,它表明:
- 人们在不同的概率(高 vs. 低)和结果(收益 vs. 损失)下,展现出不同的风险偏好。
- “风险规避(Risk Aversion)” 和 “风险偏好(Risk Seeking)” 并不总是一致,而是受概率的影响。
 人们的风险态度并不恒定,而是取决于收益 vs. 损失和高概率 vs. 低概率。
人们的风险态度并不恒定,而是取决于收益 vs. 损失和高概率 vs. 低概率。
- 确定性效应(Certainty Effect):高概率时,人们更倾向于规避风险。(第一第二象限)
- 可能性效应(Possibility Effect):低概率时,人们更倾向于追逐机会。(第三象限)
- 损失厌恶(Loss Aversion) 解释了为什么人们愿意购买昂贵保险,即使风险极低。(第四象限)
Bias
人不是数学概念上的理性人。如果想要AI帮我们做决策,需要考虑到人的Bias。
Week 4 Supervised Learning
太简单了,很快过一遍。只写一些不太确定的内容。 分类器的评判标准: Accuracy, PRecision, Recall, F1 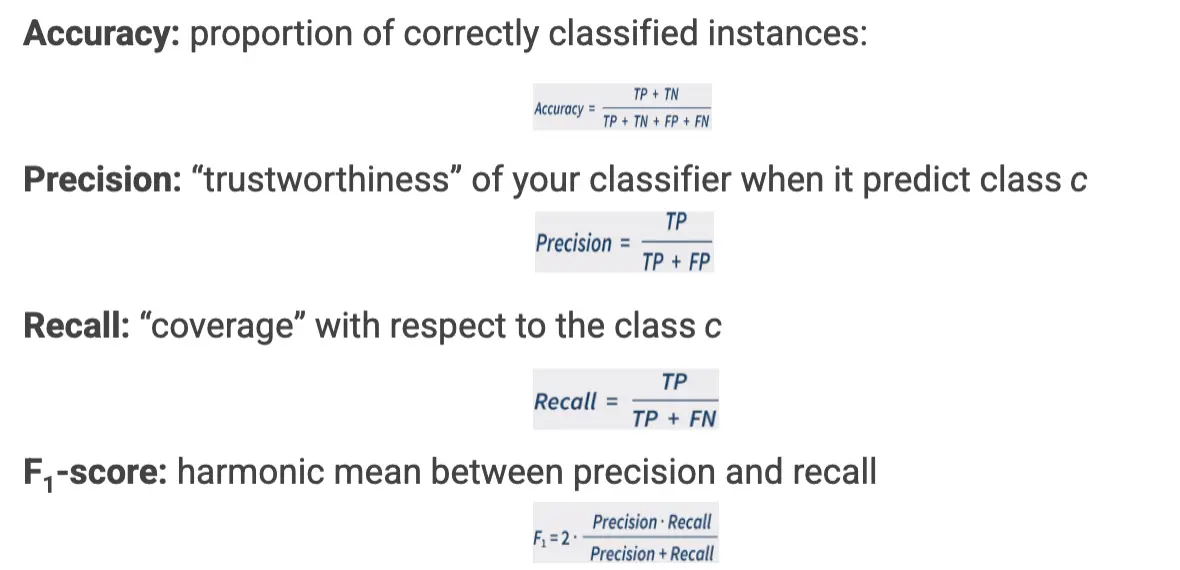
Week 5 Unsupervised Learning
无监督学习是指在无标签的情况下从数据中学习有趣的模式。 其中,聚类算法尝试去识别相似的群组 还会利用一些降维技巧来简化数据,但不使数据失真
Motivation Question
主题分类。 在有标签的情况下,你可以训练一个分类器。当拿到一个新的文章后,你可以用这个分类器来分类新文章。 但是这就涉及到一些问题,一方面是这类标签很贵,另外,如果有新主题的文章,而你的标签库里面没有这个新主题,那么这个文章的分类其实是不好的。 我们把Topic Analysis分为3个子问题: 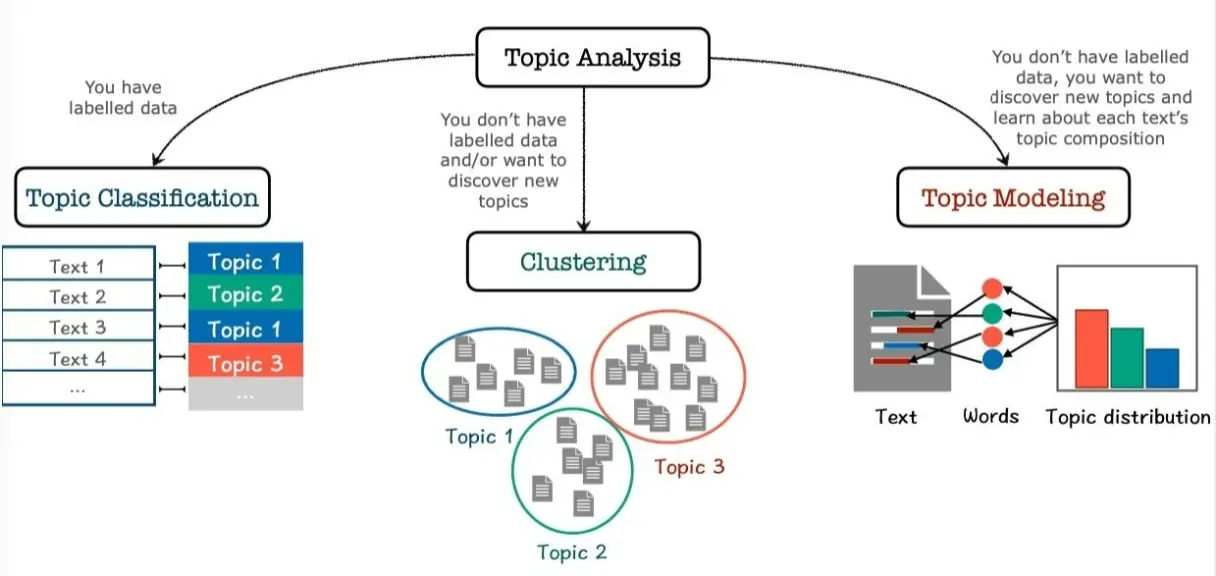 如果你有标签,那么你就用分类器去分类一个文章 如果你没有标签,你就用聚类算法 如果你没有标签,并且你还想去发现新主题,并了解一个文章属于某个主题的概率,那么就是Topic Modeling任务。
如果你有标签,那么你就用分类器去分类一个文章 如果你没有标签,你就用聚类算法 如果你没有标签,并且你还想去发现新主题,并了解一个文章属于某个主题的概率,那么就是Topic Modeling任务。
那么这些算法,一般是个什么pipeline呢? 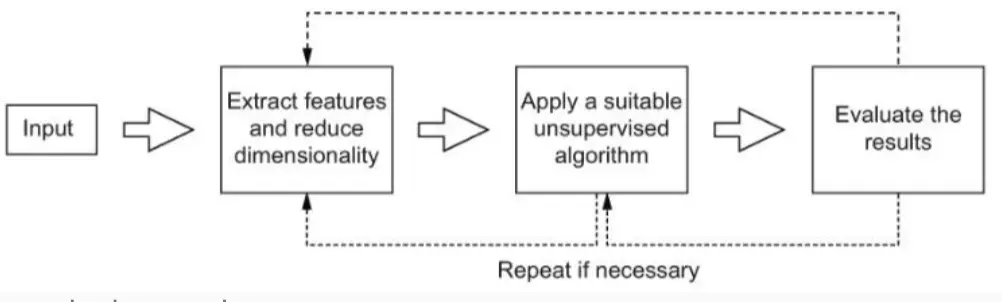
NOTE
- 输入(Input):输入的是一组文本数据,例如新闻文章、社交媒体帖子或论文摘要。
- 特征提取和降维(Extract features and reduce dimensionality):
- 文本数据通常是高维的(因为每个单词都可以是一个特征)。
- 降维的目标是去除噪声、减少计算量,使数据更易于处理。
- 常用的方法有 TF-IDF、Word2Vec、BERT Embeddings、SVD(奇异值分解)、PCA(主成分分析)、NMF(非负矩阵分解) 等。
- 应用无监督算法(Apply a suitable unsupervised algorithm):
- 由于主题建模是无监督的,常见方法包括:
- LDA(Latent Dirichlet Allocation)
- NMF(Non-negative Matrix Factorization)
- LSA(Latent Semantic Analysis)
- 这些方法会发现不同文档之间的相似性,从而归纳出潜在的主题。
- 由于主题建模是无监督的,常见方法包括:
- 评估结果(Evaluate the results):
- 由于无监督学习没有“正确答案”,评估通常依赖于可解释性(例如查看主题词的合理性)。
- 可能需要反复调整参数(如主题数量)。
💡 循环部分(Repeat if necessary):意味着如果结果不好,可能需要重新进行特征提取或调整算法参数。
Clustering
K-means clustering
NOTE
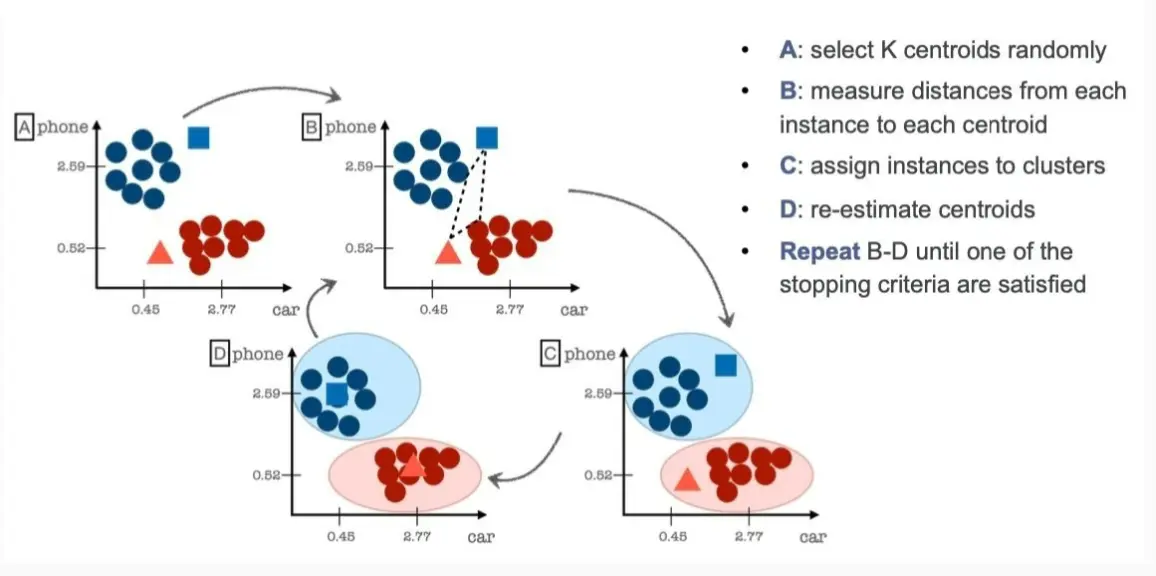
A) 选择 K 个随机质心(centroids)
- 质心是 K-Means 聚类的核心,每个簇的中心点。
- 在步骤 A,算法随机选择 K 个数据点作为初始质心(如图中蓝色方块和红色三角)。
(B) 计算每个点到质心的距离
- 计算所有数据点到当前质心的距离(常用欧几里得距离)。
- 例如,图中数据点计算自己到两个质心的距离。
(C) 分配数据点到最近的质心
- 每个数据点被分配到离它最近的质心,从而形成 K 个簇。
- 例如,图中红色点靠近红色三角,所以被分配到红色簇,蓝色点靠近蓝色方块,所以被分配到蓝色簇。
(D) 更新质心
- 计算每个簇的新质心(通常是簇内所有点的均值)。
- 例如,图中蓝色方块和红色三角的位置会随着簇的变化而调整。
(E) 重复 B-D,直到满足停止条件
- 可能的停止条件:
- 质心位置不再发生变化。
- 数据点的分配不再变化。
- 达到最大迭代次数。
那么如何选择最优秀的K呢?
Elbow Method
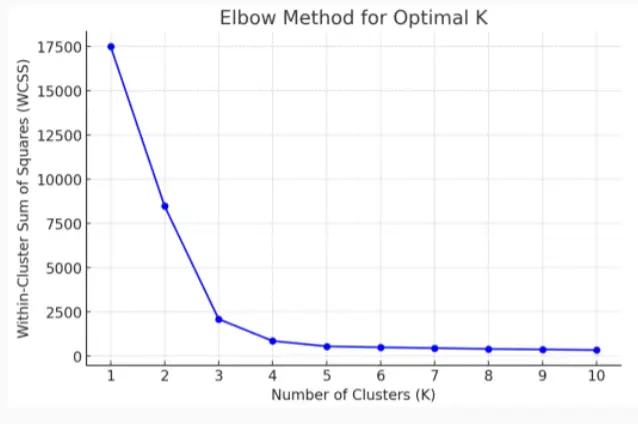 选择4
选择4
Silhouette Score 轮廓系数
轮廓系数衡量了簇内紧密性(cohesion) 和簇间分离度(separation),定义为
a = 点到同簇内其他点的平均距离(越小越好)。 b = 点到最近邻簇的平均距离(越大越好)。 S为-1到1,越接近1说明越好。 理想范围:0.5 到 1(数值越高,聚类质量越好)。选择最高轮廓系数对应的K
Dimensionality Reduction
如果一个向量维度过高,那么在k-means里面计算距离代价很高。 而且如果一个向量很稀疏,那不好。 解决方法有一个就是去除掉高频次,比如the a之类的 另一个方法就是SVD奇异值分解。其中应用于文本中的方法为LSA(Latent Semantic Analysis)
SVD
通过将一个矩阵分解为3个较小的矩阵来简化计算。你把三个矩阵乘起来就能得到原来的矩阵。 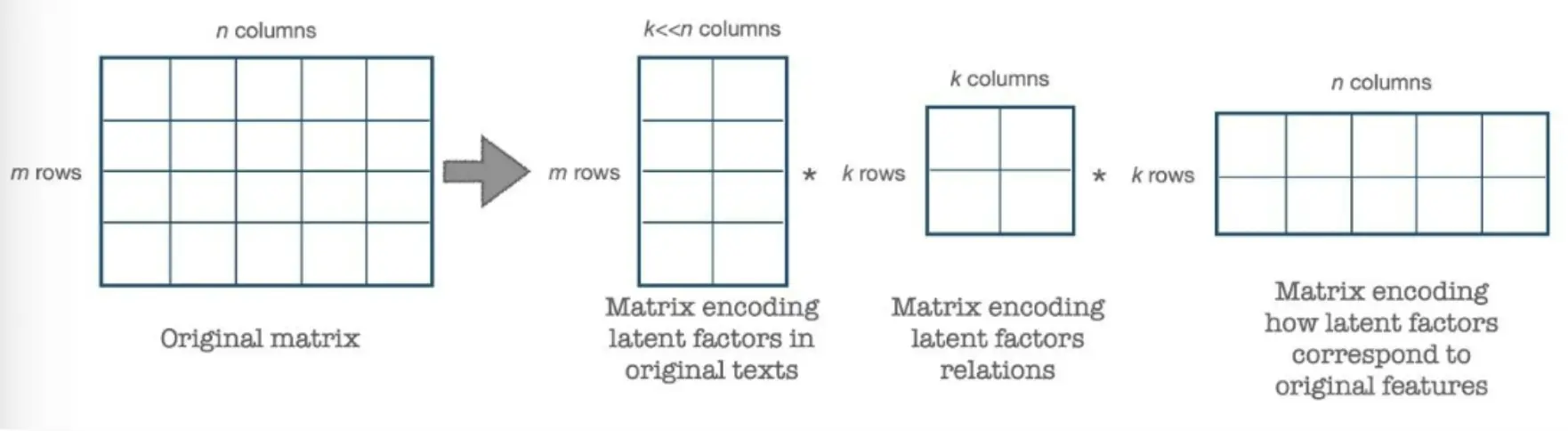
A为原始矩阵,U为左奇异矩阵,表示文本与主题(latent factors) 之间的关系,S为对角矩阵,表示每个主题的权重,V为右奇异矩阵,表示主题与单词(原始特征) 之间的关系。 至于数学上如何分解,是一个固定的流程,这里不介绍了。 如果想要再次降低矩阵的维度,可以选择前k个最大的奇异值,这就是低秩近似。
Evaluating Clustering Algorithms
- 内部评价标准:
- 依赖于空间(space)和距离度量(distance metrics),如欧几里得距离、余弦相似度等。
- 轮廓系数(Silhouette Score),簇内误差平方和(WCSS,Within-Cluster Sum of Squares):用于 Elbow Method 选择最佳 K 值。
- 下游任务评价
- 信息检索的速度,实用性
- 外部评价标准
- 如果数据有标签(如文本分类任务),可以检查聚类结果是否与已有类别匹配。
- Purity,Homogeneity,Completeness,V-measure这些指标都属于 外部评估指标(External Evaluation Metrics),用于衡量聚类结果与真实类别(ground truth)之间的一致性。 它们主要用于有已知类别标签(labeled data)的数据集,可以比较聚类算法的性能。
Purity
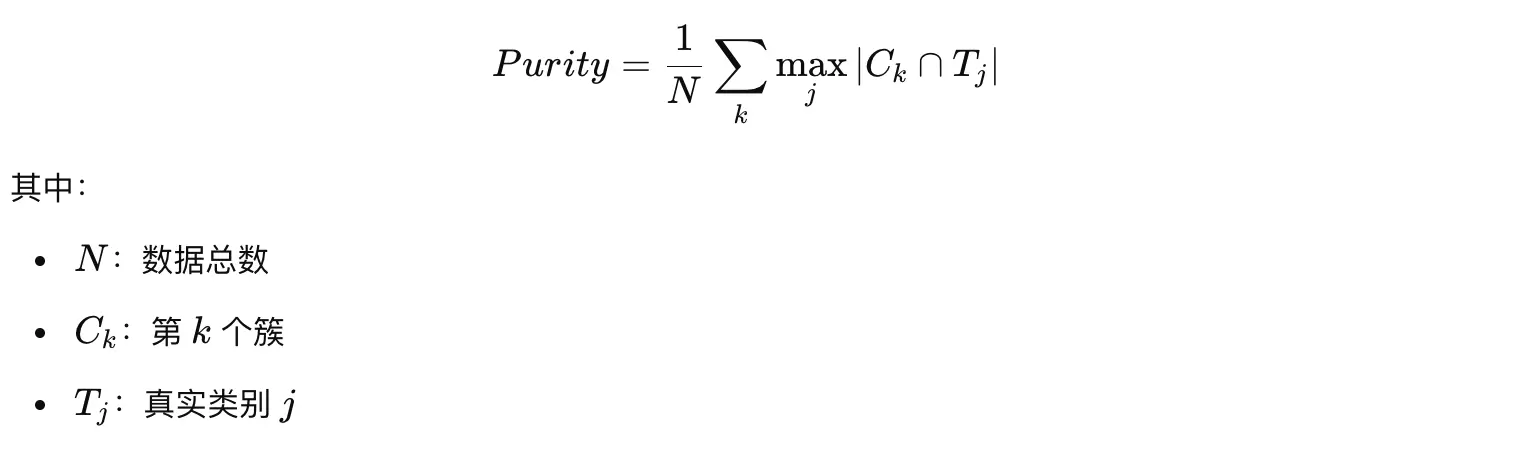
- 确定每个簇的主类别(majority label),即该簇内出现最多的真实类别。
- 统计该类别的样本数,作为正确分类的样本。
- 计算所有簇中正确分类的样本占比,得到 Purity 值。
Homogeneity(同质性)
如果每个簇只包含单一真实类别的数据点,则聚类具有同质性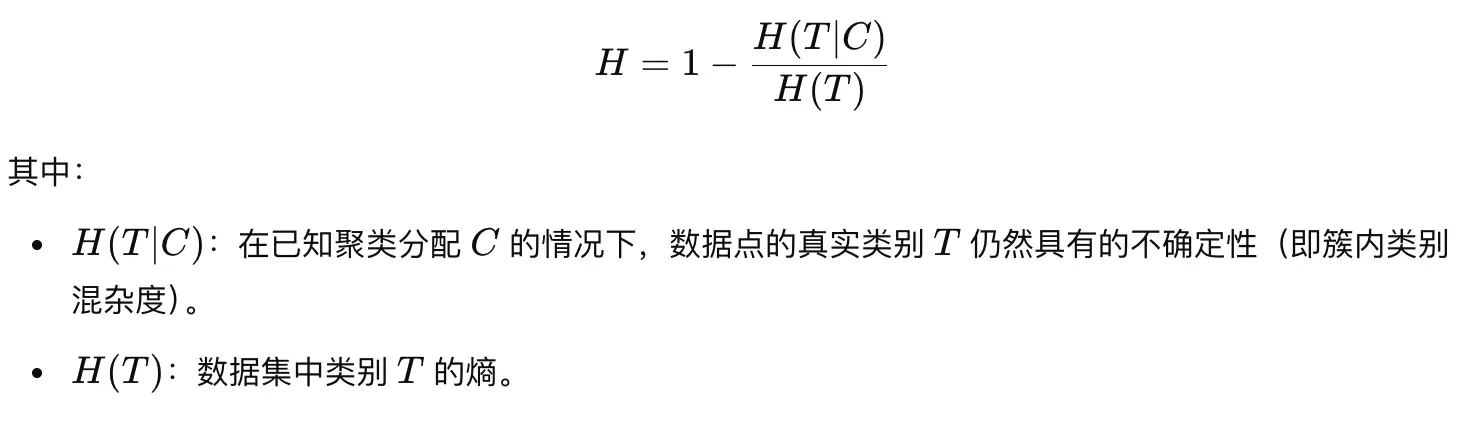 越大越好。
越大越好。
Completeness(完整性)
如果某个类别的所有数据点都被分配到同一个簇,则聚类具有完整性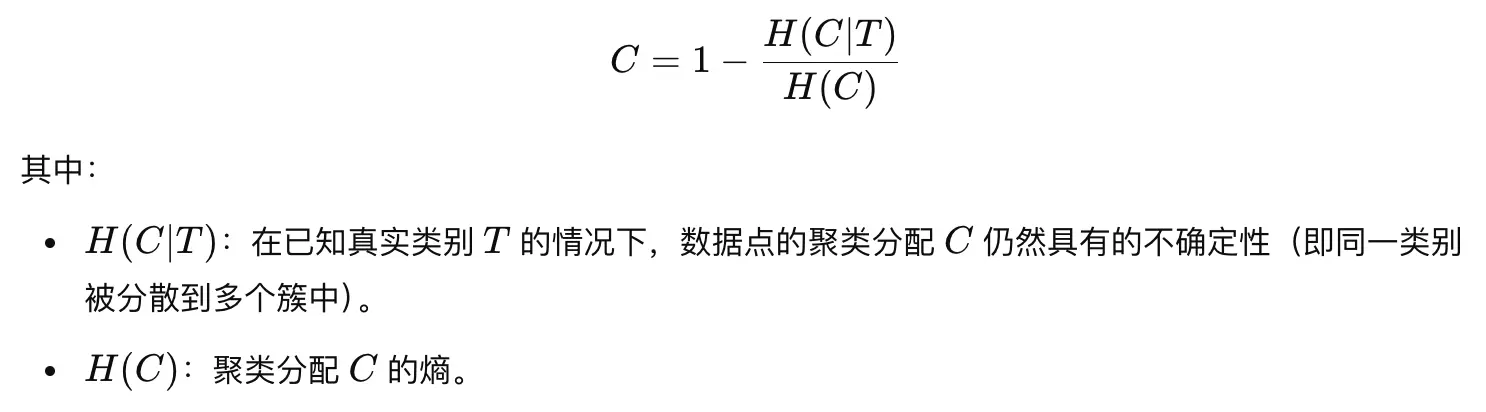
V-measure
V-measure 是 Homogeneity 和 Completeness 的调和平均数.兼顾簇的纯度(Homogeneity)和类别的完整性(Completeness),相比单独使用某一指标,更加稳定。 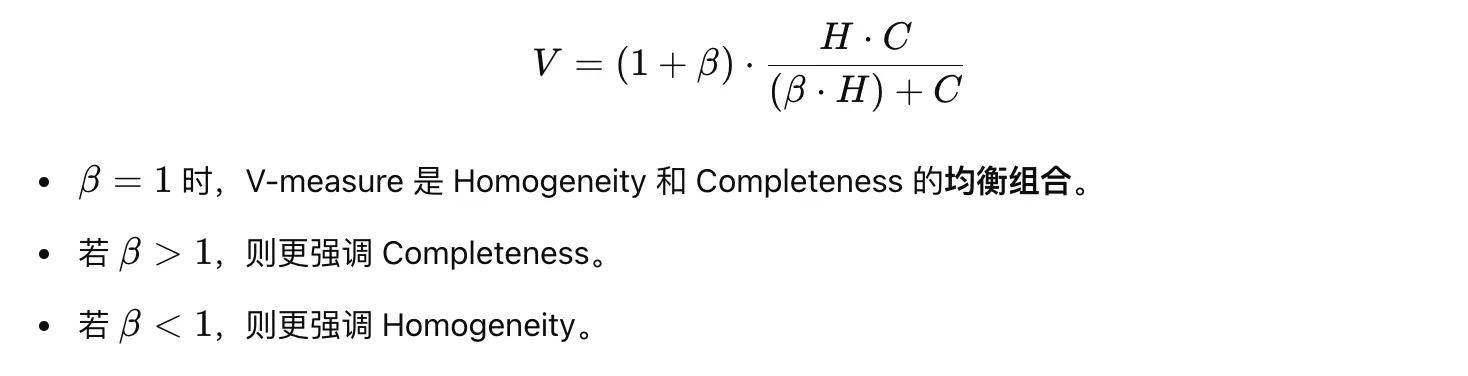
Topic Modelling
如果你是一个编辑,考虑用ML方法来分类,那么你应该这样选择:
- 如果有高质量的标注数据,可以使用 文本分类(Supervised ML) 来自动化新闻分类。
- 如果需要发现新话题,可以使用 无监督学习(Unsupervised ML),例如 LDA 主题建模 或 聚类(K-Means)。LDA可以发现新出现的潜在主题,K-means只能发现新主题但是给不出主题词。
- 如果文章可能涉及多个话题,可以使用 LDA 来获取 主题概率分布,让文章归类更加灵活。
Latent Dirichlet Allocation
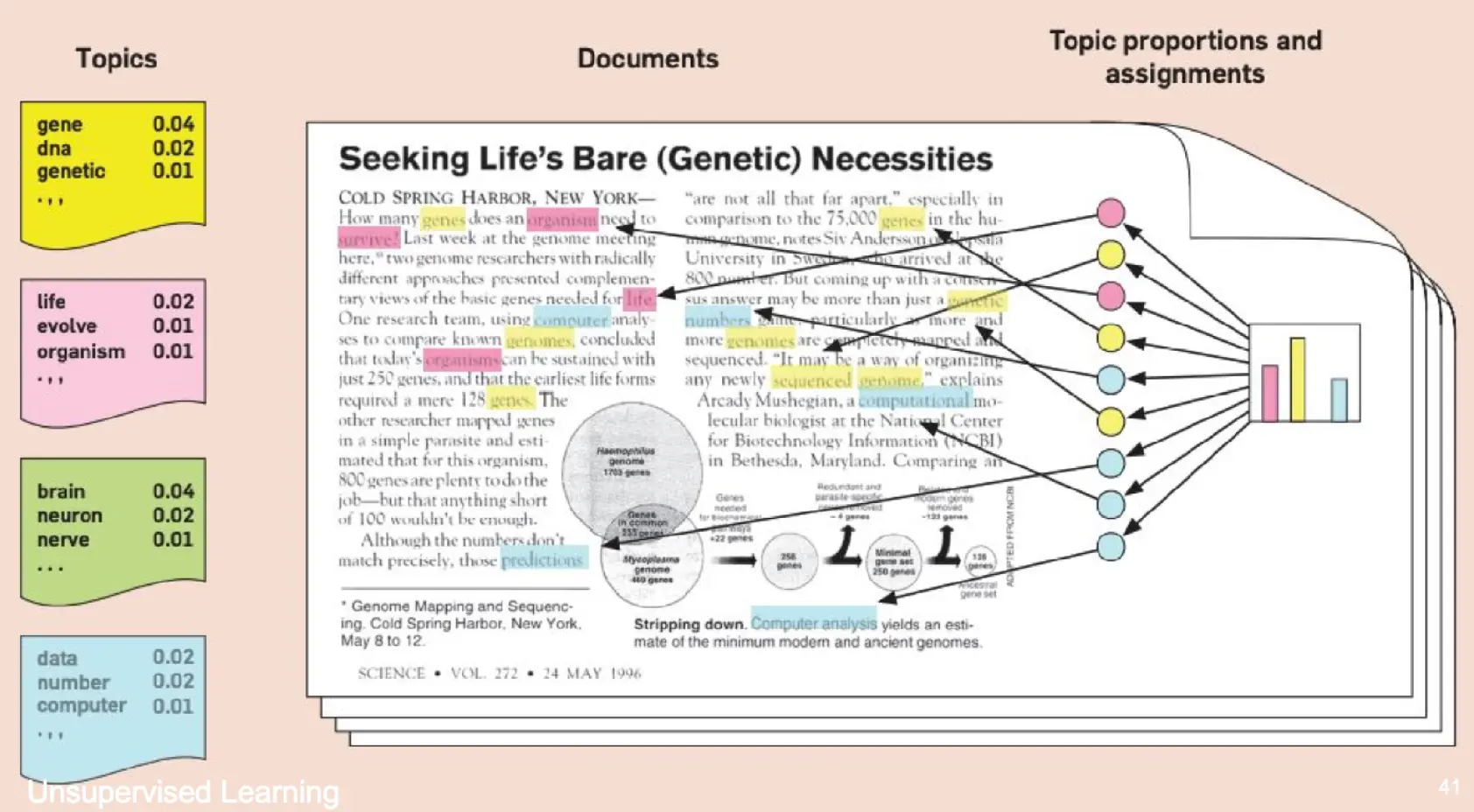 LDA 假设文档是“先有主题,再有单词”生成的,目标是通过无监督学习找出隐藏的主题结构。 LDA本身是一个生成模型,其原理是,认为一篇文章遵守主题的分布,然后主题所对应的词也遵守分布,那么如果一篇文章由80%的主题A和20%的主题B组合而成,那么每个单词都是先采样主题,再在对应主题里面采样主题词所生成的。
LDA 假设文档是“先有主题,再有单词”生成的,目标是通过无监督学习找出隐藏的主题结构。 LDA本身是一个生成模型,其原理是,认为一篇文章遵守主题的分布,然后主题所对应的词也遵守分布,那么如果一篇文章由80%的主题A和20%的主题B组合而成,那么每个单词都是先采样主题,再在对应主题里面采样主题词所生成的。
但是,由于LDA这个过程是一个严格的采样过程,他就可以用贝叶斯推理给它逆过来,也就是说,你可以通过给定文章,来推断一个主题中对应主题词的概率,也可以推断一篇文章的主题分布。
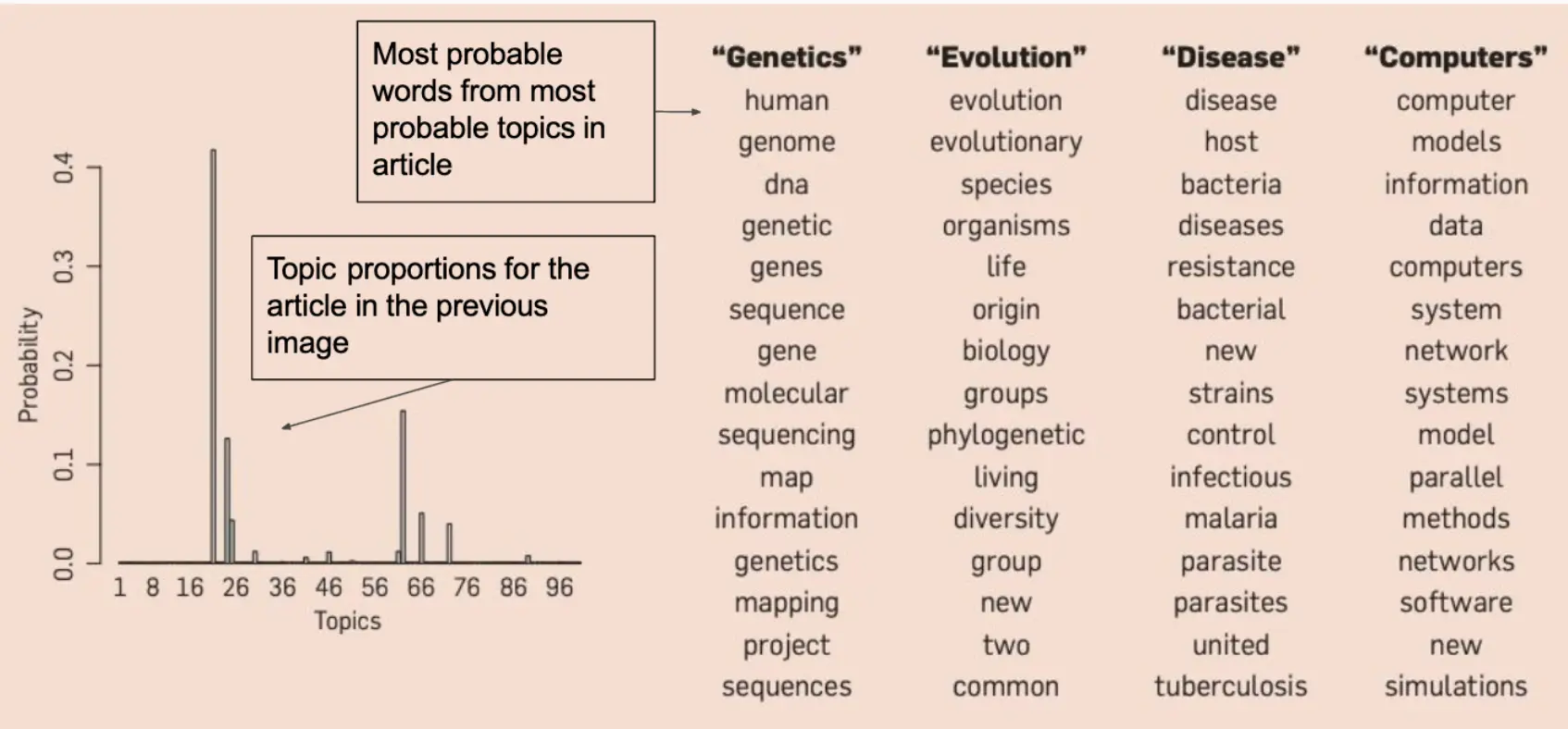 例子: LDA经过训练之后,得到了3个主题的高频词分布: 主题 1: AI, deep learning, neural network, algorithm, data 主题 2: election, government, policy, law, president 主题 3: football, game, player, goal, team
例子: LDA经过训练之后,得到了3个主题的高频词分布: 主题 1: AI, deep learning, neural network, algorithm, data 主题 2: election, government, policy, law, president 主题 3: football, game, player, goal, team
LDA在经过训练之后,已经提前知道了一堆词和一堆主题的对应关系,也就是说LDA知道了P(单词|主题),以及P(主题|文章),然后LDA拿到一个文章后,对每个词,不断通过贝叶斯反推不断计算P(主题|单词)来为每个词分配到一个合适的主题
当我们拿到一篇文章,这里用一句话举例子: AI is transforming government policy and sports analytics.
那么流程就是;
- LDA 先随机分配单词到主题(初始化)
- "AI" 可能被分到 主题 1,"government" 可能被分到 主题 2,但这只是随机的。
- 此时 主题 1、2、3 还没有名字,我们不知道它们代表什么。
- LDA 通过贝叶斯推断(如吉布斯采样)反复更新主题分配
- 通过计算 P(主题 | 文档) 和 P(单词 | 主题),不断调整每个单词的主题归属。
- 主题 1 可能含有 "AI, neural network, model, deep learning" → 其中AI的概率最高,那么这个主题就叫AI。主题 2 可能含有 "government, policy, election, law" → 其中goverment概率最高,那这个主题就叫goverment。
重新写一下LDA的训练以及推理过程
LDA模型假设一个模型是先选定主题分布
z为主题,k为主题编号,w为词,v为词编号。 文章-主题分布为:
d为给定文章。
训练
LDA训练只需要一堆文章语料,以及所期望的k的数量(主题数量),不需要其对应的主题,或者分布。 训练过程中,先随机把语料中的每个词分配一个主题标签z,然后对每个词做一些基于Gibbs 采样的迭代更新。反正训练结果是得到了: 主题–词分布,给定主题k,我就能知道其词v的分布:
以及文档–主题分布,给定文章d,我就能知道其主题的分布:
推理
目标:给定一篇未见过的文档,计算它的
Week 7-8 Recommender System
推荐系统是根据用户的一些信息为用户过滤内容的任何系统。 推荐系统有如下的动机:
- 信息过载(choices overload)
- 个性化(personalization)
- 提升决策质量与用户体验
- 增加平台转化率与销售额
RS的成功视角判断
- 多视角/多目标
- 不存在一个通用的、放之四海皆准的评价体系
- 信息检索(Retrieval)视角
- 快速帮用户定位想要的内容。降低搜索成本,提供“正确”候选,用户心里有数。
- 推荐(Recommendation)视角
- 给用户带来“惊喜”,发现长尾中的潜在感兴趣项。
- 长尾指的是那些小众能满足用户需求,但是知道的人少的东西。
- 预测(Prediction)视角
- 精确地预测用户对某个物品的喜好程度(打分)。
- 如 RMSE、MAE 等
- 交互(Interaction)视角
- 在推荐过程中让用户感觉良好,同时帮助他们更深入地了解产品领域。
- 转化(Conversion)视角
- 在商业环境下通过推荐直接提升业务指标。
RS简要定义
RS以用户建模(ratings, preferences, demographics, situational context)以及物品(带有或不带有物品特征描述)作为输入, 输出有:
- Good items:“最合适”的一批候选物品,如 Top-N 推荐列表
- Relevance score:给每个候选物品打一个“相关性分数”或“预测评分”
- Ranking:按照相关性分数对所有物品进行排序,最上面的就是最优推荐
- User interests:从用户历史行为中抽象出的兴趣画像(兴趣主题分布、潜在因子向量等),用于辅助长期建模或解释推荐结果
RS与信息检索有区别
信息检索IR:用户知道需求,目标是快速找到正确的信息 而RS来说,用户不一定明确需求,系统想要推荐一些可能用户感兴趣的午评,通过常委发现意外但相关的东西。
推荐系统类别
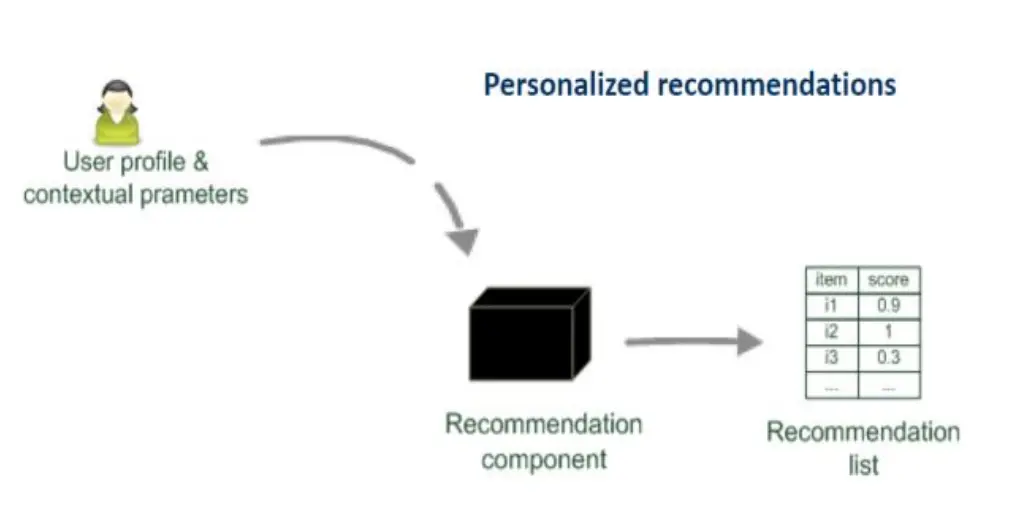
- Personalized recommendations
- 协同过滤 (Collaborative): 我的同僚喜欢什么
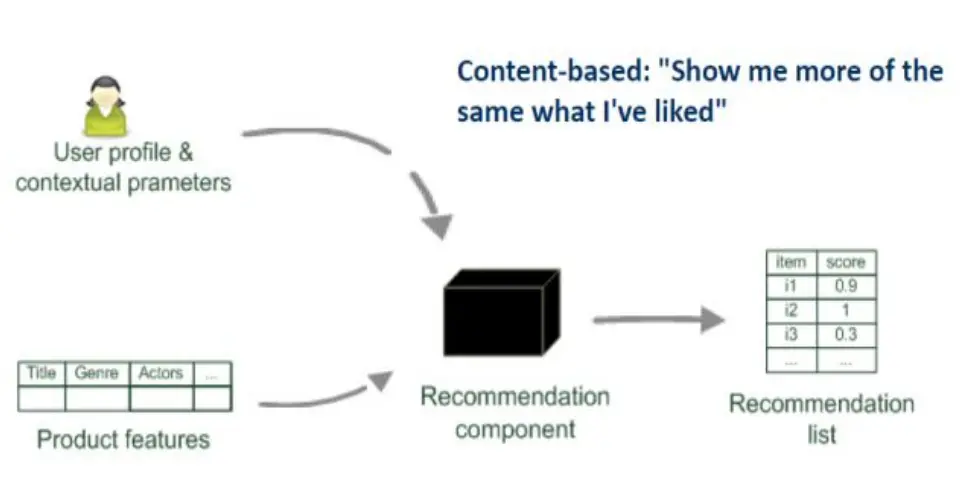
- 基于内容:根据我以前看过的,推荐一些我可能感兴趣的
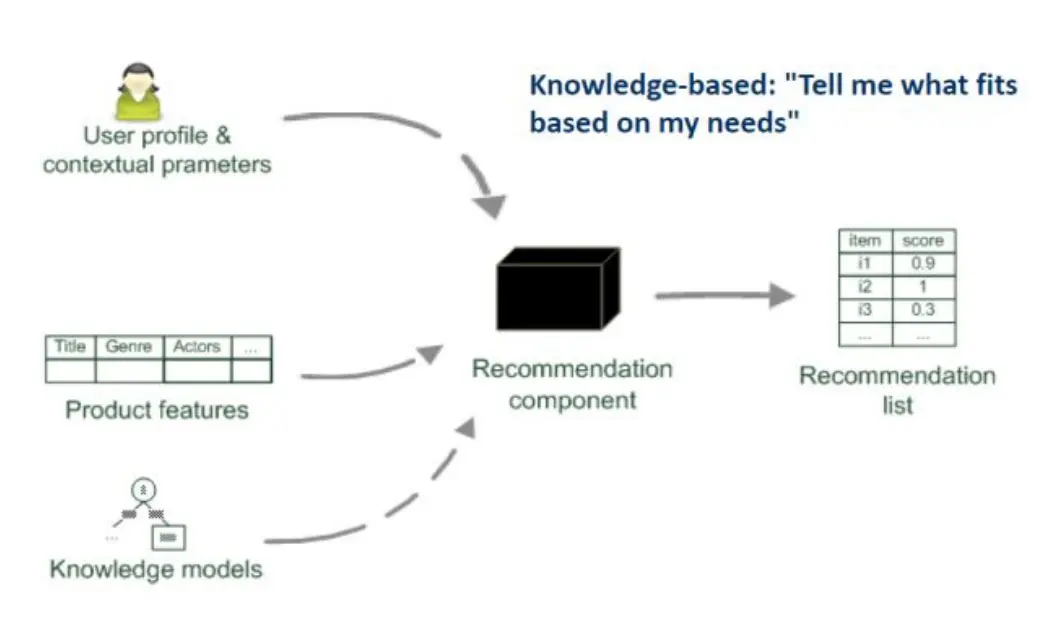
- 知识驱动:根据我的需求,推荐一些内容
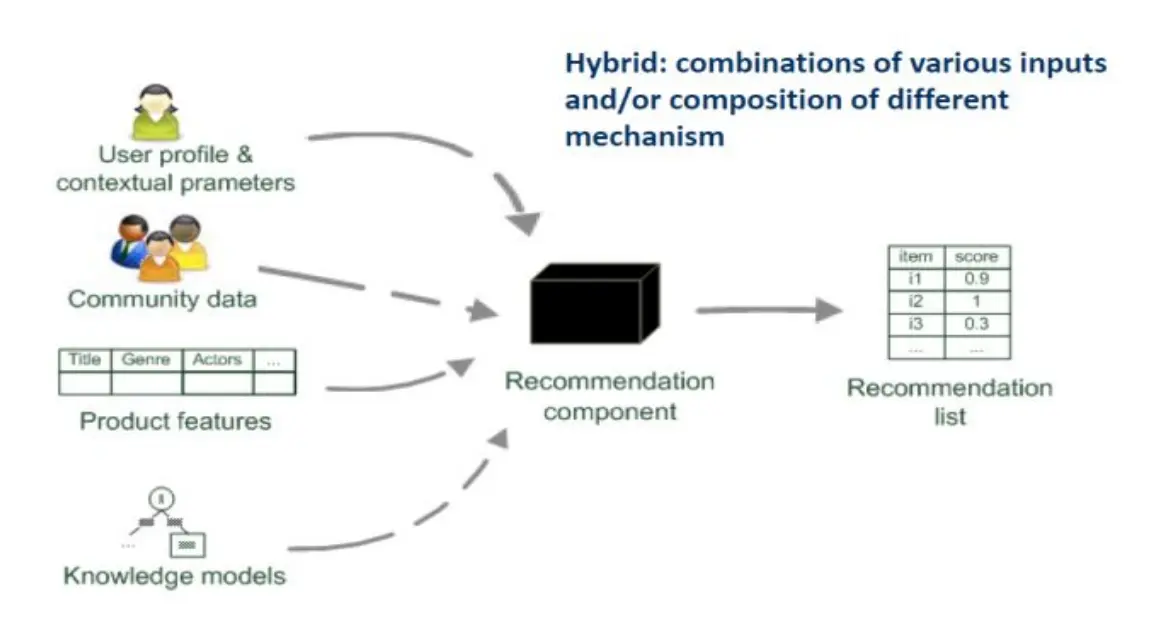
- 混合型:上面的都拿过来,都考虑
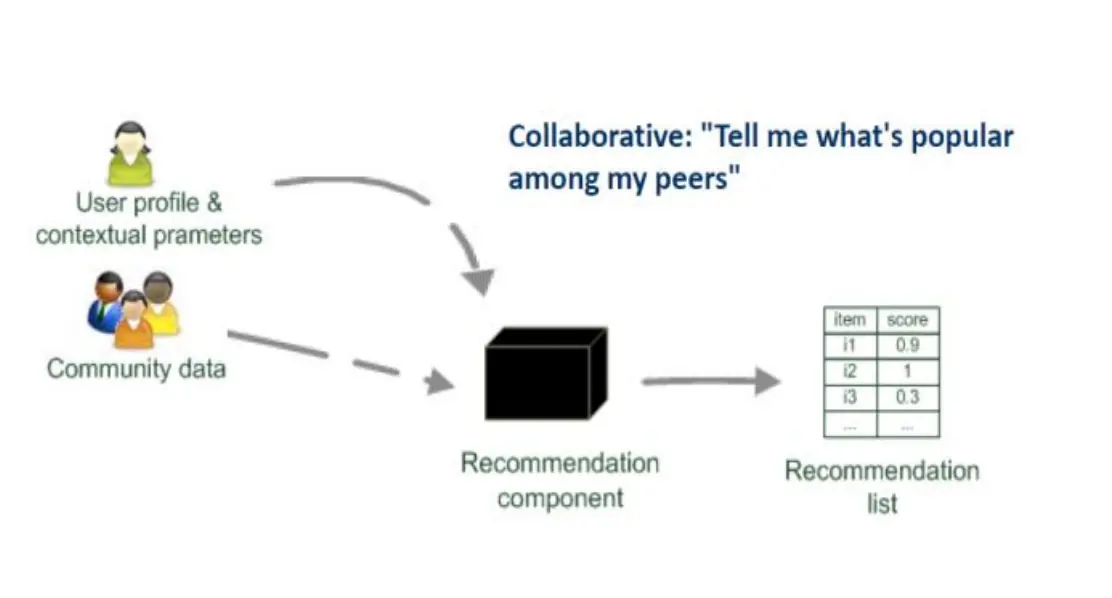
Collaborative Filtering 协同过滤
输入:用户-物品评分矩阵 输出:(数值)预测,指示当前用户对某个特定项目的喜好程度,以及一个Top-N推荐表
一般有两种CF:
- User-based CF
- 计算用户相似度,根据其他用户的评分预测该用户对新物品的评分
- Item-based CF
- 根据用户过往的高分评价物品计算相似度,推荐新物品
User-based CF
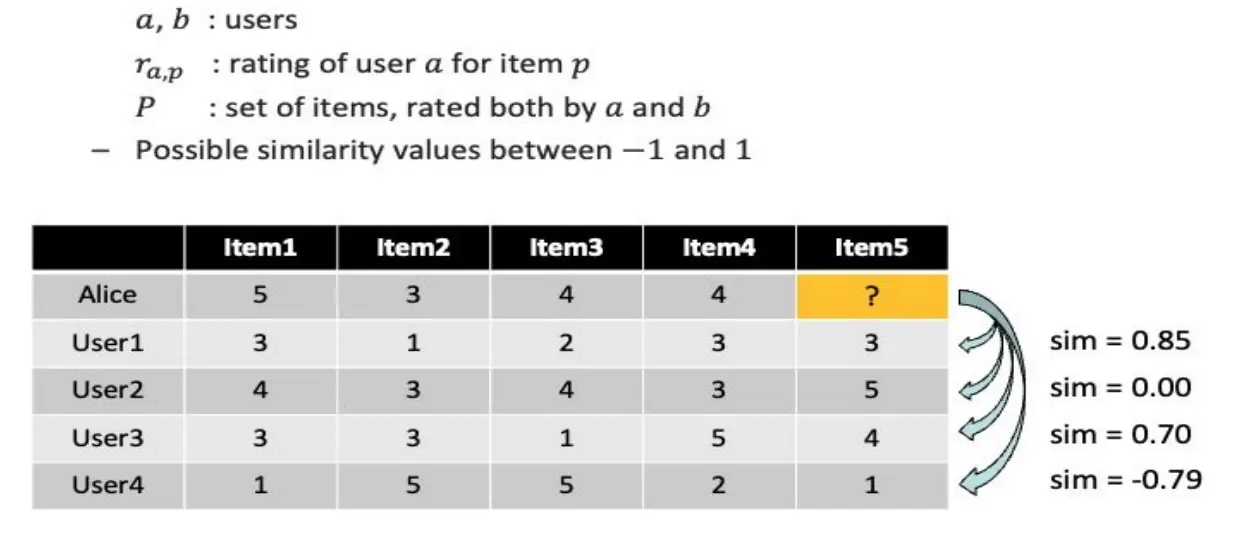
最basic的idea:想要知道A对一个没见过东西的评分,就去找他已经对这个东西打过分的相似的伙伴,然后平均他们的评分。
- 如何计算相似性?
- Pearson correlation
- a,b是用户,r_(a,p)是a对物品p的评分,P是物品集,那么相似度被定义为:
- Pearson correlation
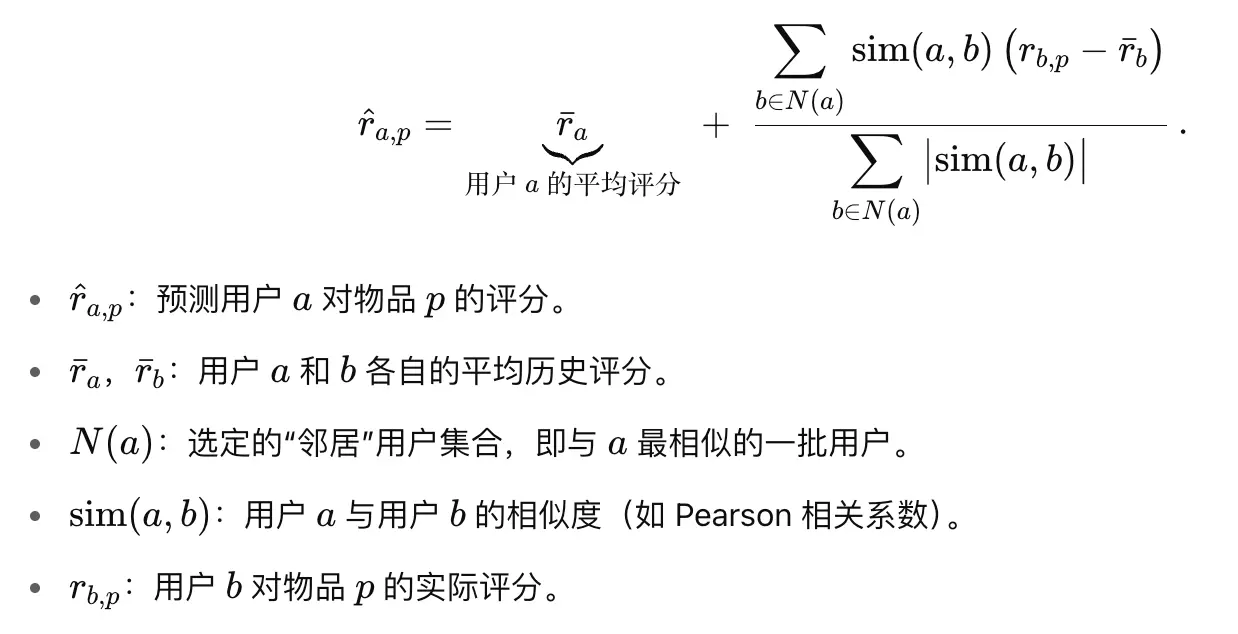
- 如何预测?
- 先做去中心化,只去计算超出平均的部分。相当于是相似度对偏差的加权
Item-based CF
最basic的idea:使用物品的相似度来预测。
- 如何计算相似度?使用Adjusted Cosine Similarity
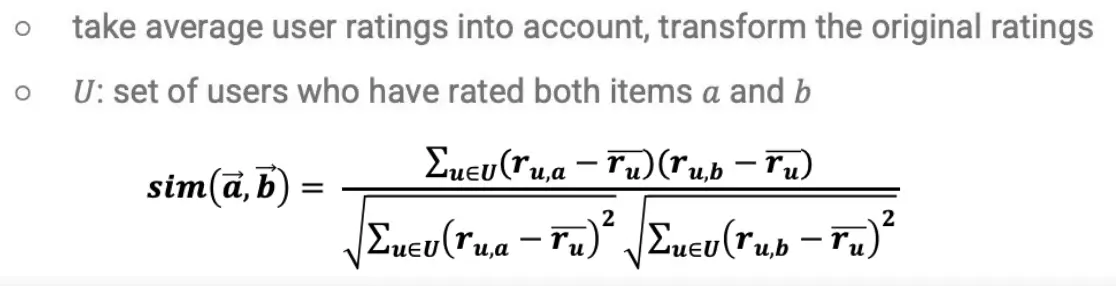
- 如何做预测?
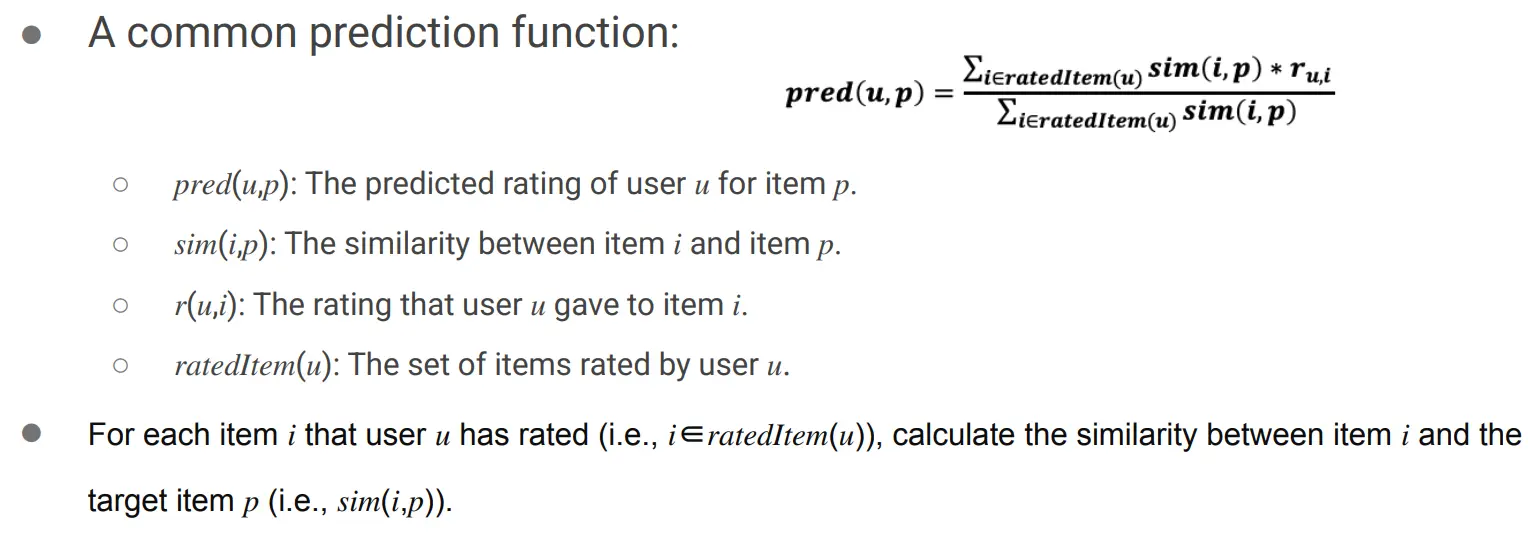
两个的预测方法都是一样的,只不过计算sim的方法不一样。 对于User-based CF,计算人与人之间的相似度,然后以不同人的分数对相似度加权算出新物品的分数。 对于Item-based CF,计算物品之间的相似度,然后以不同物品的相似度对他们自己的分数加权得到新物品的分数。
评分怎么来?
协同过滤依赖于用户的评分。评分可以分为两种: 显式评分:5星评分,喜欢/不喜欢等。 问题:用户懒得评分,如何刺激用户评分等。 隐式评分:点击率,购买率,观看时长等。简单收集,但无法准确解释用户的行为。 还有一些别的问题:
- 冷启动问题
- 数据稀疏性:用户只和项目的一小部分进行了交互
- 可扩展性:item或people数量增加,计算成本昂贵
- 流行度偏差:更频繁地推荐热门项目
- 人口统计偏差:偏向于成年,年轻人。
Content-based recommendation 基于内容推荐
虽然协同过滤这个方法只需要利用物品的评分,而不需要物品本身的属性是一个优点,但其实如果能够将一些物品的特性利用起来,比如说一本书的类型、关键词、作者风格等,那肯定更好。 比如,对之前更喜欢科幻小说的人推荐科幻小说。大多数的基于内容推荐技术都被用于推荐文本文档。任何需要被推荐的物品都可以表示为某种文本:
- 可以是结构化的描述,比如说(genre、keywords、actors、product features…)
- 可以是没有结构化的描述,比如一段评论。
所以,我们需要干两件事:
- 物品“内容”信息:每个物品的一组属性(genre、keywords、actors、product features…),通常抽象成特征向量。
- 用户“偏好”模型:根据用户历史看过或打高分的物品,构造一个用户偏好向量(可以是这些物品特征的加权平均)。
对于结构化描述
如果物品和用户已经被结构化描述了: 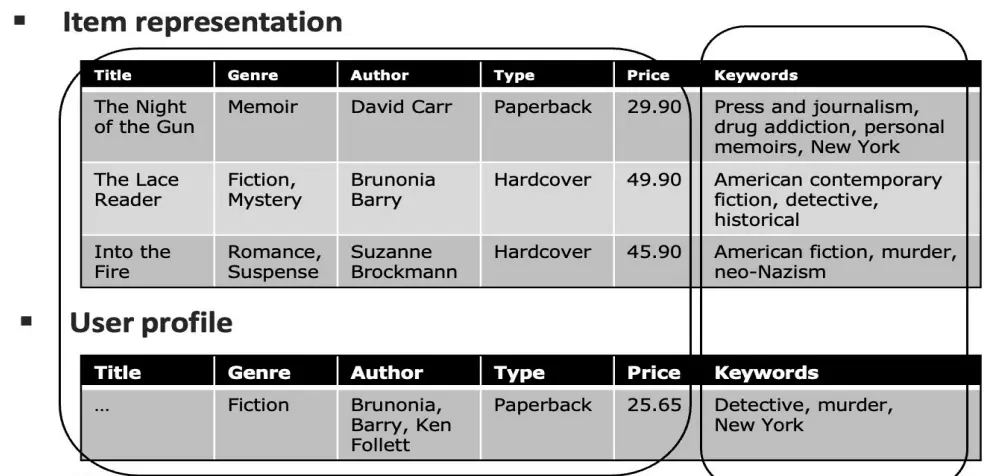 那么计算相似度的方法就是Dice 系数
那么计算相似度的方法就是Dice 系数
然后呈现Top-N就行了。
对于非结构化描述
简单的结构化表达有一些问题:
- 不是每个词都有着相同的重要性
- 更长的文本其实有着更大的可能与用户profile进行重合
所以,我们用TF-IDF方法。它把每个词在文档中的重要程度建模为一个实数权重,从而解决上述问题 首先计算TF(Term Frequency):
然后计算IDF(Inverse Document Frequency): 其中 𝑁 是所有文档总数, 𝑛 ( 𝑖 ) 是包含词 𝑖 的文档数。
IDF衡量了词的稀有度。
最终TF-IDF定义为:
用这个东西再和用户画像再去计算sim。用户画像怎么算?一个可能的做法是把用户看过的内容的TF-IDF进行加权平均。另一个可能的做法是用户自己写一段内容,然后进行TF-IDF表达。
TF: 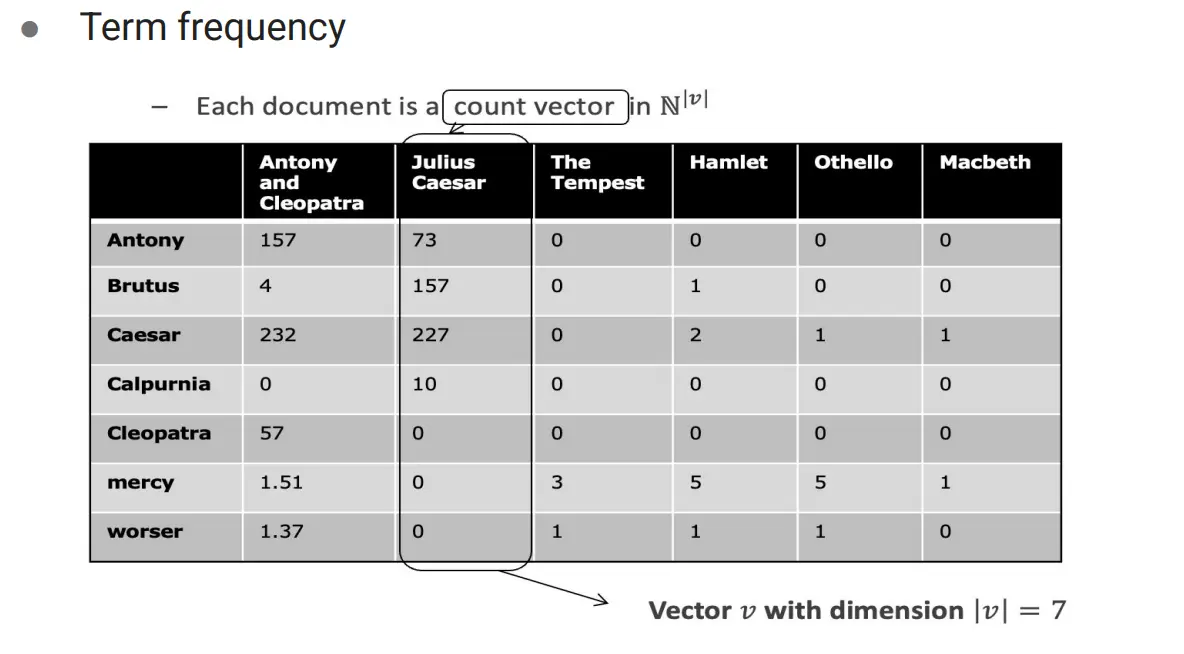 TF-IDF:
TF-IDF: 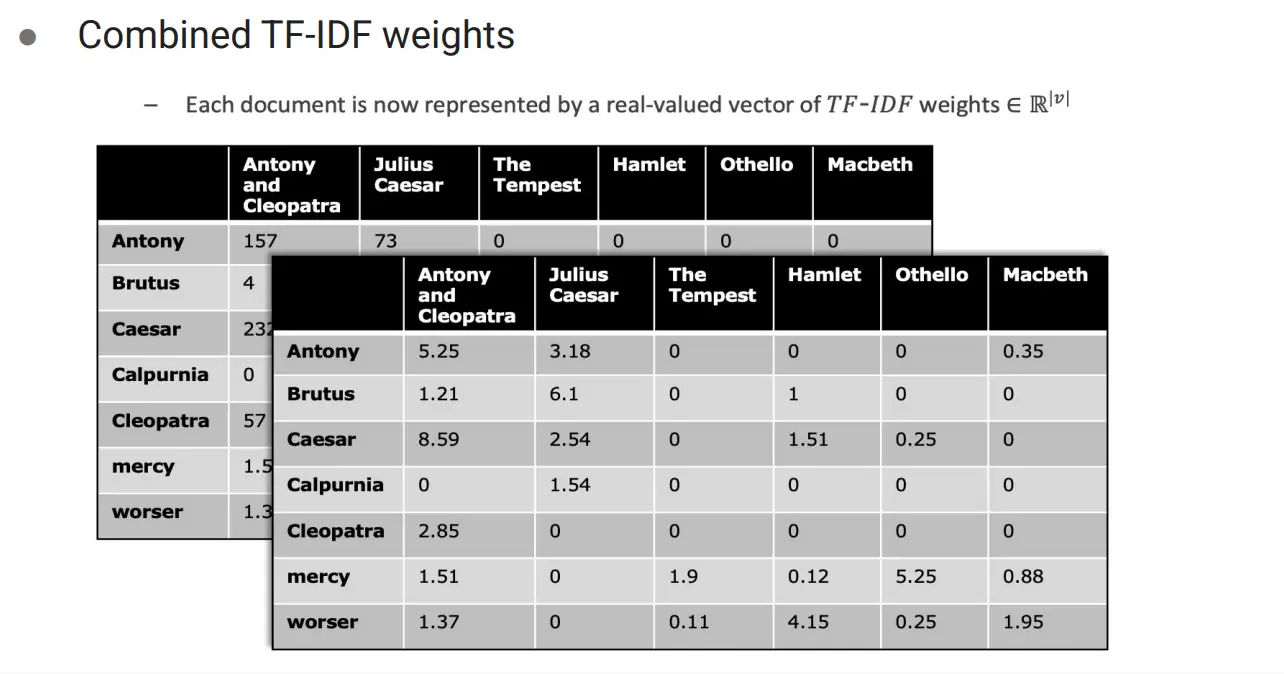
改善TF-IDF的向量空间
可以看到,TF-IDF的向量一般都很长,而且比较稀疏。我们要采取一些手段:
- Stemming(词干提取):把同根但形态不同的词(going、goes、gone)都归到它们的词干(go)上
- Size cut-offs(特征截断):只保留最具代表性的前 N 个高权重词(比如 top-100),把低频或与主题无关的“长尾”词丢掉
- 利用词汇知识:借助领域词典或人工规则,剔除在当前任务/领域中无关紧要的词,比如金融文本里删掉 “movie” 之类无意义项。
- 短语检测:自动把“United Nations”、“New York”当作一个整体特征
另外,目前是有一些局限性的,无法利用语义。 比如,如果一个肉食餐厅的评论中大量出现:没有vegetarian喜欢的菜,那么不断出现的vegetarian可能会导致这个餐厅被推荐给素食主义者。
- 我们可能需要引入BERT或者规则系统来补足
轻量级方法-基于最近邻的CB RS
把用户看过并已经标记喜欢/不喜欢的那一小批文档D当作已知兴趣集。 对于一个还未见过且待推荐的文档i:
- 计算它与D中每个文档的内容相似度(cos相似,TF-IDF距离等)
- 找出与i最相近的k个邻居文档
- 算喜欢占比
优点:简单直观,非常适合短期兴趣捕捉。 缺点:k太小容易过拟合。太大容易混入冷门噪音
轻量级方法-基于概率分类的方法
将每个候选文档视为一个待分类对象,根据它的内容特征判断它是“hot”(用户会喜欢)还是“cold”(用户不会喜欢)。 使用二分表示: 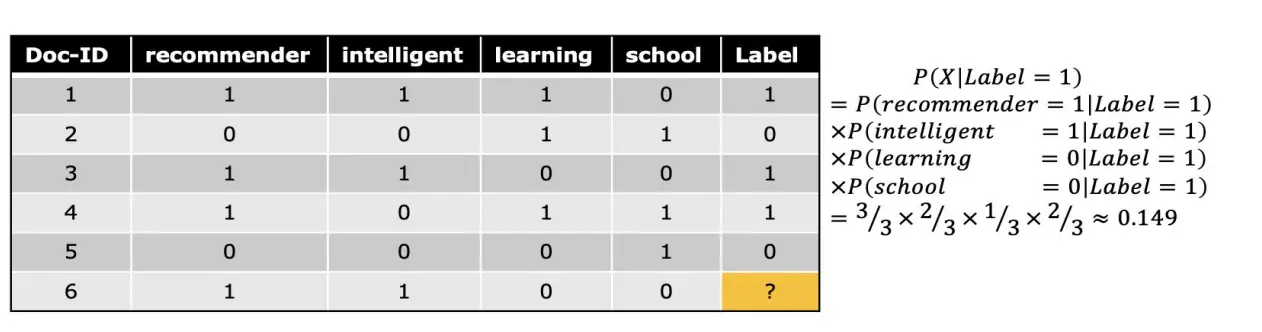 优点是简单,缺点是朴素独立性假设往往不成立(关键词之间高度相关)。
优点是简单,缺点是朴素独立性假设往往不成立(关键词之间高度相关)。
轻量级方法-基于线性分类器
就是还是用TF-IDF对内容建模,然后使用线性分类器或者别的分类器去分类。
轻量级方法-基于决策树
使用规则归纳和决策树来判断用户是否喜欢。 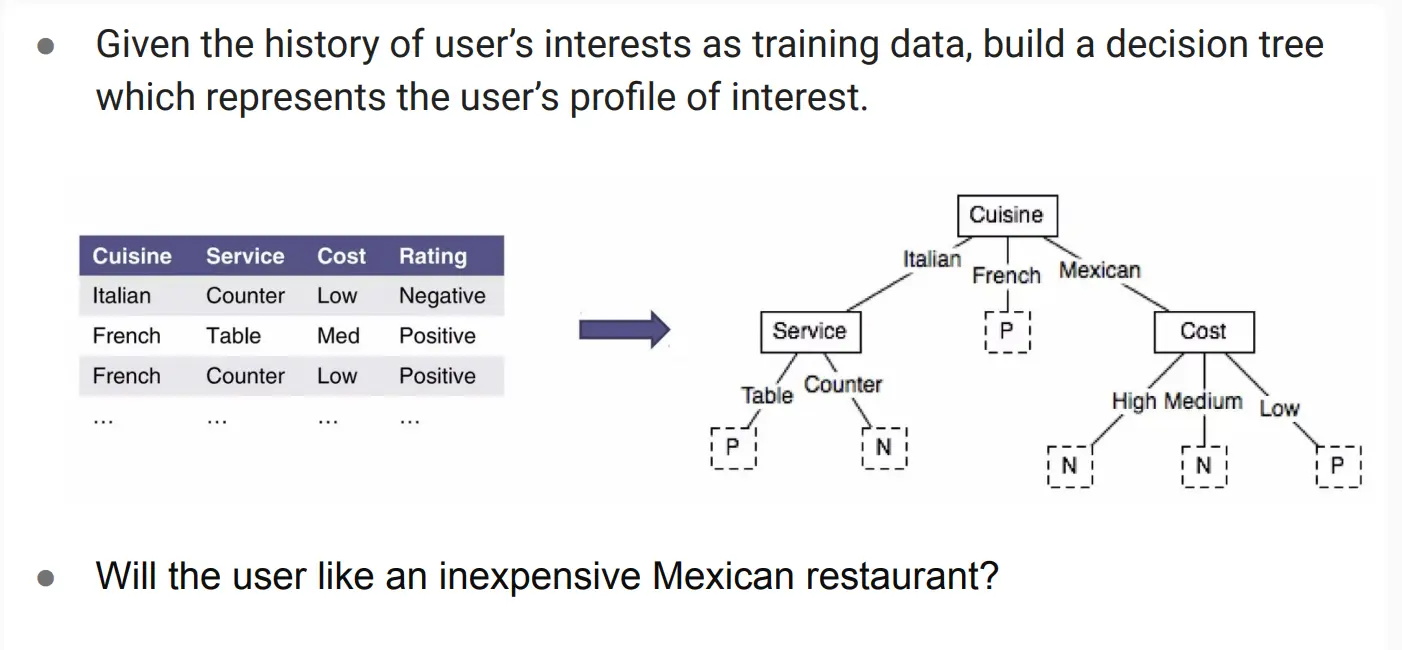 优点:可解释性强,可以融合专家知识,然而,如果面对非结构化数据,比如面对TF–IDF 的上万维词向量,可能就会导致树的深度爆炸。 我们一般用用元特征替代原始文本,在文本场景下,先抽取“meta features”——比如作者(Author)、流派(Genre)、出版年份等,再做规则归纳,如用RIPPER算法。
优点:可解释性强,可以融合专家知识,然而,如果面对非结构化数据,比如面对TF–IDF 的上万维词向量,可能就会导致树的深度爆炸。 我们一般用用元特征替代原始文本,在文本场景下,先抽取“meta features”——比如作者(Author)、流派(Genre)、出版年份等,再做规则归纳,如用RIPPER算法。
Content-based 推荐系统劣势
- 仅靠关键词不够全面,质量 ,很多页面只有几句话,关键词极少,难以准确刻画主题;多媒体(图片、视频、音频)中的信息无法自动提取到关键词向量里。 相关性难以度量,
- 冷启动问题
- 过度专一(Overspecialization)算法倾向不断推荐与用户已喜欢内容高度相似的项目,缺少惊喜;难以引入跨领域或长尾内容。
目前推荐系统的趋势
- 个性化,结合用户的实时偏好、长期画像,提供高度定制化的推荐。
- 可解释 AI
- 上下文感知推荐(Context-Aware Recommendations):将 时间(早中晚)、地点(室内/室外、城市/乡村)、社交环境(与你好友的互动)等上下文信息纳入模型,使推荐在不同场景下更贴切。
- 多方利益相关者推荐:除了关注用户,还要兼顾内容创作者和平台方的需求——平衡用户满意度、作者曝光度与平台盈利。
- 伦理与隐私
研究方向:
- 强化学习在推荐中的应用
- 长期用户建模
- 混合推荐系统
- 新型推荐范式
- 公平性与偏见
Week 9 Markov Decision Processes
动机问题
某病症Q的患病率是1% 如果患病,那么检测为阳性的概率为90% 如果没患病,仍有9%的假阳性概率 那么结果为阳性的时候,患病的概率为多少? P(Q) = 0.01 P(阳|Q) = 0.9 P(阳|非Q) = 0.09
那么医疗建议部门应该给出什么建议呢? 这几个哪个对?
- The probability that they have disease Q is about 8%
- 错了,上面计算
- Out of 10 people with a positive test, about 9% have disease Q.
- 也不对,首先没有0.9个人
- Out of 10 people with a positive test, about 1 has Q.
- 这个就对了。如果1000人筛查,那么会有1000 * 0.01 * 0.9 + 1000 * 0.99 * 0.09 = 98, 其中9真阳,89假阳
- 其实上面已经算好概率了,就是9.2%的患病率。
- The probability that they have Q is about 1%
- 错上加错
但是上面这些都是真实人类说出来的话。所以我们知道,人在概率推理上往往表现很差,需要一个真实的场景(Natural Frequencies)才能正确表述出来。 启示:用Natural Frequencies替代概率为人们展示信息。 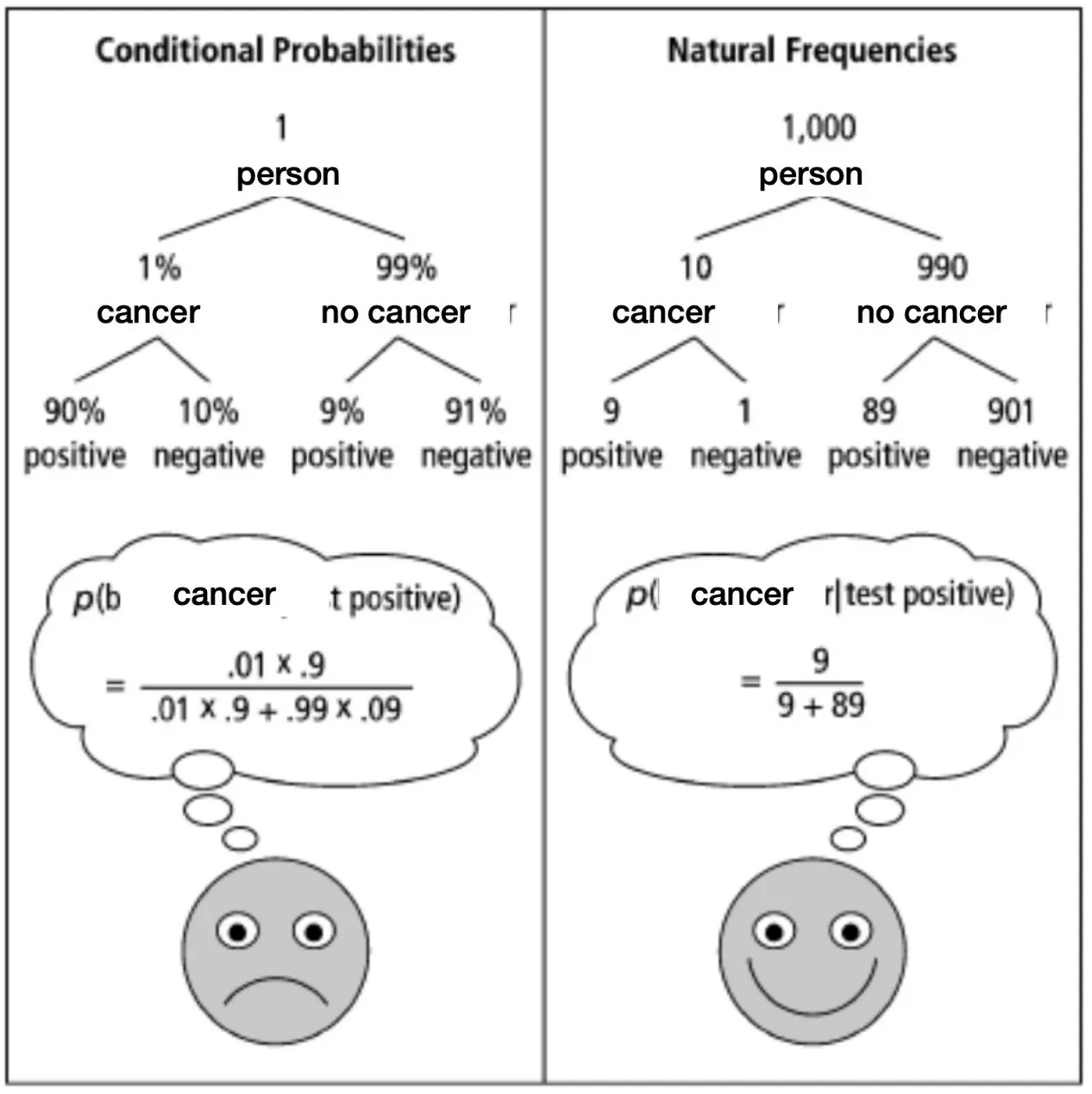
贝叶斯定理
马尔可夫链
我们曾在 11 - Language Modeling 中提到过马尔可夫过程,一阶的马尔可夫就是说忽略前置一切状态,只根据当前的状态就能预测下一状态。核心特点就是 “无后效性”(Markov 性):下一时刻的状态只依赖于当前状态,而与更久远的历史无关。状态无关。
实际上,马尔可夫链依旧是有限状态机。有一系列节点,是状态集合S,只不过,把原来确定性的状态转移方程,变成了转移概率分布P(s_new|s)。 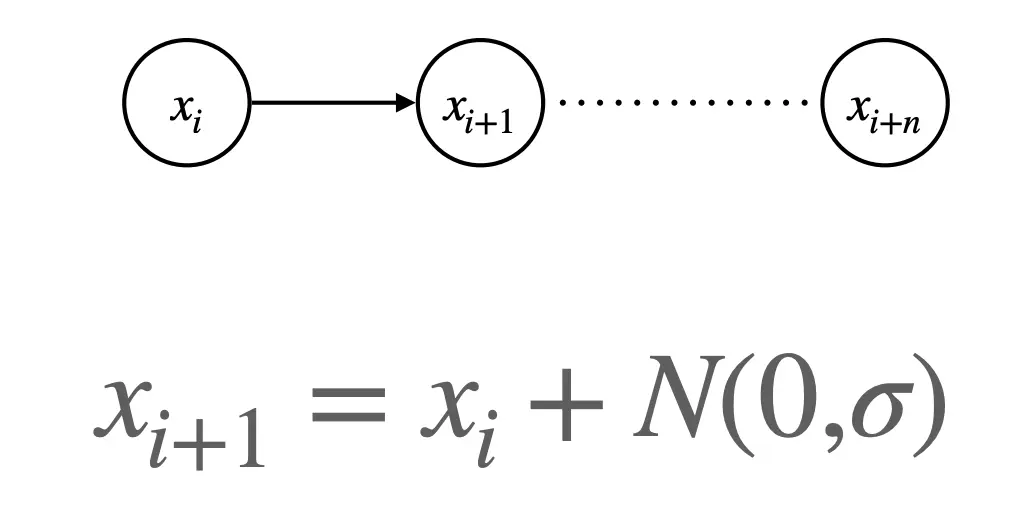 这个玩意描述了一个随机走动,或者布朗运动,每一步在当前值基础上加一个均值 0、方差sigma2的高斯噪音。下一步的增量只依赖于当前状态,符合马尔可夫性。
这个玩意描述了一个随机走动,或者布朗运动,每一步在当前值基础上加一个均值 0、方差sigma2的高斯噪音。下一步的增量只依赖于当前状态,符合马尔可夫性。 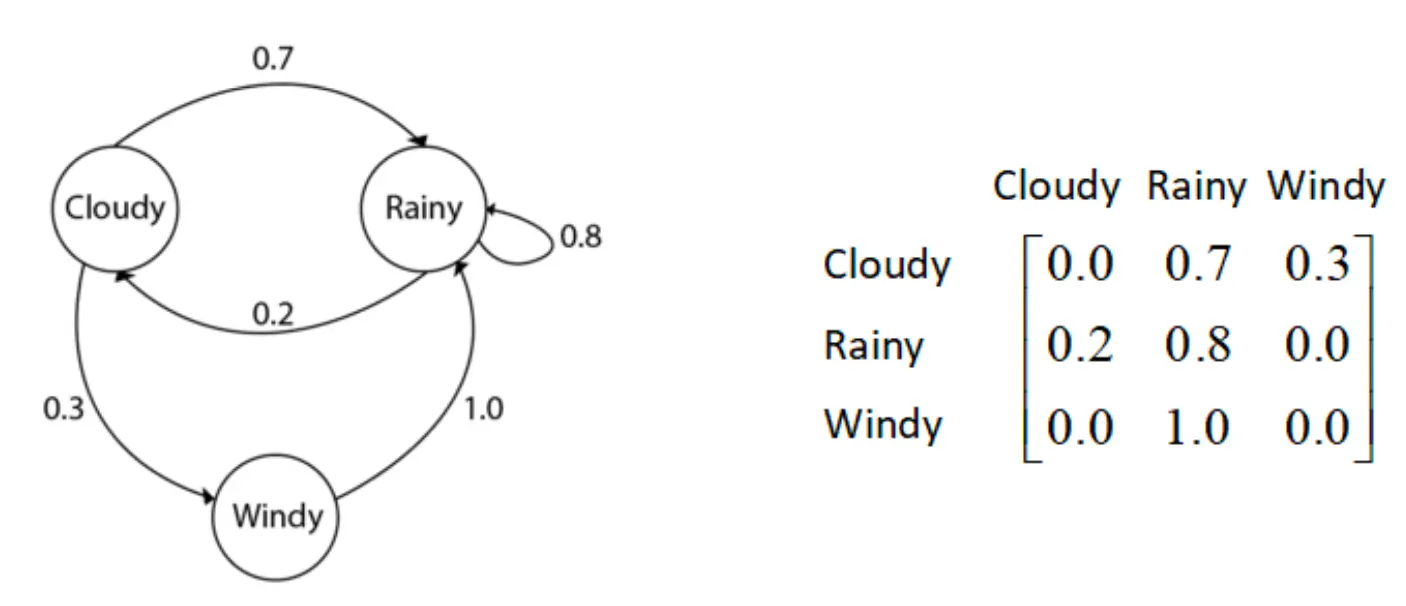 这个就很好理解,是一个气候的马尔可夫链。
这个就很好理解,是一个气候的马尔可夫链。 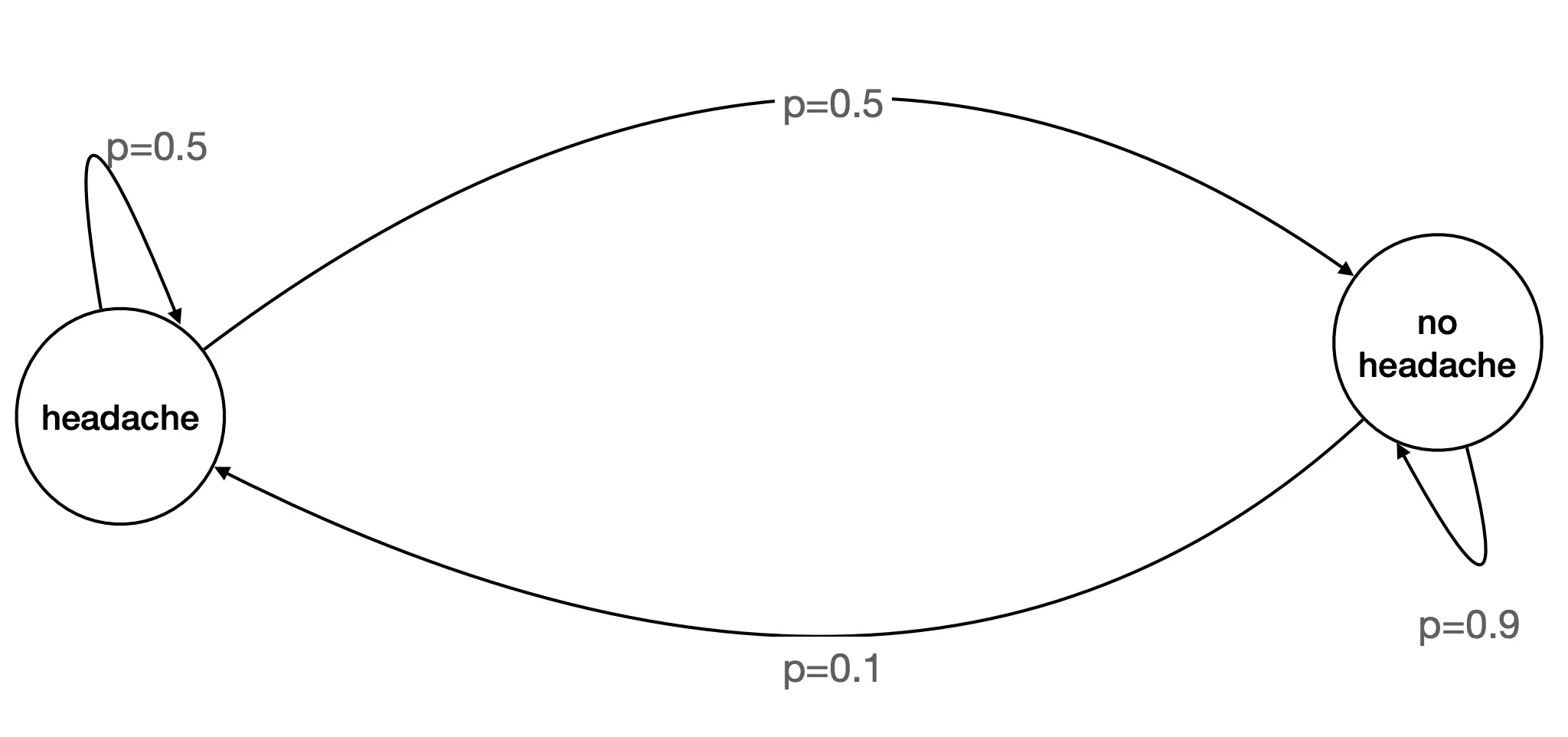 这个是一个生病头疼的马尔可夫链。
这个是一个生病头疼的马尔可夫链。 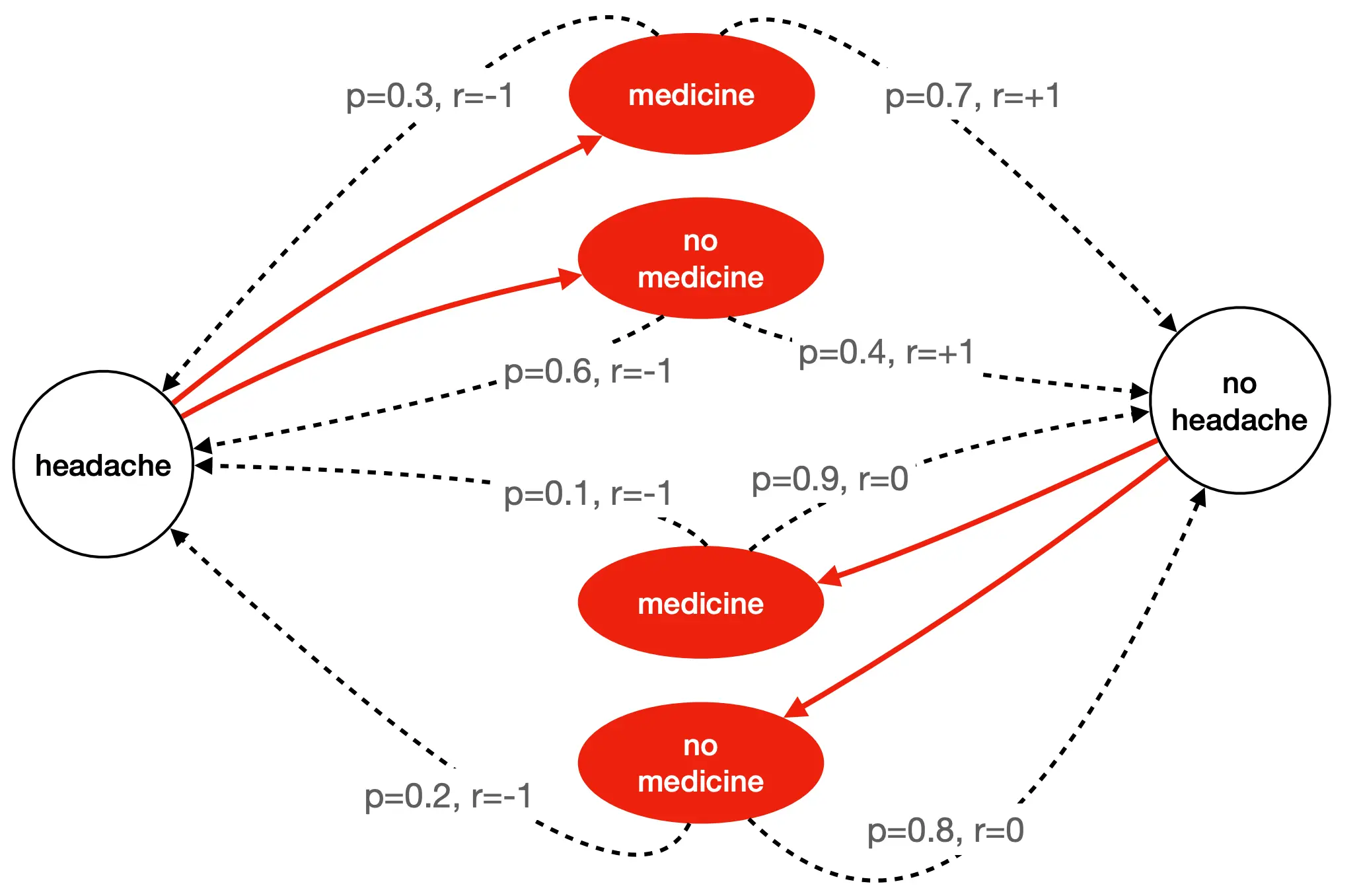 这是一个涉及Action的马尔可夫链 其中红色的是Action,动作的选择是由“策略”决定。这个图怎么看?headache的情况下,如果选择服用medicine,那么有0.7的概率获得正奖励(r = +1),变为不头疼,但是也有0.3的概率得到负奖励,也就是继续头疼或者出现副作用。如果不头疼的情况下吃药,那么0.9的概率获得0奖励,也就是继续不头疼,还有0.1的概率获得负奖励(r = -1),变为头疼。 在 MDP 中,我们要做的不只是预测状态,更要选择动作以最大化累计奖励。 𝑃 ( 𝑠 ′ ∣ 𝑠 , 𝑎 )告诉你“不同行动下会如何转移”, 𝑟 ( 𝑠 , 𝑎 , 𝑠 ′ )告诉你“这次转移值不值得”。
这是一个涉及Action的马尔可夫链 其中红色的是Action,动作的选择是由“策略”决定。这个图怎么看?headache的情况下,如果选择服用medicine,那么有0.7的概率获得正奖励(r = +1),变为不头疼,但是也有0.3的概率得到负奖励,也就是继续头疼或者出现副作用。如果不头疼的情况下吃药,那么0.9的概率获得0奖励,也就是继续不头疼,还有0.1的概率获得负奖励(r = -1),变为头疼。 在 MDP 中,我们要做的不只是预测状态,更要选择动作以最大化累计奖励。 𝑃 ( 𝑠 ′ ∣ 𝑠 , 𝑎 )告诉你“不同行动下会如何转移”, 𝑟 ( 𝑠 , 𝑎 , 𝑠 ′ )告诉你“这次转移值不值得”。
马尔可夫链的形式化定义:
- 状态集S
- 动作集A
- 转移函数 p(s_new | s, a):在s状态下采取动作a后转移到s_new的概率
- 奖励函数r = R(s'|s),转移所获得的标量奖励。
代理-环境框架
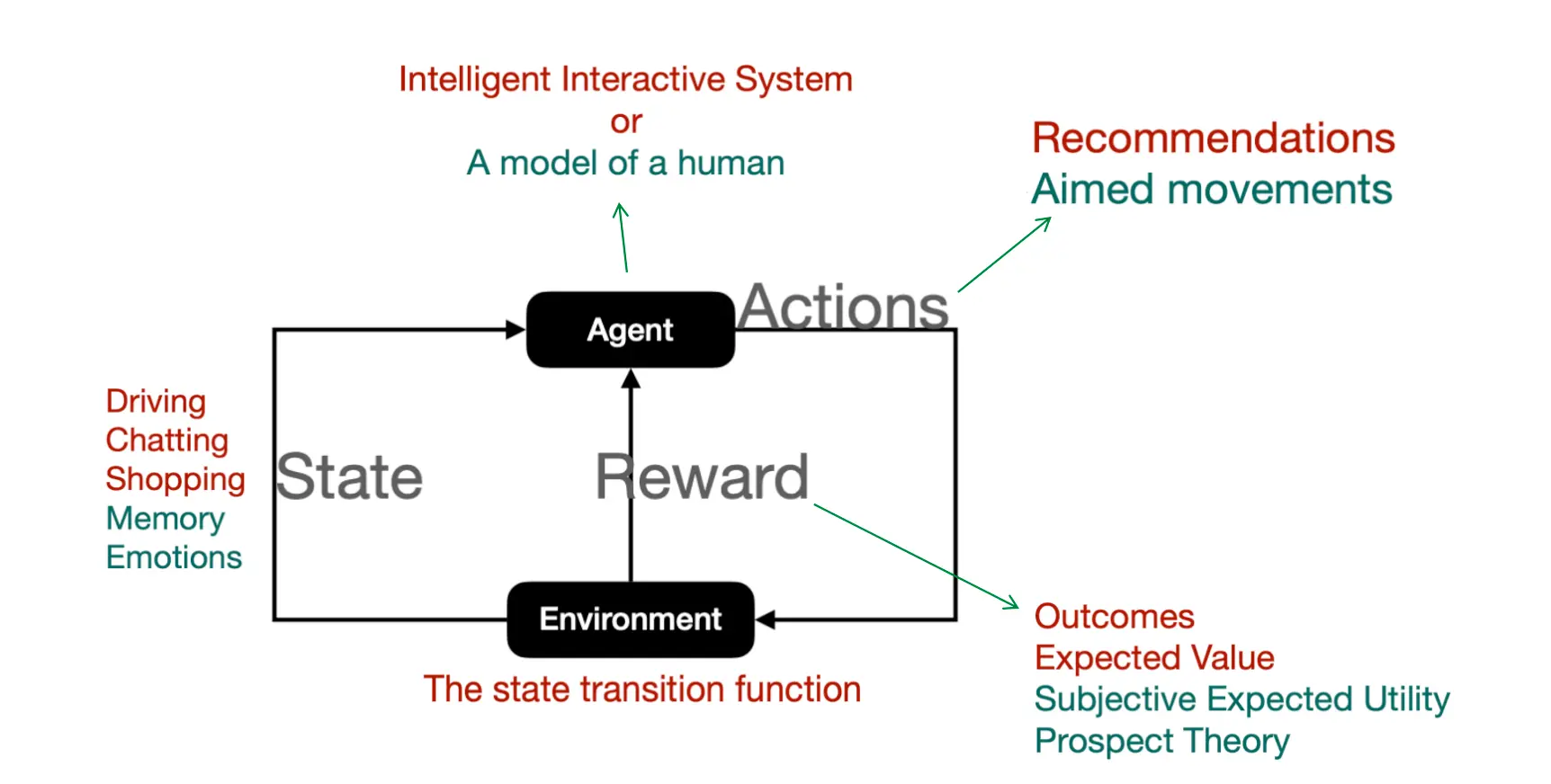 代理在上一个State的影响下选择Actions,影响新环境,得到Reward。 一个人,推荐系统在上一个state的基础上推荐采取一个action,得到新环境,以及根据主管效用 / 前景理论获得的Reward。
代理在上一个State的影响下选择Actions,影响新环境,得到Reward。 一个人,推荐系统在上一个state的基础上推荐采取一个action,得到新环境,以及根据主管效用 / 前景理论获得的Reward。
一个策略例子 - 贝尔曼方程
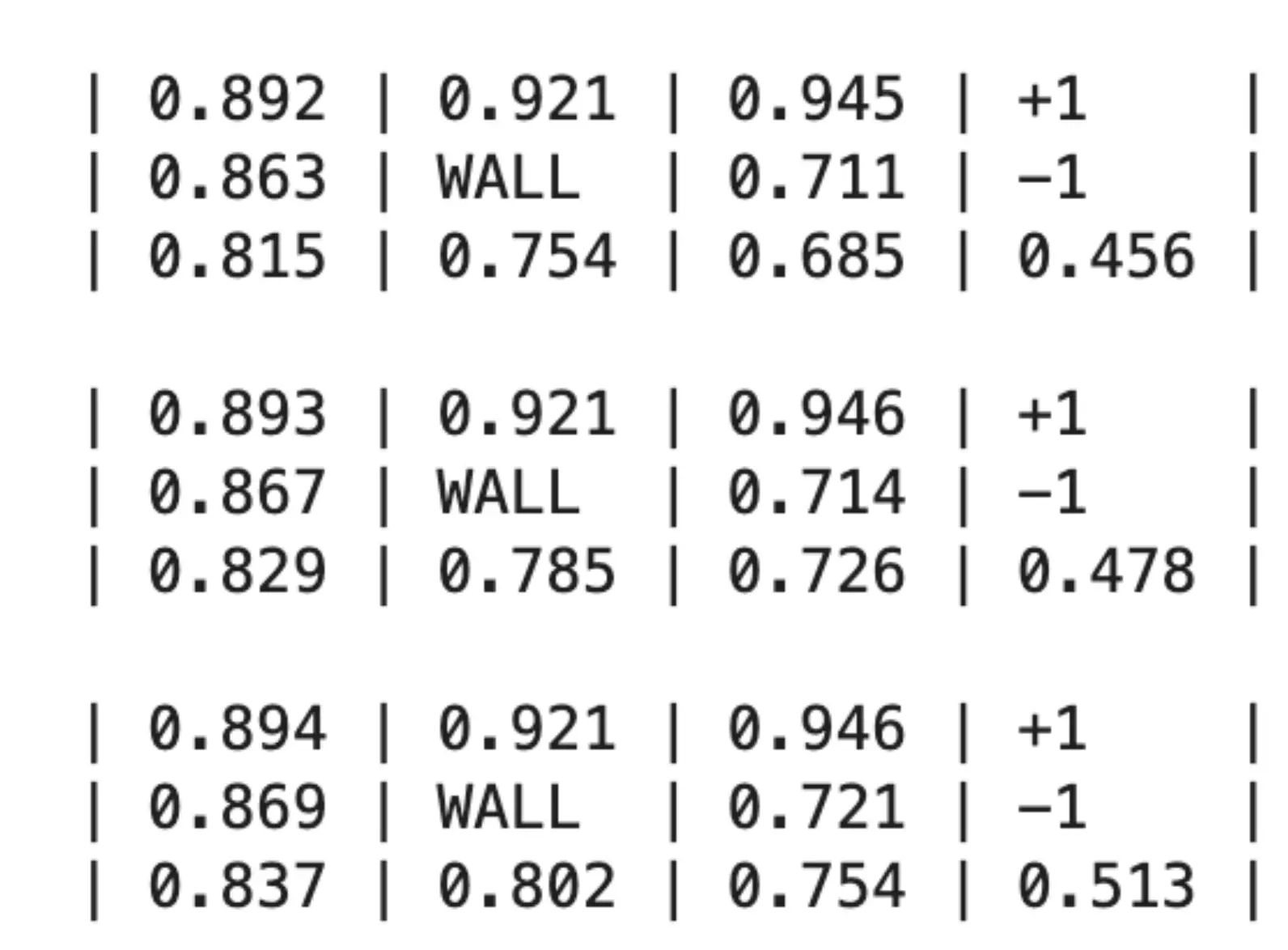
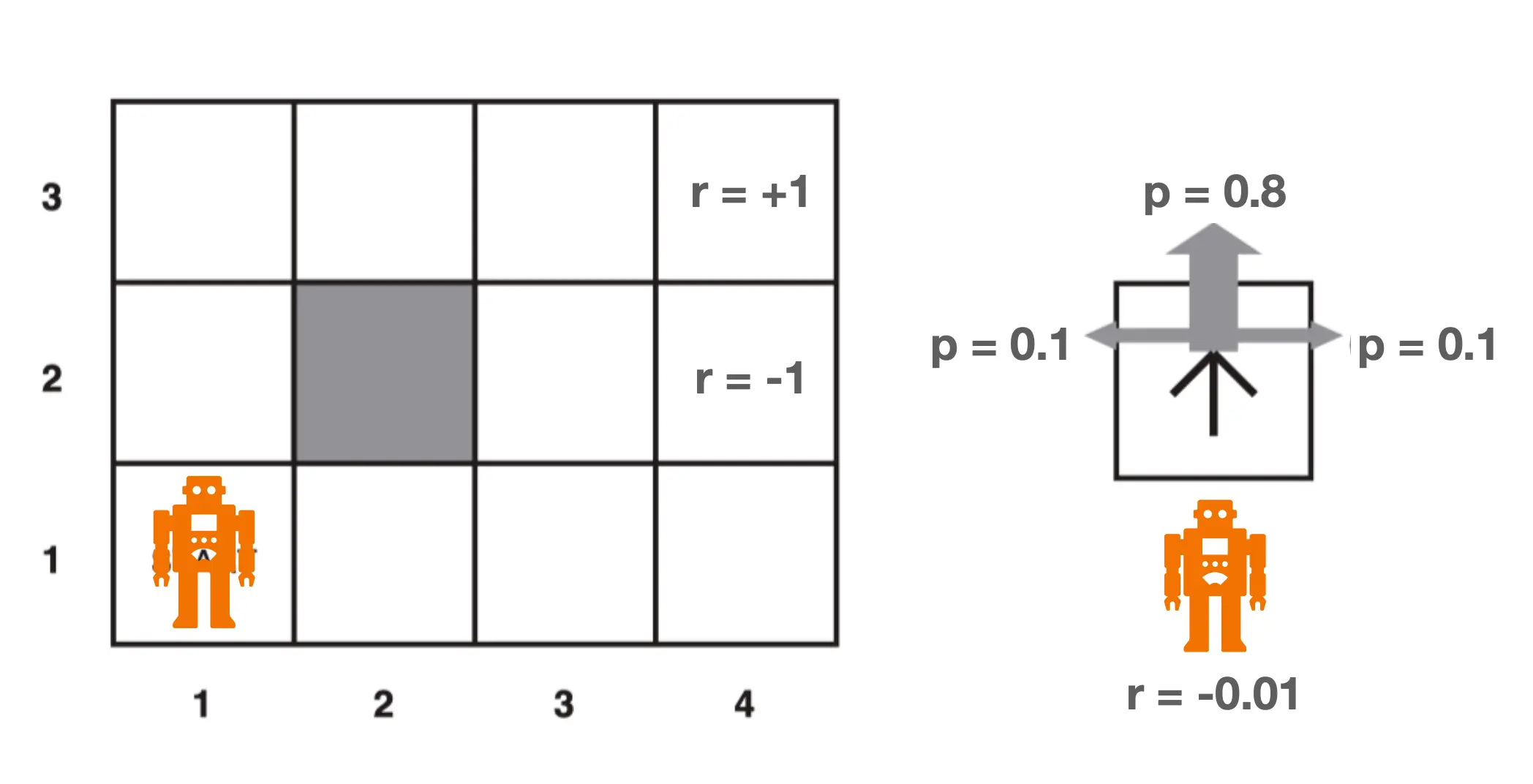 动作是随机的: 即使你指定的策略是向上,那0.8的概率朝上,但仍有10%的概率朝左朝右,这是为了模拟真实场景,比如说有风。 每跨一步 r -= 0.01
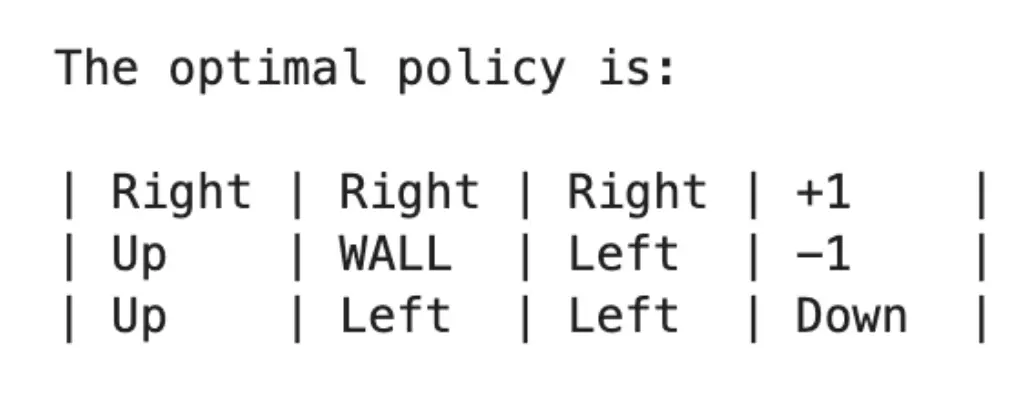
动作是随机的: 即使你指定的策略是向上,那0.8的概率朝上,但仍有10%的概率朝左朝右,这是为了模拟真实场景,比如说有风。 每跨一步 r -= 0.01 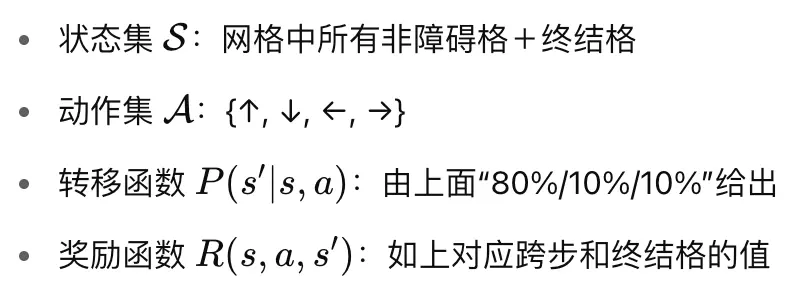 那么我们可以给出最优policy pi_star:
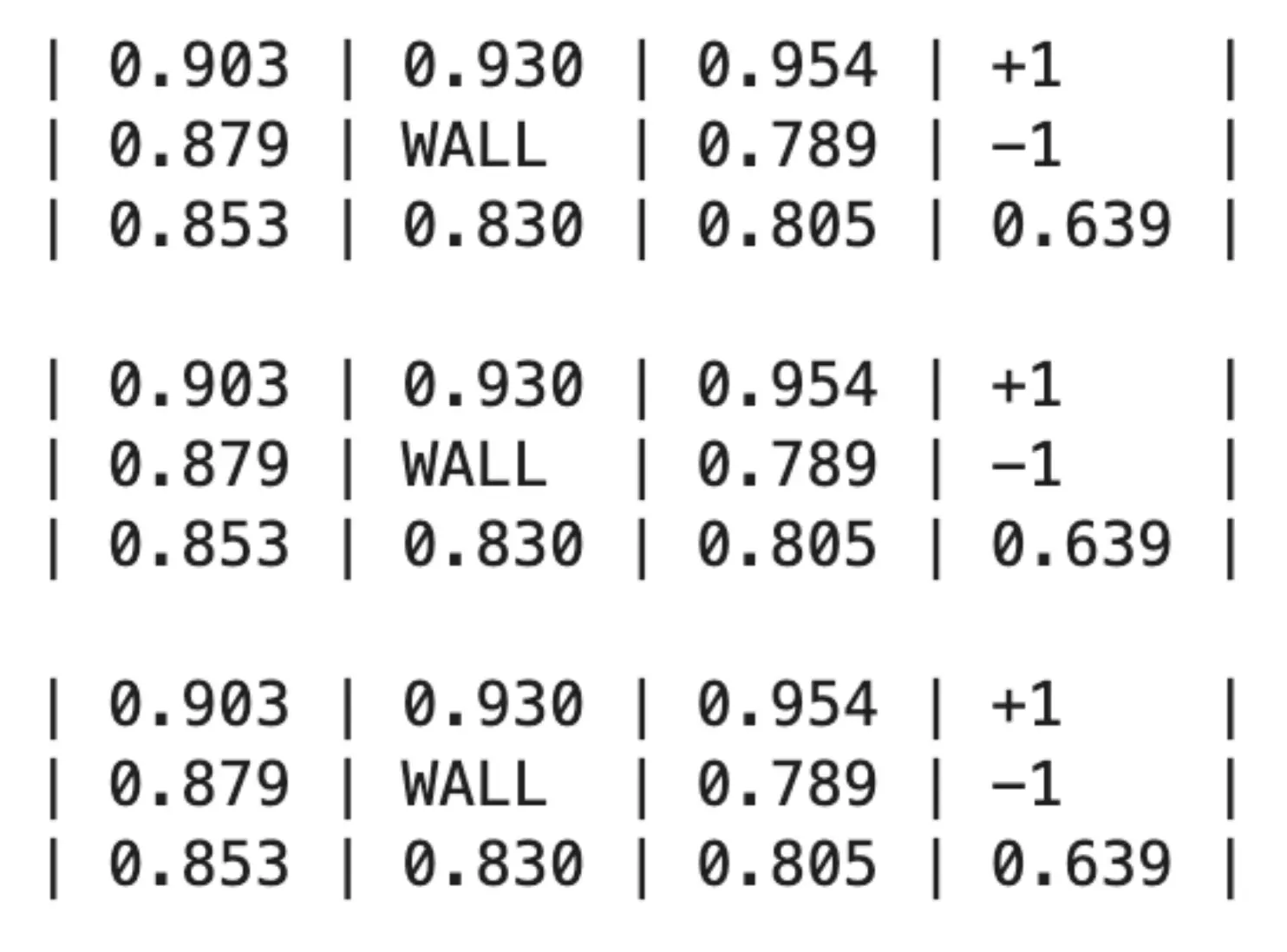
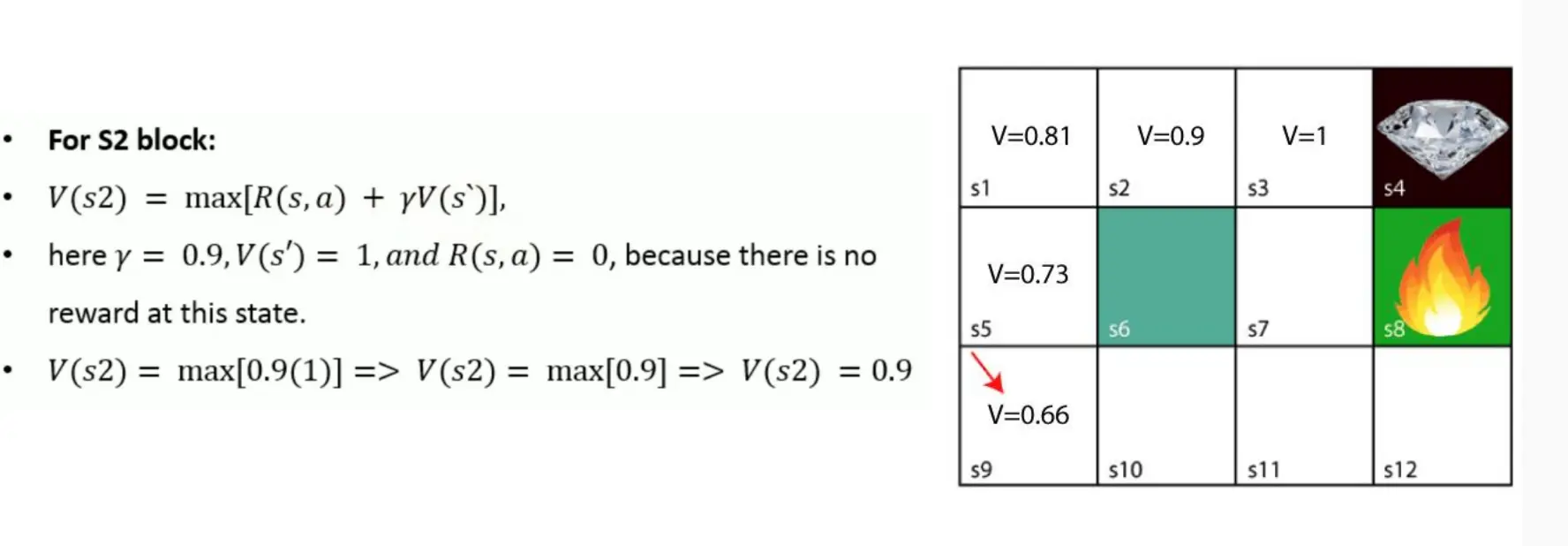
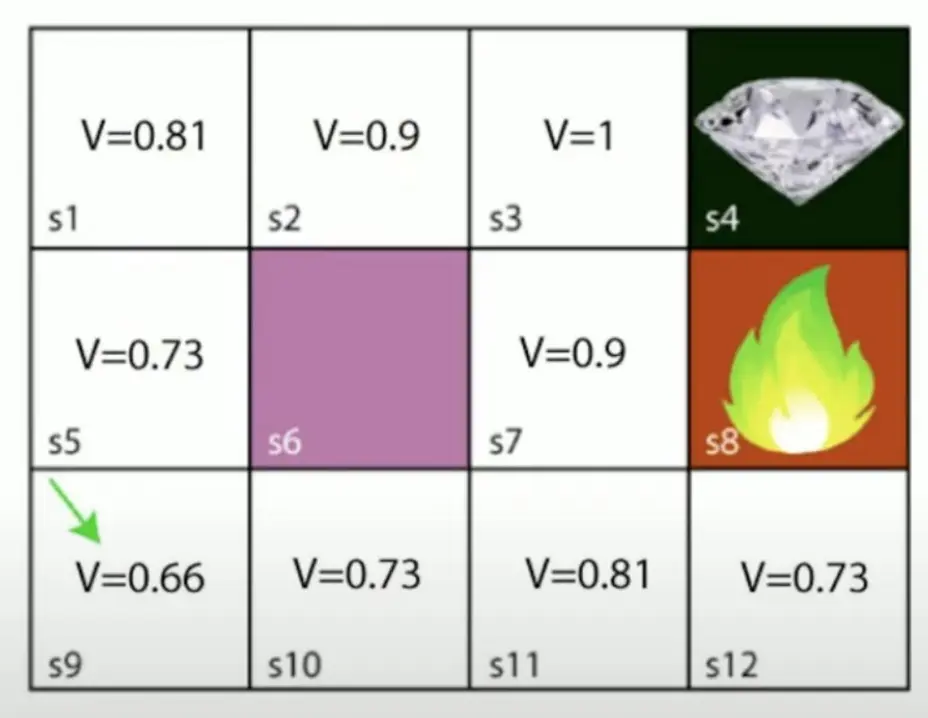
那么我们可以给出最优policy pi_star: 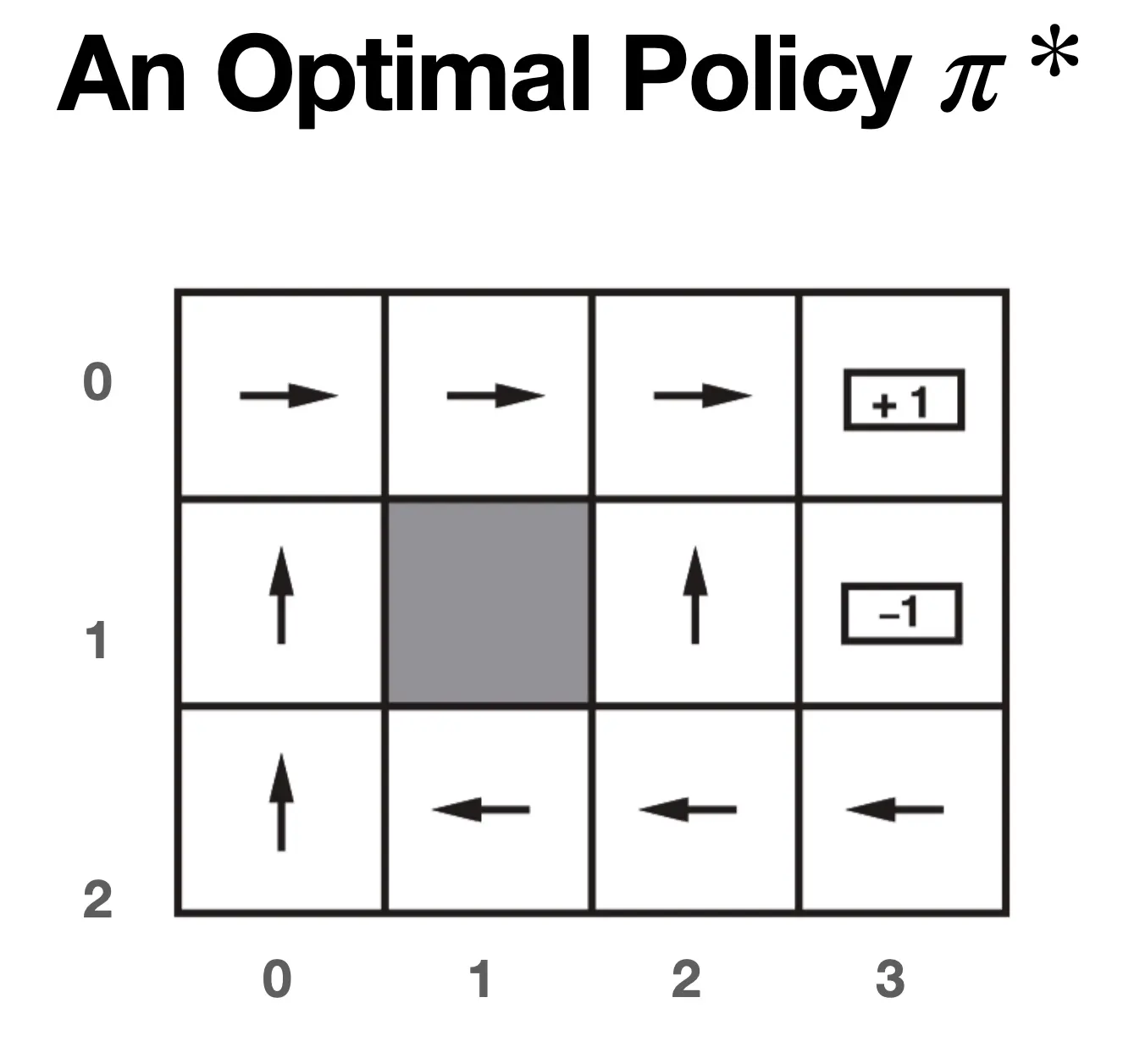 我们如何计算在最优策略π下的最优Value是多少呢?可以用最优贝尔曼方程来建模:
我们如何计算在最优策略π下的最优Value是多少呢?可以用最优贝尔曼方程来建模: 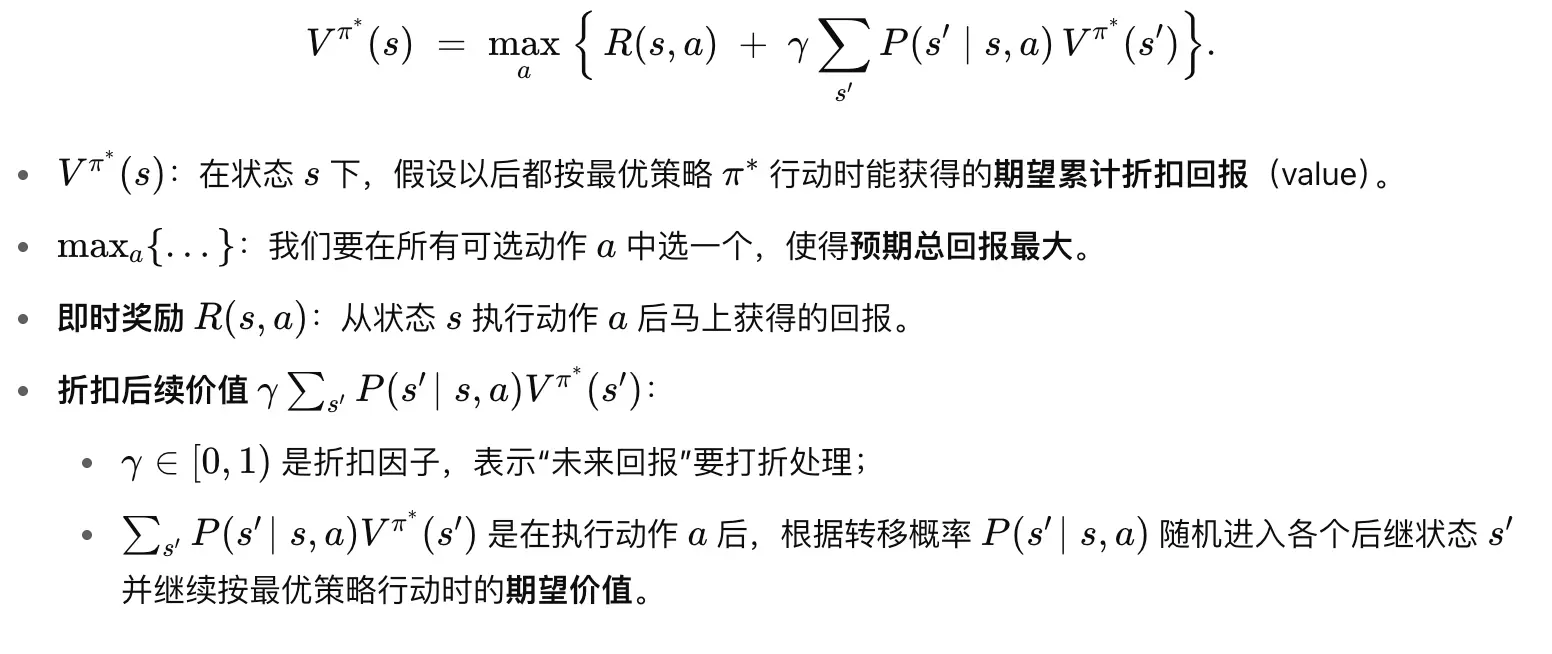 对于这个例子,就是(V和U混用了,应该用V):
对于这个例子,就是(V和U混用了,应该用V): 
确定最优策略的算法
- Value iteration :一会讲
- Policy iteration:评估阶段:给定策略pi,用贝尔曼期望方程算Vpi,改进阶段:用Vpi算出贪心策略pi_new,再回去评估,循环往复。
- Q-learning:一种经典的无模型(model-free)离线强化学习算法,通过与环境交互直接学习动作—价值函数Q(s,a), 无需事先知道状态转移方程P以及及时奖励R。
- Reinforcement Learning (RL),广义范畴,指所有通过与环境反复交互、试错学习最优策略以最大化长期累积奖励的方法。Q-learning、蒙特卡洛方法、时序差分(TD)学习、策略梯度等。
- Deep Reinforcement Learning (DRL),在强化学习框架下,用深度神经网络来近似状态值函数V(s),动作值函数Q(s,a)或策略pi(a|s),如DQN、Deep Deterministic Policy Gradient (DDPG)、A3C/A2C、PPO。
- Proximal Policy Optimisation (PPO):把「最大化期望累积回报」写成一个可微的目标函数,通过梯度上升(或近似信赖域方法)直接优化策略参数。
Value Iteration
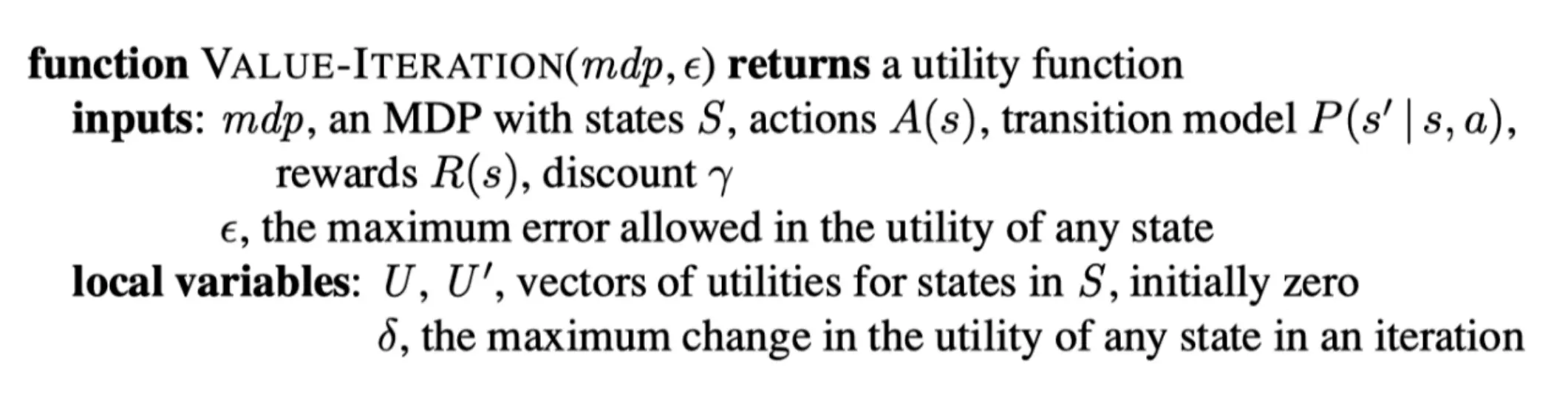 这个事Value Iteration的函数签名。 它的输入为: 常见的mdp,以及discount gamma,ε:允许的最大误差阈值,用来控制收敛条件。 本地变量:U, U', 长度为S的向量,分别存储“上一次”和“本次”对每个状态的估计效用(utility),初始都设为 0。 δ:记录每轮迭代中任意状态效用更新的最大变化量(max change)。
这个事Value Iteration的函数签名。 它的输入为: 常见的mdp,以及discount gamma,ε:允许的最大误差阈值,用来控制收敛条件。 本地变量:U, U', 长度为S的向量,分别存储“上一次”和“本次”对每个状态的估计效用(utility),初始都设为 0。 δ:记录每轮迭代中任意状态效用更新的最大变化量(max change)。
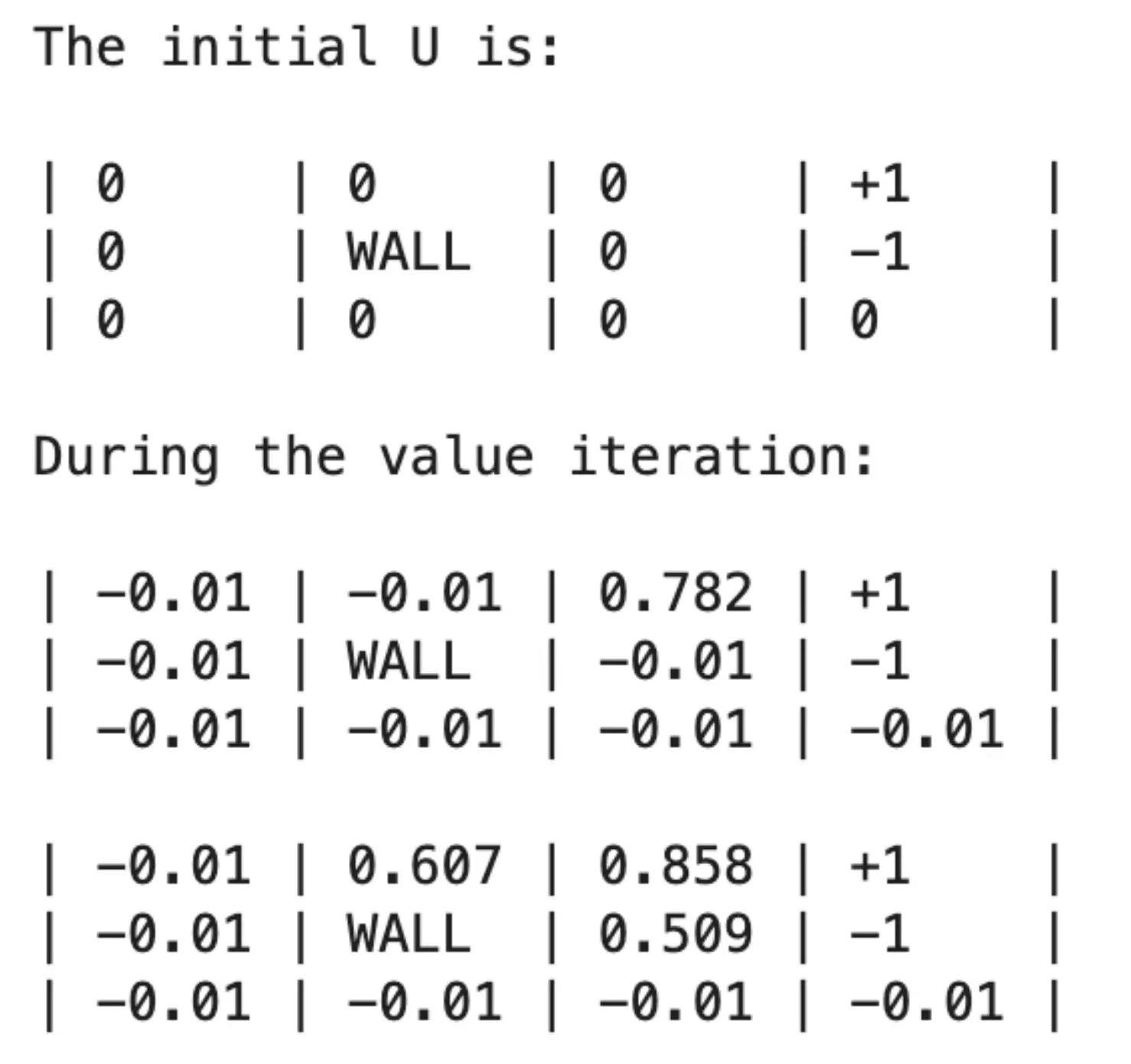
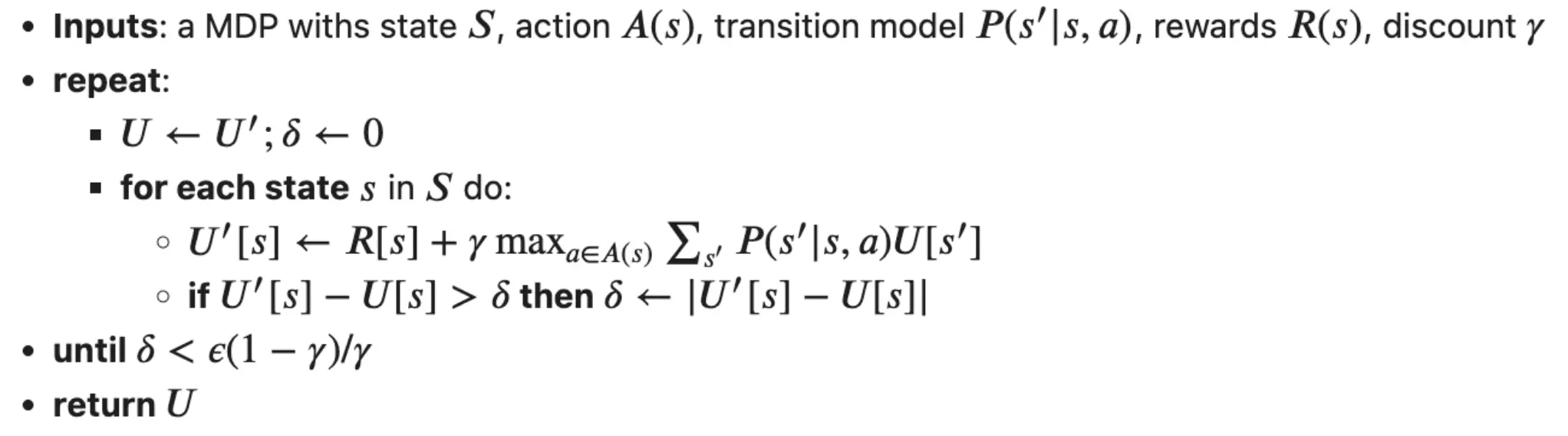 过程,先将所有格子都设为0,然后对每个点进行一次bellman 备份迭代(这并不是贝尔曼方程!不递归!):
过程,先将所有格子都设为0,然后对每个点进行一次bellman 备份迭代(这并不是贝尔曼方程!不递归!):
然后计算变化量 |U'(s) - U(s)|,delta,则更新若大于当前。 整轮过后,若最大变化量 δ小于收敛阈值,则循环结束。 我们是在用bellman 备份迭代,去逼近bellman最优方程!这用到了不动点定理,是一个数学证明,反正是可以逼近的。
总结
- 马尔可夫链仅仅描述了随机过程,并没有建模决策。如果要建模人类决策过程,可以用MDP。
- MDP用S,A,P,R来定义决策问题
- 动作的选择代表着意图,意图的结果可能不确定
- 贝尔曼方程通过及时奖励和未来奖励的综合来定义决策价值
- 价值迭代算法可以用来找到最优策略
- 最优策略有可能反直觉
MDP的应用
首先回顾MDP的组成: 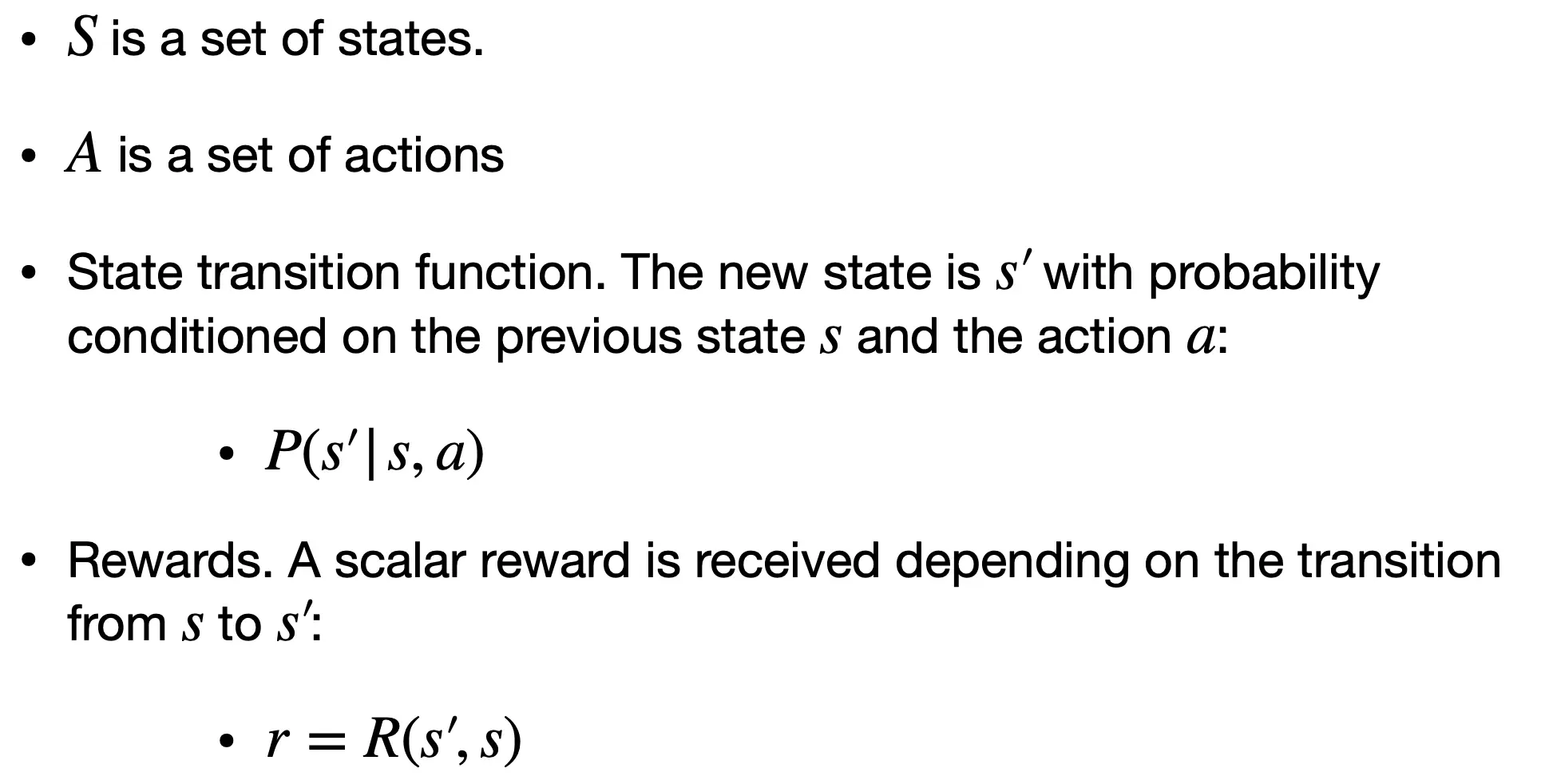 贝尔曼方程
贝尔曼方程 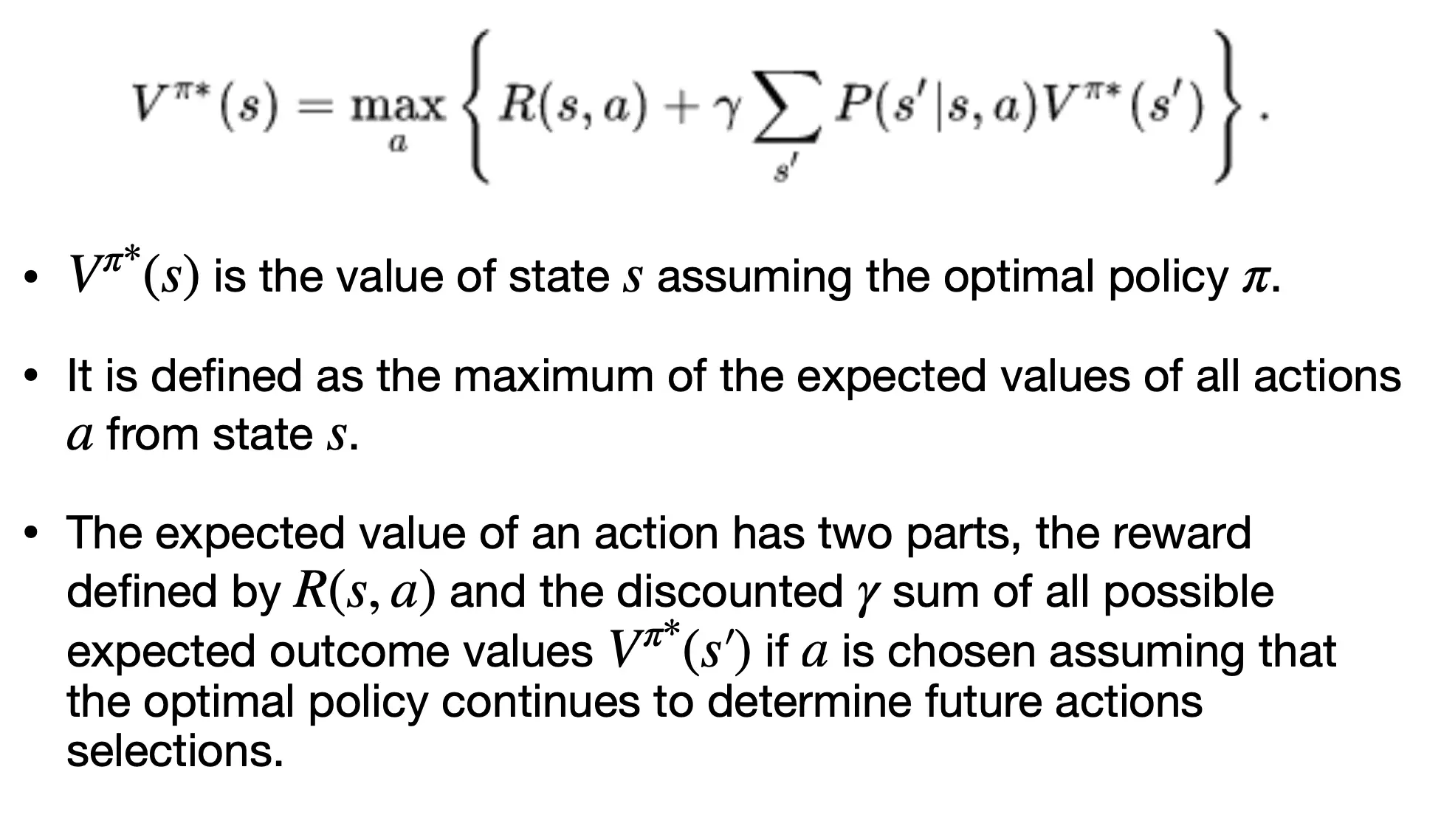
肝移植MDP
14 种不同的肝源类型,18 个病人健康状态,30 个器官质量排名级别。 如果不用MDP而用决策树,就会有18 × 14 × 30 = 7,560 个节点的决策树。 权衡: 等待带来的风险:病人可能在等待过程中病情恶化(MELD 分数 ↑)或好转(MELD 分数 ↓),也可能直接死亡。 过早接受移植带来的代价:虽然能避免“等待死亡”的风险,但术后肝脏的使用寿命有限(通常 10–20 年),而且手术风险和术后并发症也与患者当前健康状态密切相关。
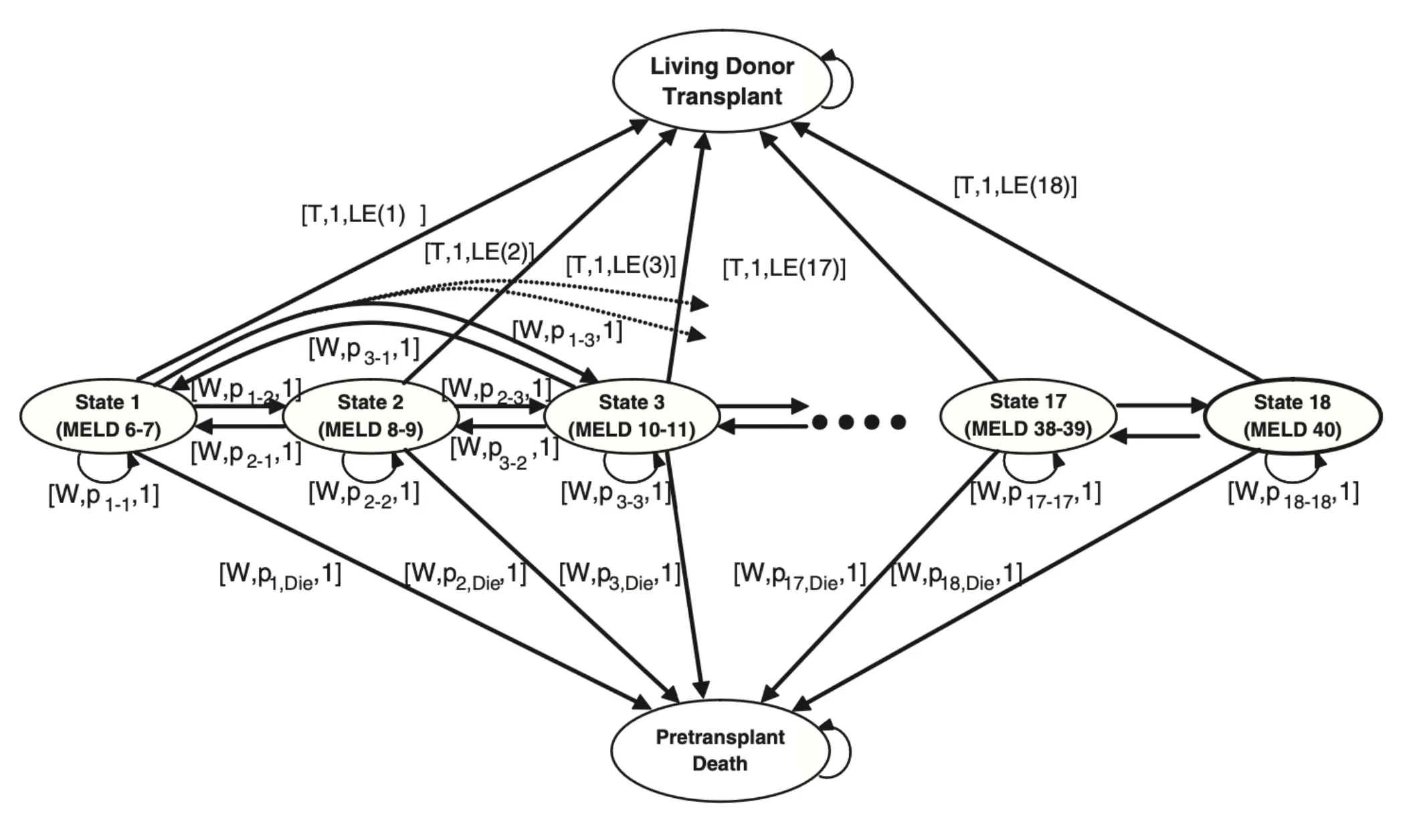 横向的是健康状态,上面是接受供肝后的状态,下面是等待过程中因病逝世的终止状态。 W是等待,T代表移植,LE代表预期寿命。每个健康状态下“等待”与“接受供肝”两条主要策略分支,以及它们各自的转移概率和获益(生存期)。
横向的是健康状态,上面是接受供肝后的状态,下面是等待过程中因病逝世的终止状态。 W是等待,T代表移植,LE代表预期寿命。每个健康状态下“等待”与“接受供肝”两条主要策略分支,以及它们各自的转移概率和获益(生存期)。
糖尿病MDP
对于状态空间,里面有:
分别为:慢性并发症,急性并发症,严重风险标志,已确诊糖尿病年份,等。
对于行为空间,里面有:  对于状态转移函数,这是由真实数据决定的。清洗后 69 000 名真实患者的年度随访轨迹,之后进行了归一化。
对于状态转移函数,这是由真实数据决定的。清洗后 69 000 名真实患者的年度随访轨迹,之后进行了归一化。
对于Reward,采用了QALY(质量调整生命年),每年获得的健康效用减去用药成本 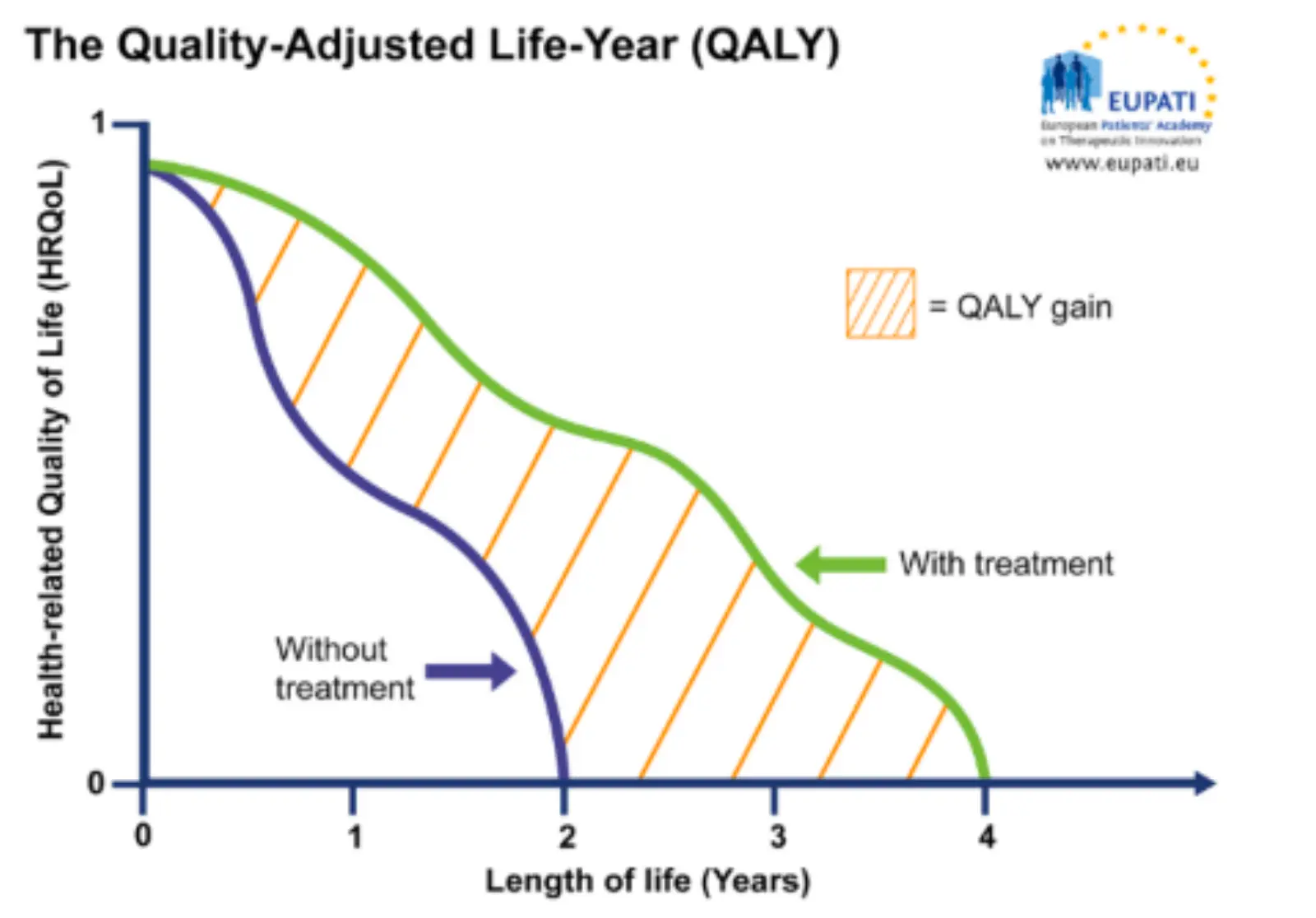
前半项:折算后的 QALY(考虑四类健康折减)× 社会支付意愿,后半项:该药物组合的直接成本 + 副作用等额外损失。
结果: 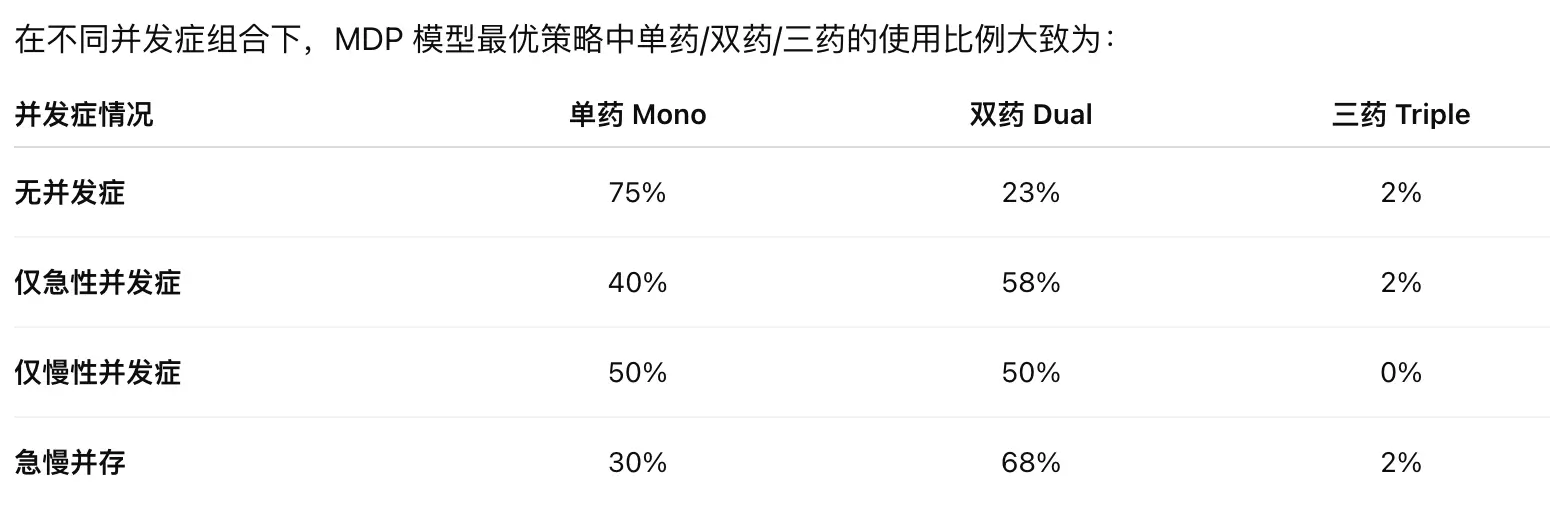
情景感知MDP
情境感知(Situation Awareness, SA)各种因素如何共同作用,影响飞行机组(Crew)的决策和操作(Crew Actions)。有各种各样的影响。 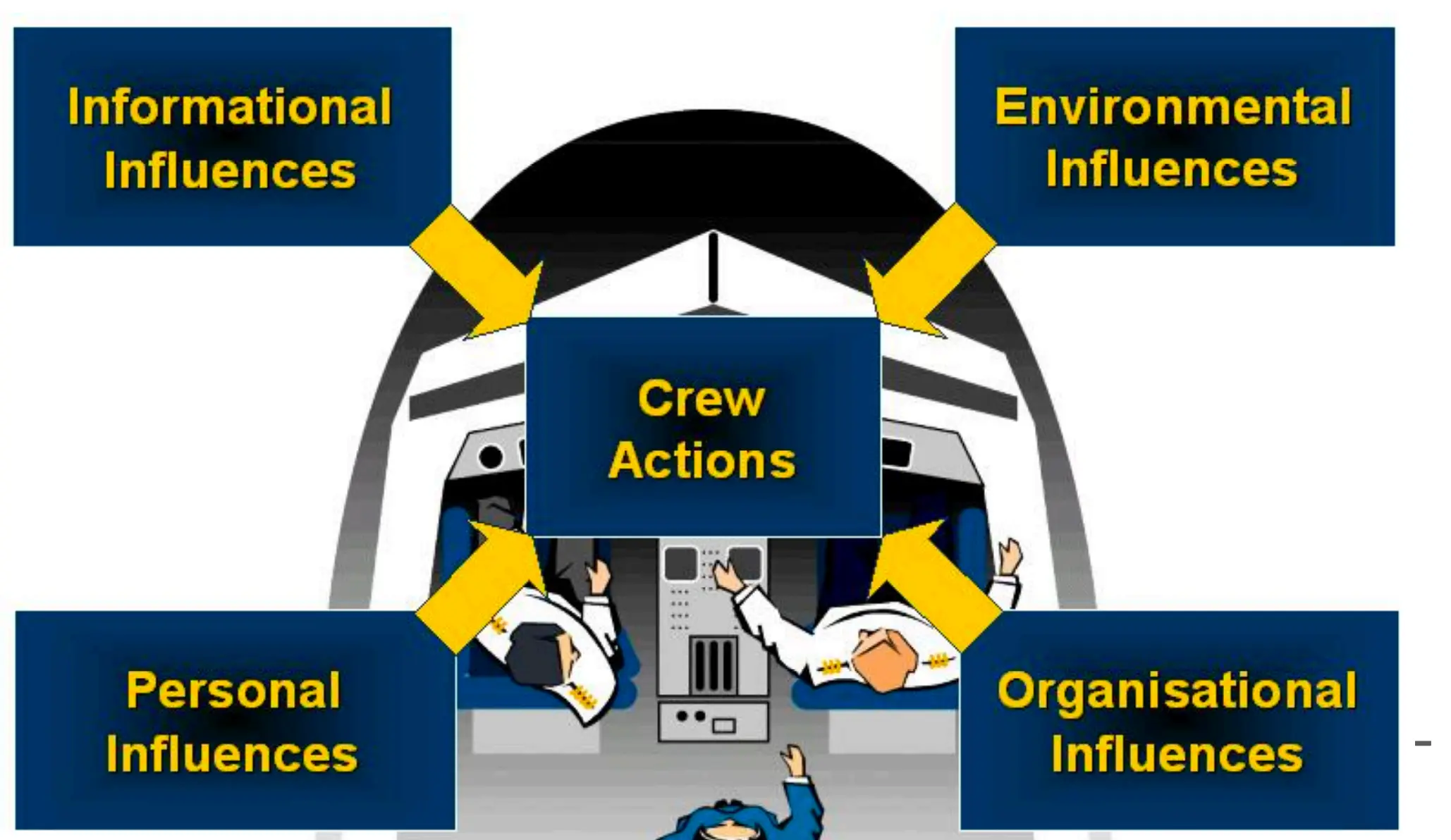 飞行员飞行中必须保持情境意识的关键要素:
飞行员飞行中必须保持情境意识的关键要素:
- 飞行状态(Status),包括飞机的空速、飞行高度、航向、燃油剩余量
- 地形(Terrain)
- 天气(Weather)
- 空中交通(Air Traffic)
- 导航(Navigation)
- 飞行计划,人为因素,飞机和机组能力(Aircraft and crew capabilities)
传统中,飞行员根据眼动来维持情景意识,优秀机师通过合理分配注视时间和扫描路径,来不断地从多个视野(外部与多套仪表)中收集信息,从而维持高水平的情境意识。 
 我们希望有一个模型,预测最佳的眼动模式,帮飞行员维持高的情景意识,用于飞行员的训练,以及飞机设计等。 我们希望用MDP建模,有两个假设:
我们希望有一个模型,预测最佳的眼动模式,帮飞行员维持高的情景意识,用于飞行员的训练,以及飞机设计等。 我们希望用MDP建模,有两个假设:
- 假设 1:眼动是一个不确定环境下的多阶段决策过程
- 假设 2:有经验的操作者会遵循“最优策略”规划眼动序列 核心概念:
- AOI(Area Of Interest,兴趣区):驾驶舱内被划分出的若干功能区/注视区,例如,飞行显示器(PFD),多功能显示器(MFD),油门杆与发动机状态指示区。
- Fixations(注视)
- Value of an AOI(AOI 的价值),该 AOI 在当前时间点对完成整体子任务(Subtask)的 情境感知收益:比如从 PFD 上读取空速能帮助维持高度控制,从外部视野观察跑道能辅助进近判断。
- Subtasks(子任务):飞行过程可拆分为若干具体操作目标,如,Check speed:监控与保持目标空速,Check heading:确认与修正航向。
- Relevance of AOIs to Subtasks(AOI 与子任务的关联度),不同 AOI 对不同子任务的重要性是不同的,对“Check speed”而言,PFD 上的空速表高度相关(高关联度),对“Answer ATC”而言,外部视野或听觉类 AOI(如抬头听话筒)更关键。模型里用 关联矩阵 或 概率权重 来量化。
- Bandwidth BW of each AOI(兴趣区带宽),类比通信系统的带宽,指从该 AOI 中接收新信息的“速率”或“容量”。带宽高的 AOI(如电子地图、雷达)能快速提供大量动态信息;带宽低的 AOI(如指针仪表)信息更新较慢。
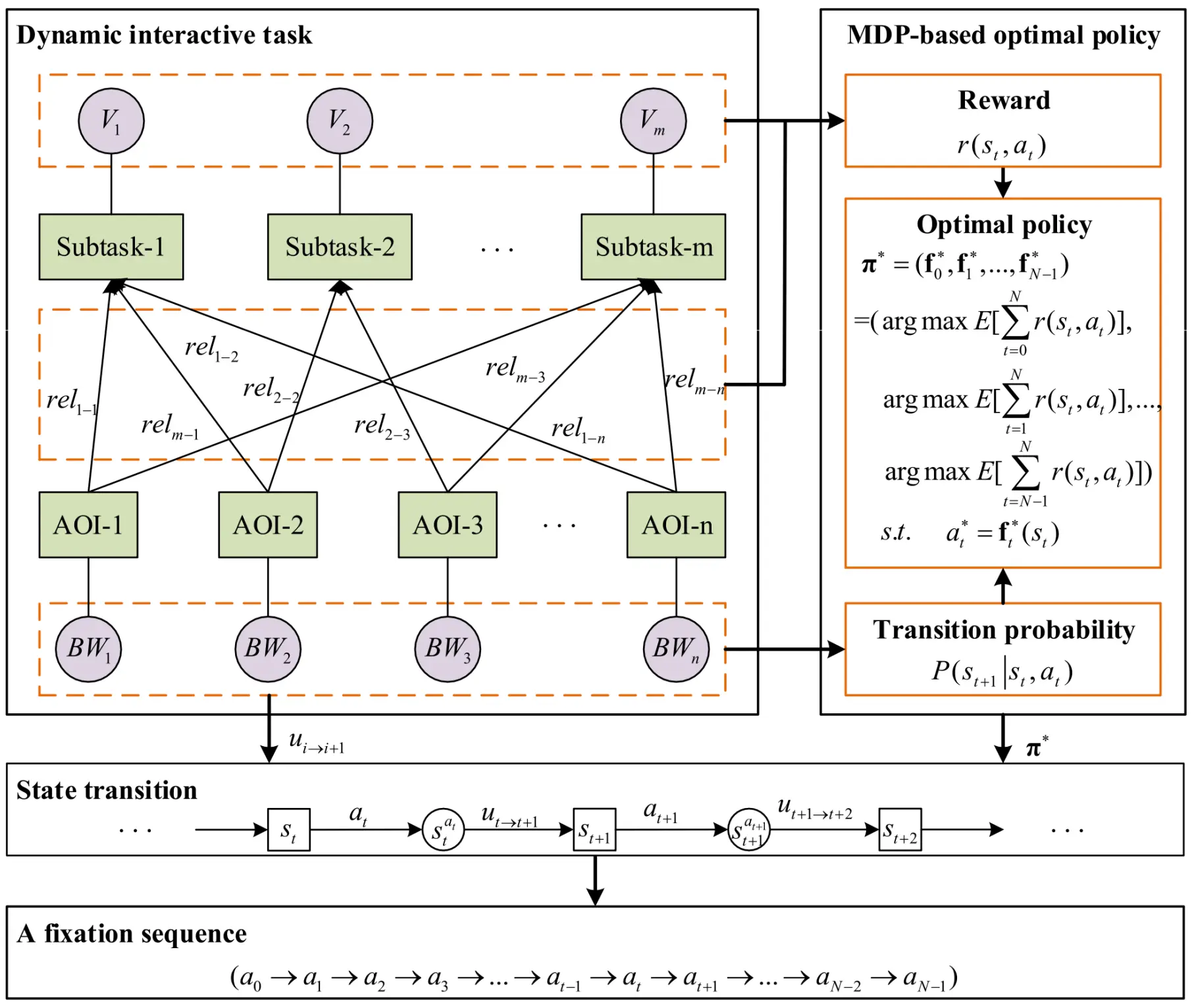 Subtask子任务,V是其对应的AOI价值,Subtask被拆解为不同AOI的关联度,而不同AOI有着不同的带宽。 当视线从一个 AOI 转向下一个 AOI 时(动作 aₜ),各 AOI 会根据其带宽产生随机的信息更新量 u。
Subtask子任务,V是其对应的AOI价值,Subtask被拆解为不同AOI的关联度,而不同AOI有着不同的带宽。 当视线从一个 AOI 转向下一个 AOI 时(动作 aₜ),各 AOI 会根据其带宽产生随机的信息更新量 u。 - 状态 State:包括当前注视所在的 AOI、各子任务未满足的信息量,以及各 AOI 最新的可用信息不确定度。
- 动作 Action:在时刻 t,选择将视线转移到哪一个 AOI 并进行一次注视(fixation)。
- 转移概率 P(sₜ₊₁ | sₜ, aₜ):给定当前状态和注视动作,不同 AOI 的带宽决定了注视后信息更新的随机分布,从而使系统转移到下一个状态。
- 奖励 Reward r(sₜ, aₜ):定义为一次注视带来的 SA(情境意识)增益。 工作流:
- 定义 MDP
- 求解最优策略 π*
- 用 π* 和信息更新函数 u 生成序列。信息更新函数 u 描述了当视线从一个 AOI 转到下一个 AOI 时,每个 AOI 中的信息不确定度如何按其带宽 BW 随机变化。按照 π* 给出的动作选择,从初始状态出发,迭代地应用 “选动作→注视→信息更新”,即可得到一系列状态 s₀→s₁→…→sₙ 以及对应的注视序列 a₀→a₁→…→aₙ。
- 状态 s 对应的 SA 水平。在任一时刻,状态 s(包含了对各 AOI 信息的掌握与否)就可以视作被试(操作员)对当前情境的整体感知程度。
- 状态的向量表示,将状态写成二元向量形式:
这里 n 是 AOI 的总数,每个分量 i_k 表示对第 k 个 AOI 信息的“知觉”情况。ik是二值化的,iₖ = 0:表示对第 k 个 AOI 中必要信息未获得(“unconscious”),即该区域的信息不确定度仍存在。iₖ = 1:表示对第 k 个 AOI 中必要信息已获得(“conscious”),该区域在当前时刻的信息需求被满足。
奖励:把飞行任务的重要性映射到奖励函数里。
- 任务价值(Value of a task),每个子任务(Sub-task)都有一个“先天价值”或“固有重要性”ViV_iVi,用来度量该子任务对整体安全/成功的贡献。比如“保持飞行姿态”比“调节客舱温度”更重要,所以前者的价值 VVV 应该更大。
- 子任务重要性层级(Importance hierarchy)不同子任务并不是平级的,而是存在“优先级顺序”——我们把更重要的任务放在奖励函数里权重更高的位置。
- 航空领域的 ANCS 层级:在飞行操作里,通常采用一个公认的任务优先级框架——ANCS。
- 其他领域的类比:车道保持(lane keeping) 和 道路危害检测(hazard detection) 的重要性高于导航设定(setting GPS) 或 车内娱乐系统操作。奖励函数同样要根据这些领域特有的优先级来分配注视收益。
MDP思考问题
MDP被视为推荐系统,优势和劣势是什么?
优点:
- 建模长期影响。能考虑状态转移和长期奖励,不像传统推荐系统仅基于用户当前偏好。
- 提供解释性(Explainability):比协同过滤好。
- 可以学习最优策略(Learn optimal policies)
- 用于复杂决策场景
缺点:
- 模型复杂度高:状态数可能达到数千或上万,计算优化困难。
- 奖励函数设计困难
- 数据需求极高:即使有数千万条原始数据,能清洗出来用于建模的可能只剩几万条
- 对人的非理性行为不敏感
其他风险:
- 伦理风险:用 MDP 推荐高风险治疗(如手术、化疗)时,缺乏人类参与可能引发信任危机。
- 责任归属模糊:如果算法建议出现问题,责任落在医生、系统设计者还是机构?
- 低质量数据带来误导:特别是在 NLP 清洗医疗文本等场景,错误或歧义可能导致推荐偏差。
MDP如何用于半自动驾驶?
- 划分汽车驾驶舱的AOI
- 定义子任务与关联度,划分层级
- MDP建模:
- 状态 sss:当前注视所在AOI + 各子任务信息“已知/未知”(用二值向量表示)
- 动作:转移AOI
- 转移概率:基于各AOI的“带宽”,模拟不同视线停留后获得信息量的随机性
- 奖励:每次注视带来的“情境感知增益”,并按子任务优先级(如车道保持>前车距离>导航设定)加权。
还可以:
- 注意力监测与干预:系统实时评估司机当前注视模式与最优策略的偏差,若偏离过大(如长时间只盯屏幕),则发出语音或振动提醒,防止“监控疲劳”
- 自适应显示:当系统检测到司机对某些AOI获取信息不足时,可临时高亮HUD或语音播报关键信息(如车距、盲区来车)
- 培训与评价:通过比较新手/老手司机的注视策略与MDP最优策略,量化驾驶训练效果,并调整模拟器场景
其他场景: 其他领域如医疗、交通管制、工业监控等,也都存在“多源信息→多子任务→有限注意力”这一共性,均能通过SA-MDP模型设计“最优注视/监控策略”,提升整体情境感知与决策效率。
Week 10 Reinforcement Learning
什么是强化学习
一种ML类型,Agent通过与环境做出交互,试探动作来获得奖励/惩罚。目标是学习一种策略,以最大化累计奖励。
在需要训练代理根据复杂、不确定或动态环境做出决策的情况下特别有用。
- 自动驾驶:复杂的交通情况,天气,道路障碍
- 股市:地缘政治,经济动荡
- 医疗诊断
在RL中,agent自动从没有标签的数据中学习,agent从自己的经验中学习。 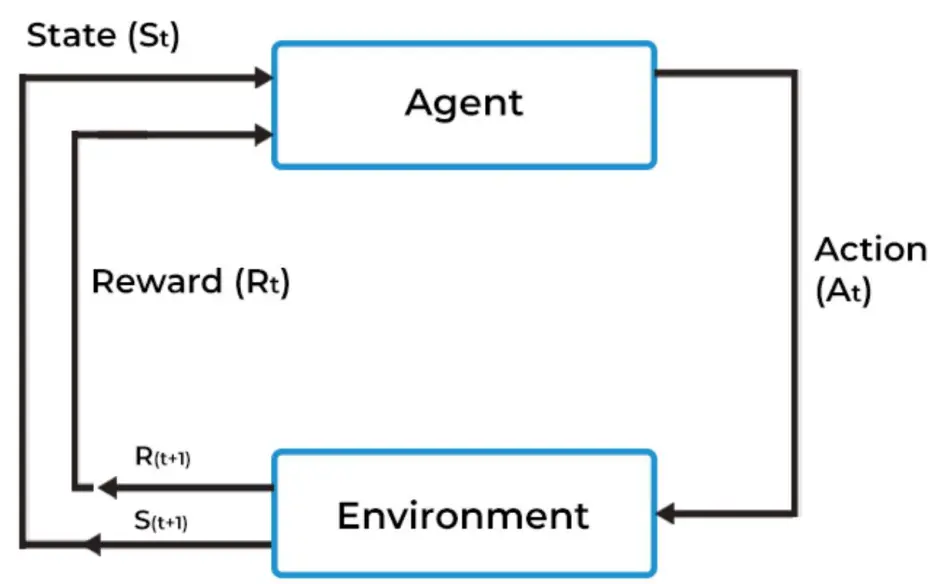 Agent是ML algorithm,或者自动系统,环境是指有属性(例如变量、边界值、规则和有效操作)的适应性问题空间。
Agent是ML algorithm,或者自动系统,环境是指有属性(例如变量、边界值、规则和有效操作)的适应性问题空间。 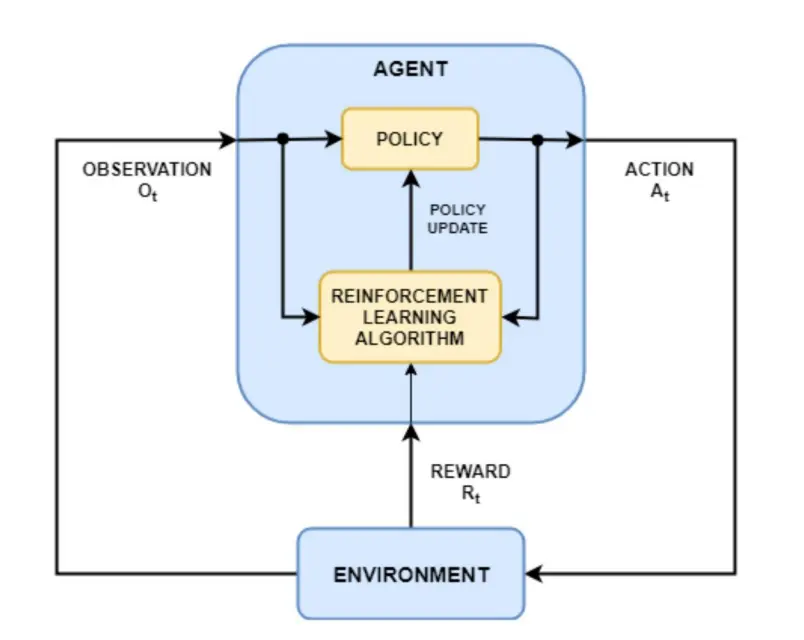 一些问题用到了RL:
一些问题用到了RL:
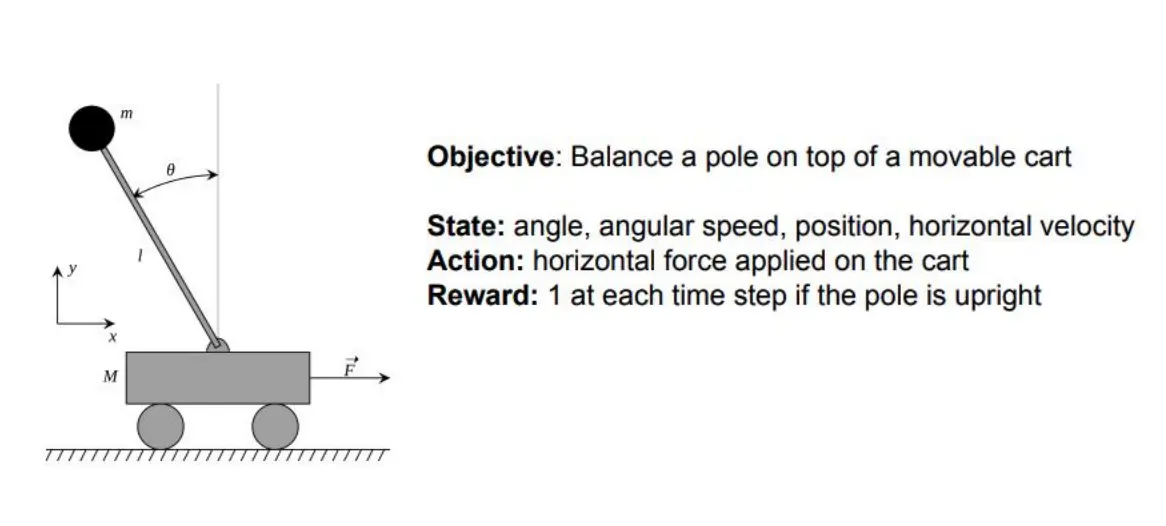
- Cart-Pole Problem
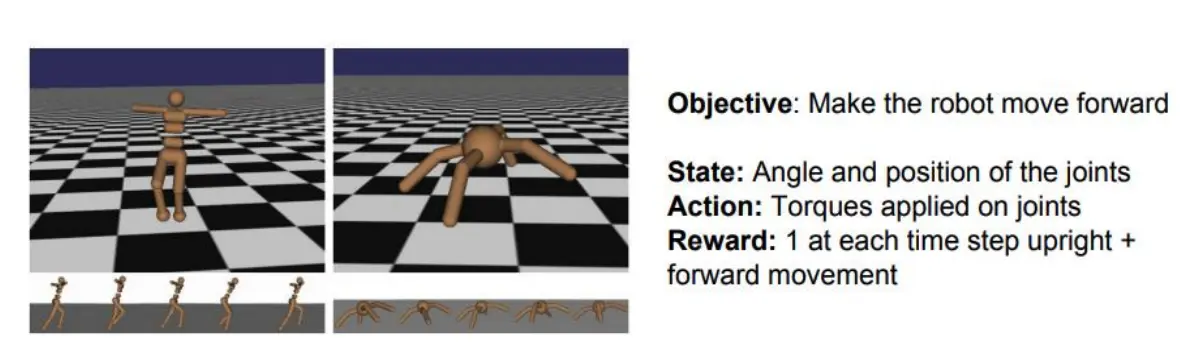
- 机器人运动
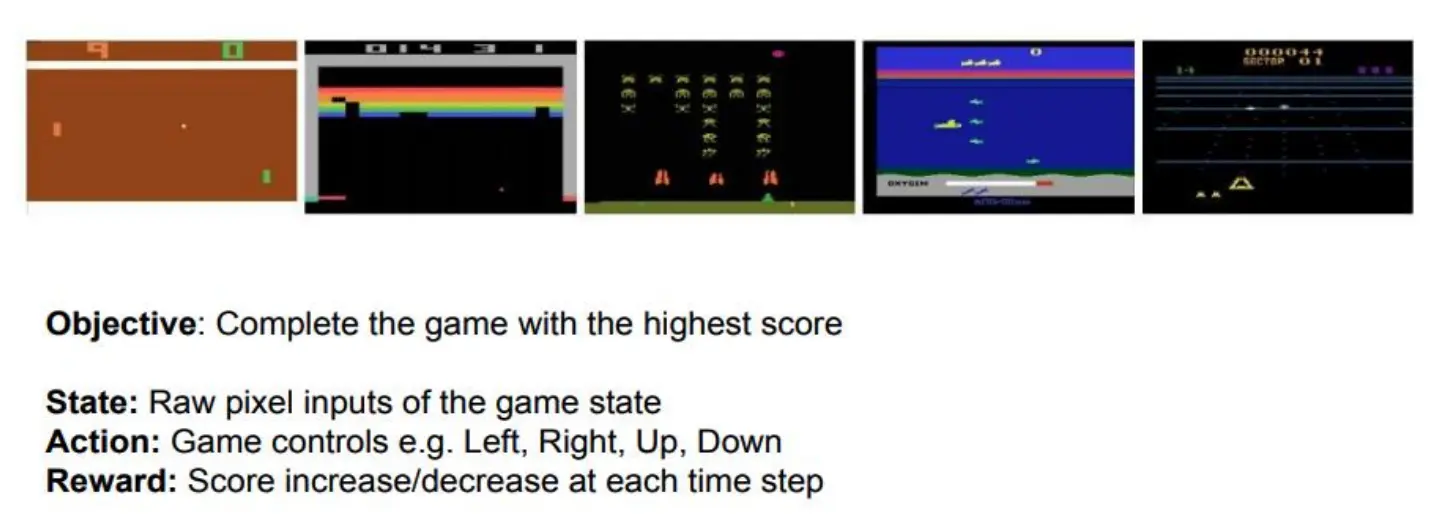
- Atari Games
MDP
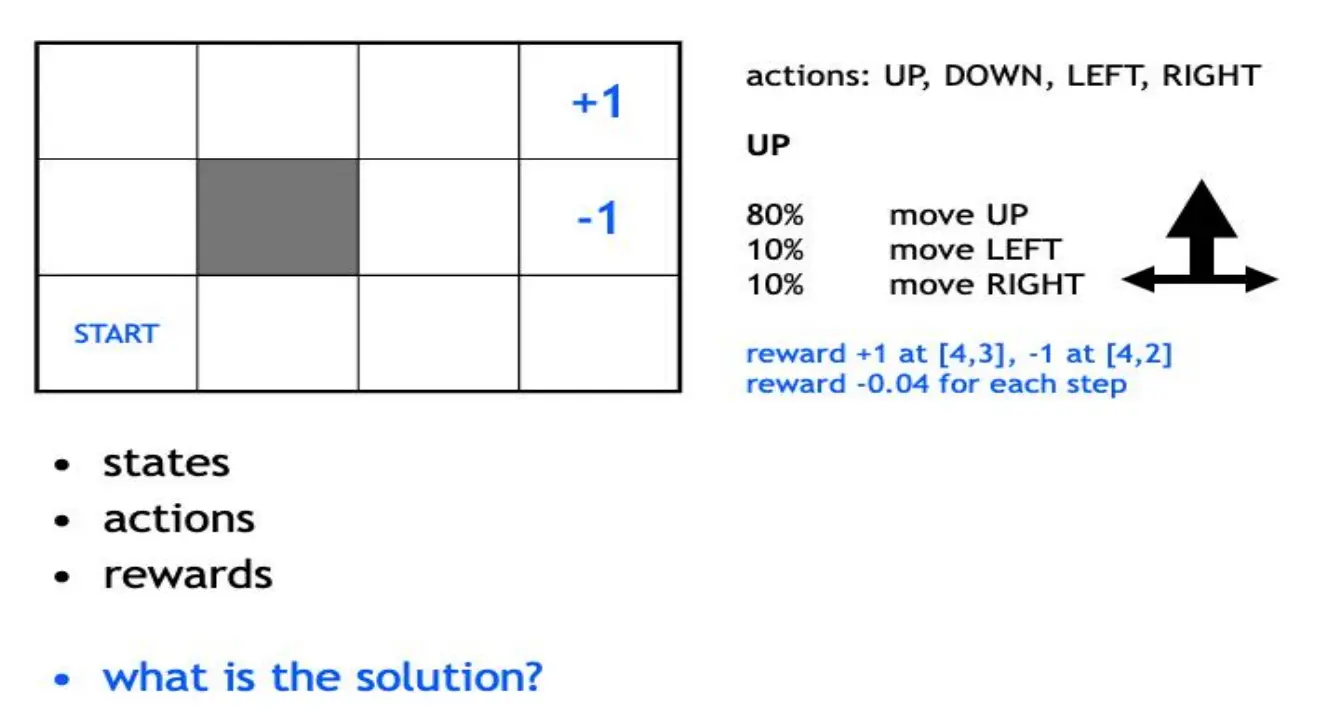 注意,每一步奖励是-0.04
注意,每一步奖励是-0.04
 这是否是最优解呢?不一定。 因为agent在80%的概率是朝着正确方向走的,还有20%的概率偏离。因此,上图策略在实际执行中可能因为偏移导致撞墙、或者错过终点,未必能最大化期望回报
这是否是最优解呢?不一定。 因为agent在80%的概率是朝着正确方向走的,还有20%的概率偏离。因此,上图策略在实际执行中可能因为偏移导致撞墙、或者错过终点,未必能最大化期望回报
本例真正的“解”是要找出最优策略𝜋∗,在随机转移和折扣回报下最大化
当每一步reward为-0.1的时候,策略为:  当为-2时,策略为:(宁愿踩上-1,也要快速到达+1)
当为-2时,策略为:(宁愿踩上-1,也要快速到达+1)  当为+0.01的时候,那就一直不到,远离最好:
当为+0.01的时候,那就一直不到,远离最好:  如何形式化建模一个RL问题?用MDP。
如何形式化建模一个RL问题?用MDP。  一个策略 π 是指指定在每个状态下要采取的操作的函数。 我们的目标是找到最优策略 π*,能够最大化累计折扣reward:
一个策略 π 是指指定在每个状态下要采取的操作的函数。 我们的目标是找到最优策略 π*,能够最大化累计折扣reward:
我们真正要解的是,如何在所有可能的策略中,选出那个能够最大化未来奖励之和的策略 π*。由于初始状态、状态转移具有随机性(transition probabilities),我们不能只看单次轨迹,而要最大化期望累积奖励。 所以形式化定义为:
即在所有策略中,选择使期望折扣累积奖励达到最大者。 我们定义Episode(回合)为:
- 从智能体处于某个初始状态(initial state)开始,按照策略不断选择动作、观察新状态并获得奖励,直到 达到某个终止条件。
折扣机制
强化学习中,我们关心的是随时间累积的回报,不同的计量方式有两种常见形式:
- Additive rewards(累加回报):
- Discounted rewards(折扣回报):
- 引入折扣因子,对未来的奖励打折扣。因子越小,越“偏好”即时奖励,因子越接近1,则更看重长期回报。
- 折扣机制能保证在无限回合下收敛,也可以刻画风险偏好和任务时长偏好。
Value Function 状态价值函数
估计从给定状态s开始,按照某个策略执行时,智能体能获得的期望累积未来奖励。
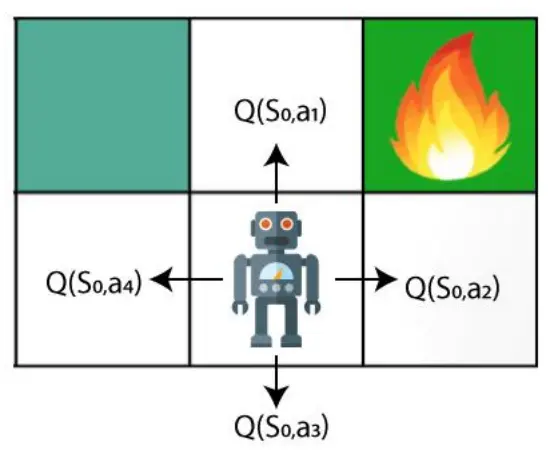
Q-Function 状态-动作价值函数
比Value Function多了一个这一步要采用的动作。用于估计在给定状态 s 下,执行某个动作 a,然后按照策略 π 继续进行时,智能体所期望获得的累积未来奖励。
明确考虑了在状态 s 下执行动作 a 的后果,因此能帮助智能体评估每个可能的动作。 状态价值函数可以看作是状态-动作价值函数 Q 对所有可能动作的期望。
Bellman Equation 贝尔曼方程
贝尔曼方程描述了如何递归地计算一个状态的价值V(s)。
例子: 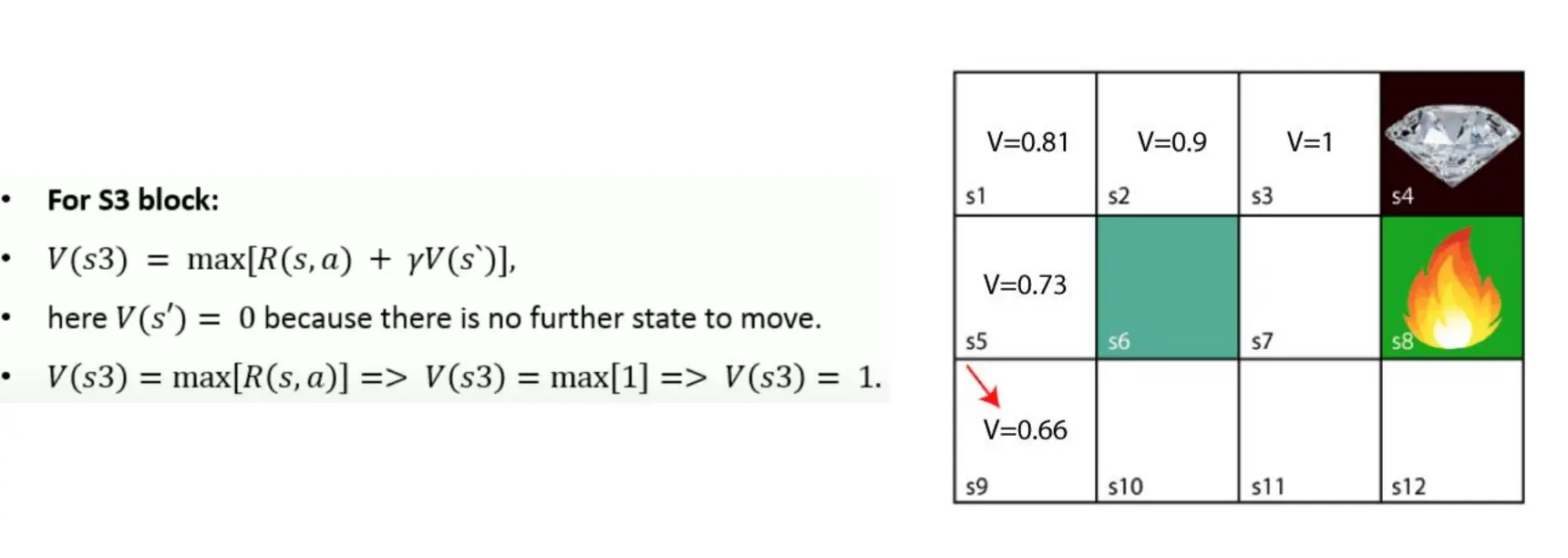
Q-Learning
 对于这个例子,代理将根据概率基础采取行动并进行更改。我们需要在Q值方面进行一些更改。
对于这个例子,代理将根据概率基础采取行动并进行更改。我们需要在Q值方面进行一些更改。
Q-learning是一种 无模型:这意味着它不需要知道环境的动态或转移概率。换句话说,Q-learning 不依赖于环境的具体转移模型(即状态如何根据动作转移,及这些转移的概率)。 基于价值:关注的是学习 状态-动作价值函数 Q(s,a), 离策略算法,更新 Q 值时,可以使用不同于当前策略的数据,通常使用的是探索策略(如 epsilon-greedy 策略)。 将根据代理的当前状态找到最佳的一系列动作。 “Q”代表质量。质量表示动作在最大化未来奖励方面的价值。
Q-table 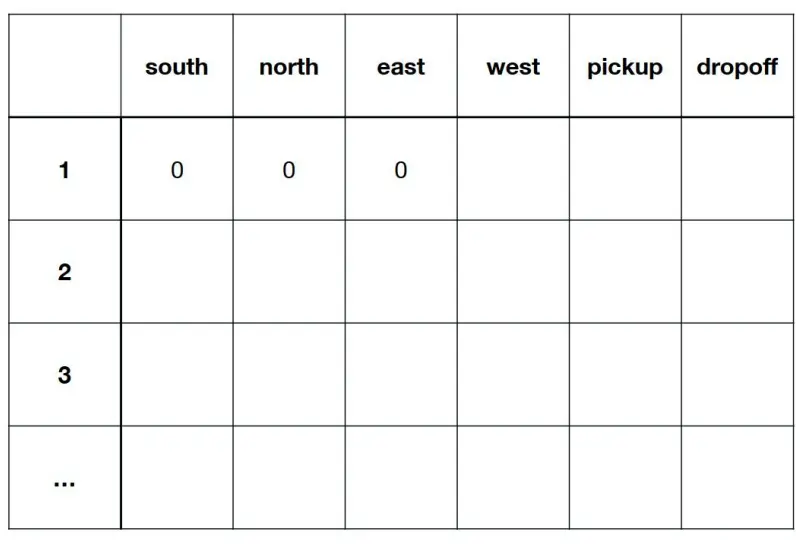 Q-learning Open: Pasted image 20250429141831.png
Q-learning Open: Pasted image 20250429141831.png
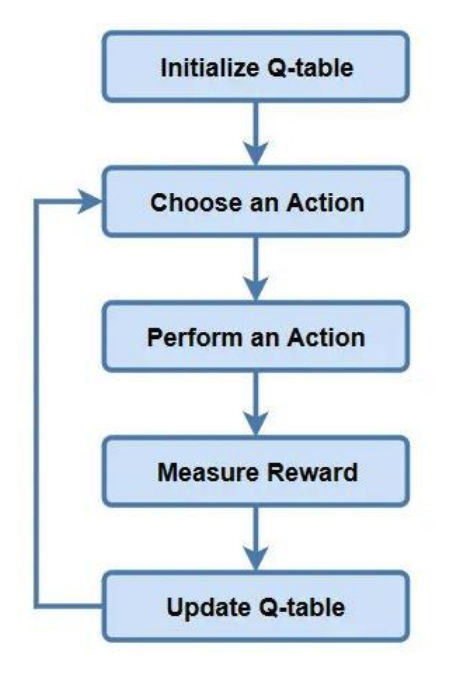
- 初始化 Q 表:对于每个状态s和动作a,初始化 Q 值Q(s,a)为0
- 观察当前状态s
- 选择一个动作:在当前状态s下,智能体选择一个动作a并执行,选择的方式通常是 探索或 利用,例如通过 epsilon-greedy 策略选择。
- 接收即时奖励r,执行动作后,智能体会从环境中得到即时奖励r,这个奖励可以是正值或负值,表示该动作在当前状态下的效果。
- 观察新的状态s',
- 更新 Q 值:通过贝尔曼方程来更新 Q 表
- 更新状态s <- s'
例子: 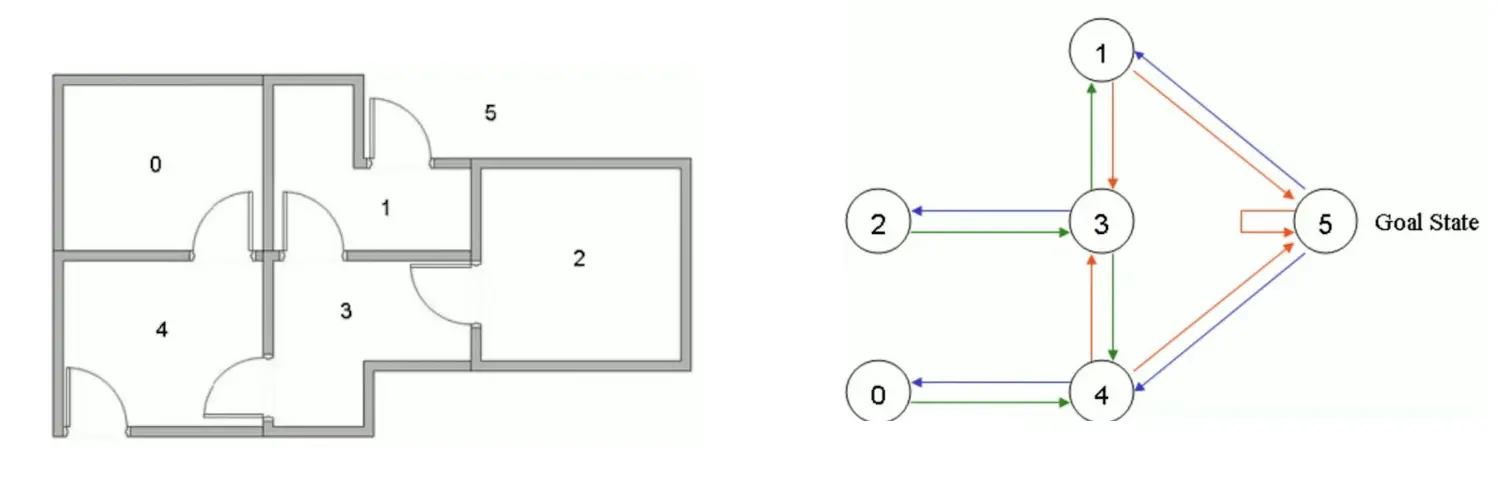 我们定义一下Reward:
我们定义一下Reward:
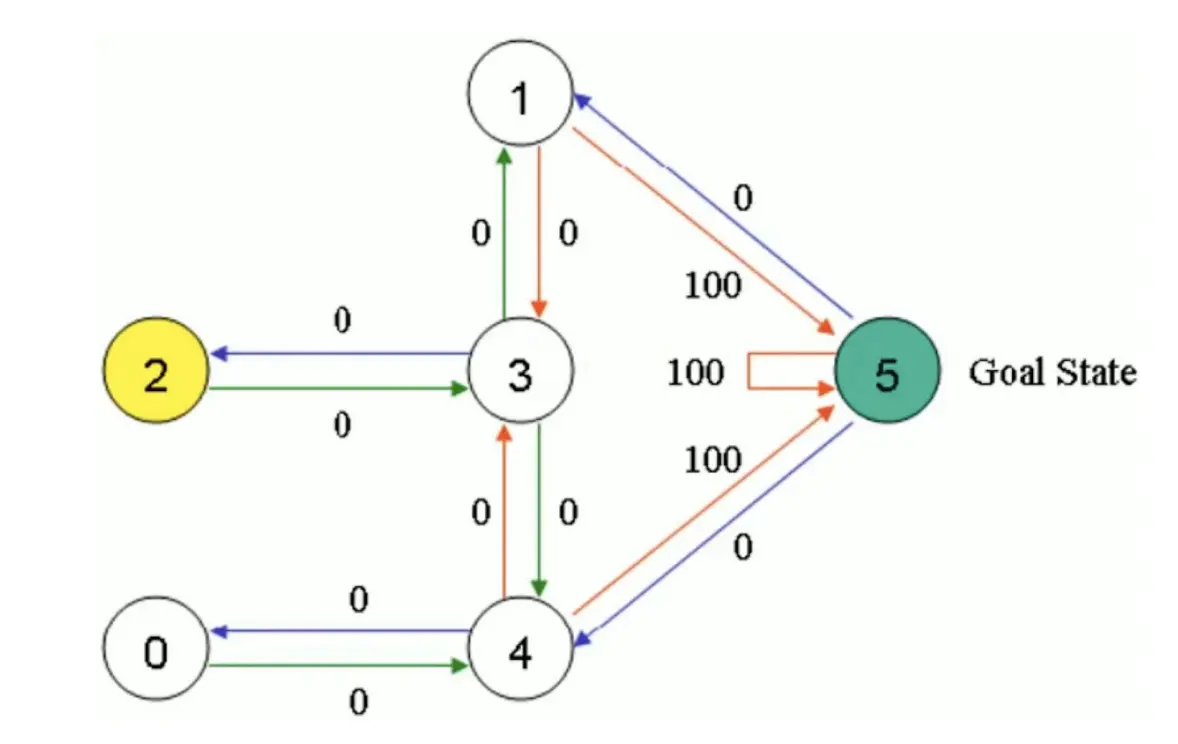 首先,初始化Action表和Q表:
首先,初始化Action表和Q表: 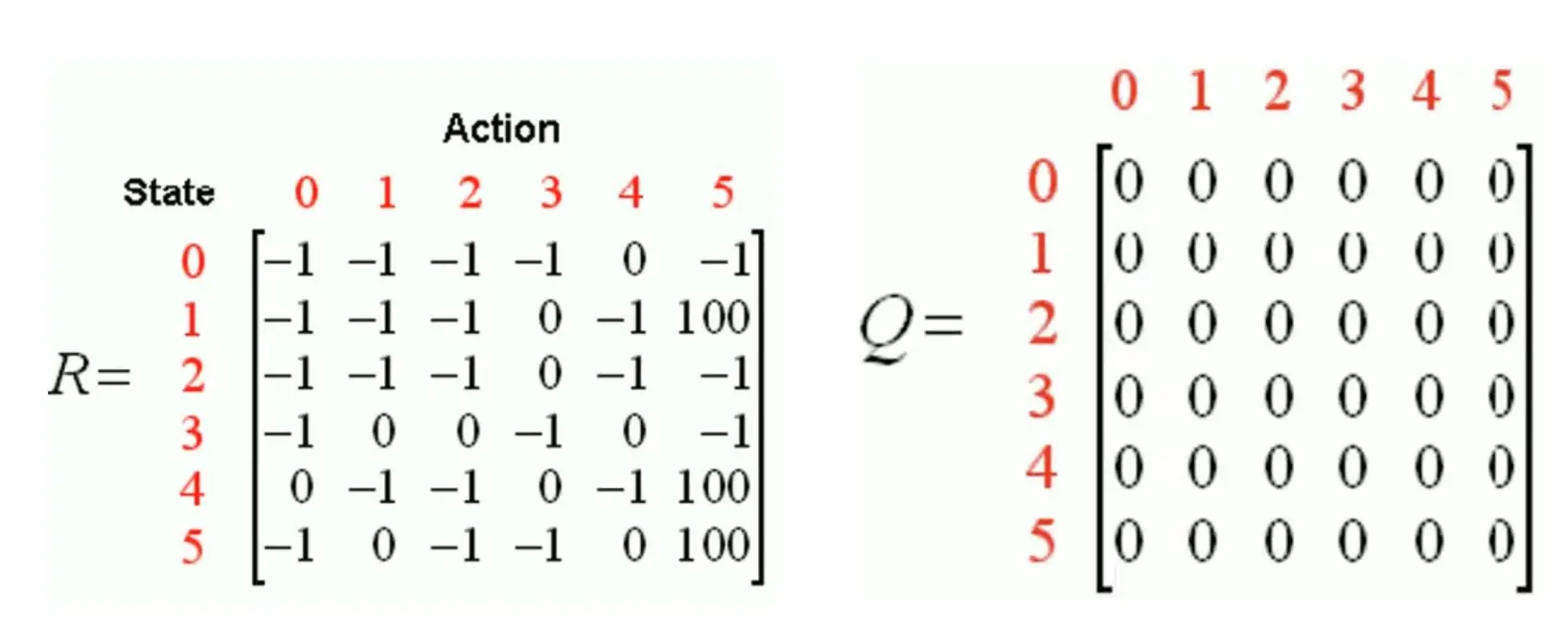 我们把状态1当做起始状态。要么去3,要么去5,显然去5,所以选择去5。那么我们想要更新Q表。5能到1,5,4 Q(1,5) = Reward(1,5) + 0.8max[Q(5,1), Q(5,5), Q(5,4)] = 100 + 0.8 *0 = 100 所以更新:
我们把状态1当做起始状态。要么去3,要么去5,显然去5,所以选择去5。那么我们想要更新Q表。5能到1,5,4 Q(1,5) = Reward(1,5) + 0.8max[Q(5,1), Q(5,5), Q(5,4)] = 100 + 0.8 *0 = 100 所以更新: 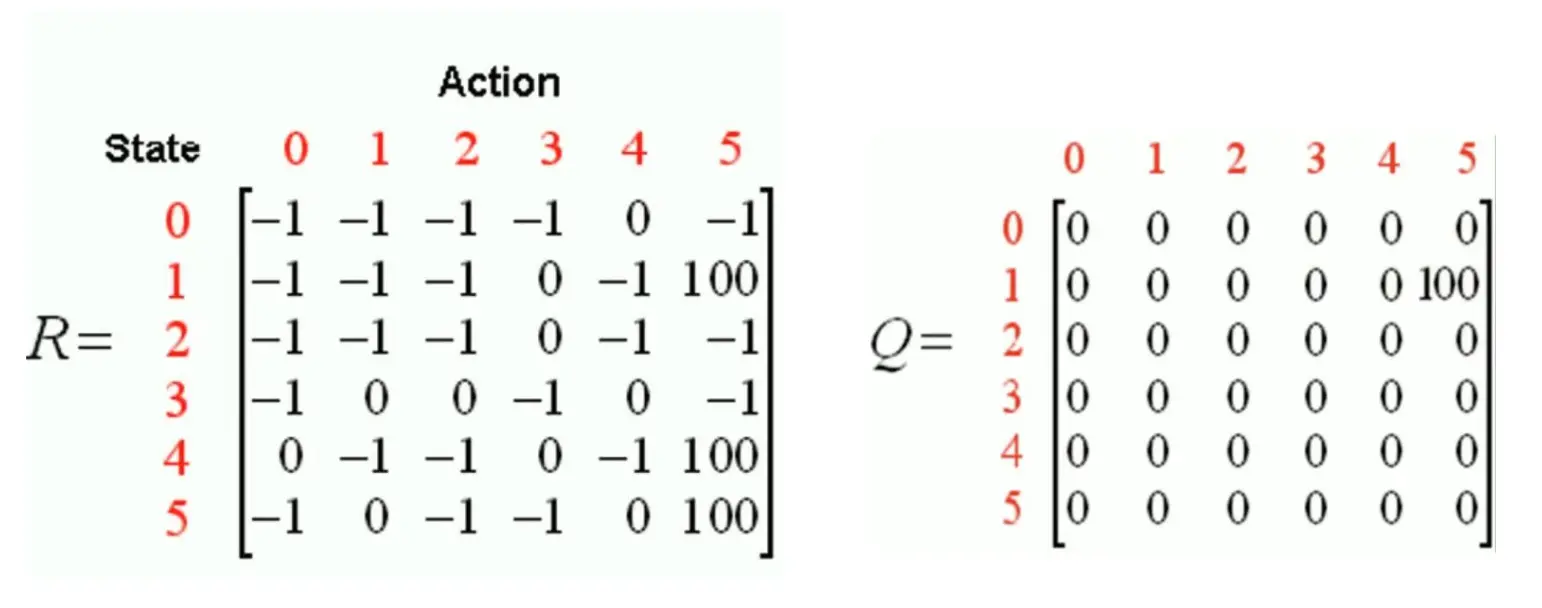 然后我们还是随机取一个起点,比如说3,能去1,2,4。比如说要去1. 那么Q(3,1) = R(3,1) + 0.8max[Q(1,3), Q(1,5)] = 0 + 0.8 * 100 = 80 更新Q表:
然后我们还是随机取一个起点,比如说3,能去1,2,4。比如说要去1. 那么Q(3,1) = R(3,1) + 0.8max[Q(1,3), Q(1,5)] = 0 + 0.8 * 100 = 80 更新Q表: 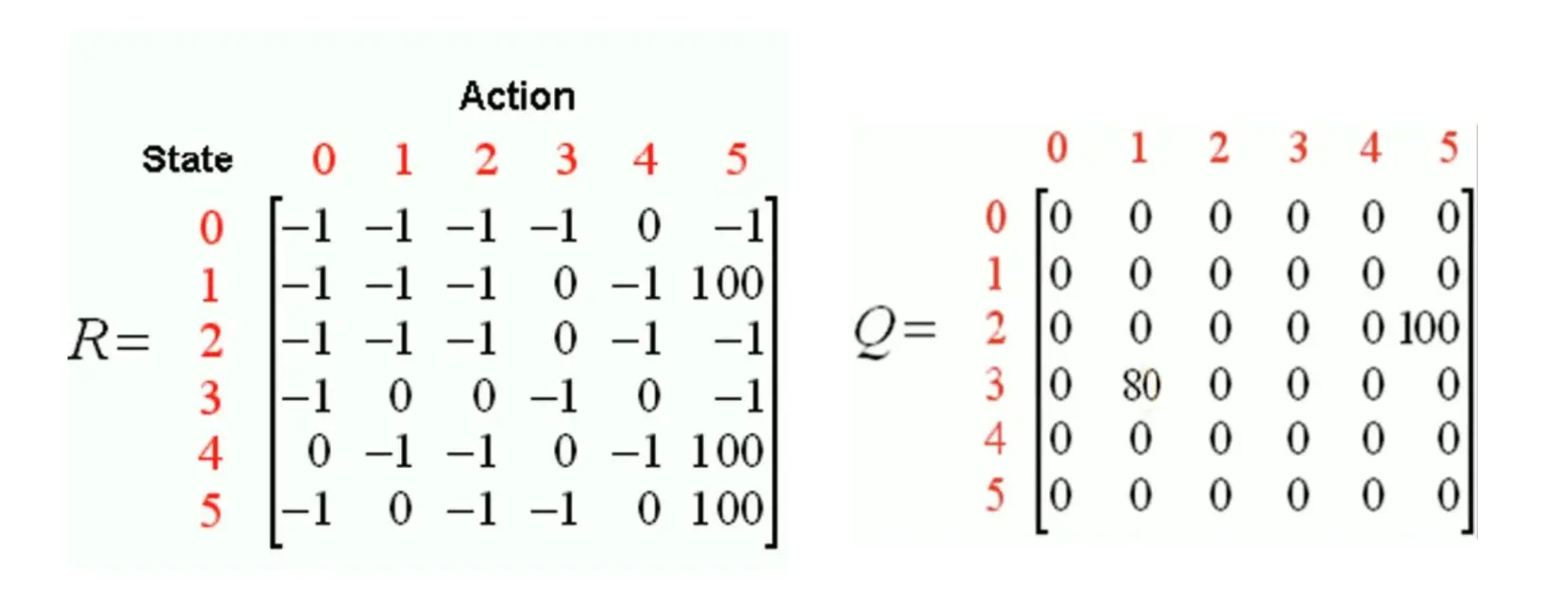 最后不断迭代,得到:
最后不断迭代,得到: 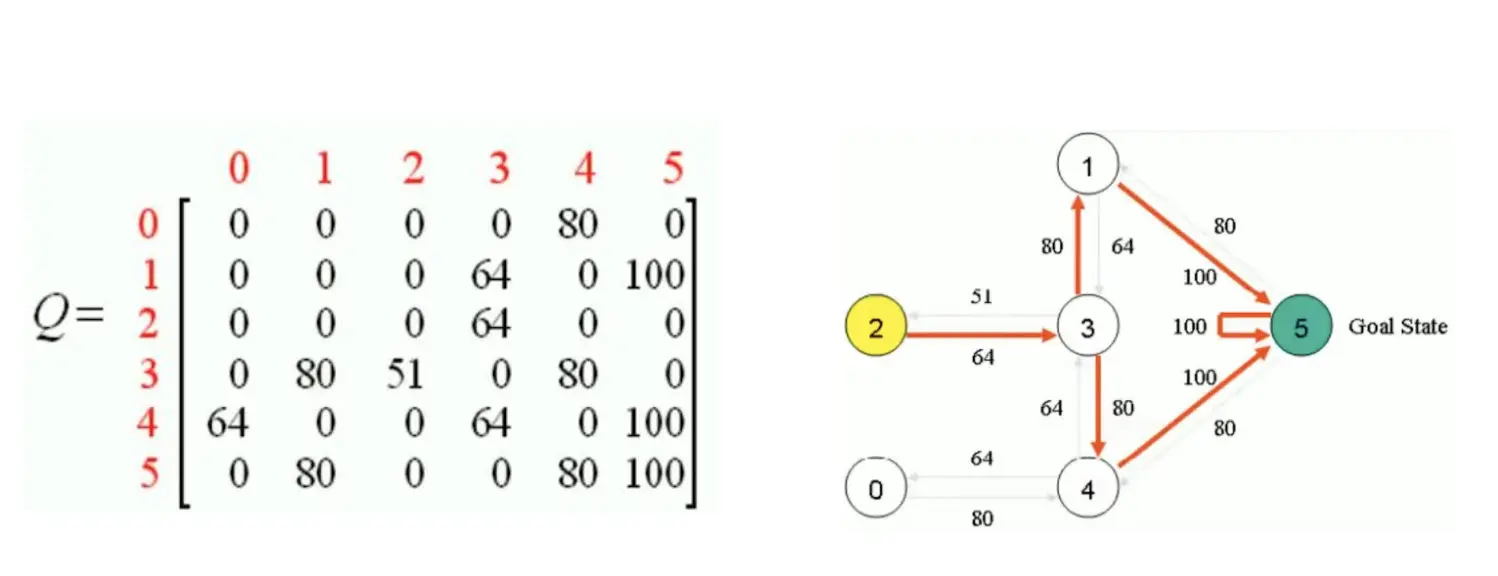
每次更新完 Q 表后,智能体的起点和动作选择可以是随机的。但是否完全随机依赖于所使用的探索策略。Q-learning 是一种 离策略(off-policy) 学习算法,因此它允许使用不同的策略来生成数据,并且不需要当前的策略来做出动作选择。
 Larry Shi
Larry Shi{kind=link}