Transformer
Transformer是利用了Attention机制 的一种架构,在当下应用广泛,改天灭地。
Scaling Law
这部分引用了 【LLM 10 大观念-1】缩放定律Scaling Law 定义:我们可以用模型大小、数据集大小、总计算量,来预测模型最终能力。(通常以相对简单的函数形态,例如:线性关系) 对于研究员而言,早就具备一些关于 Scaling 的直觉。像是:Model 越大、Data 越多,performance 都会随之提升 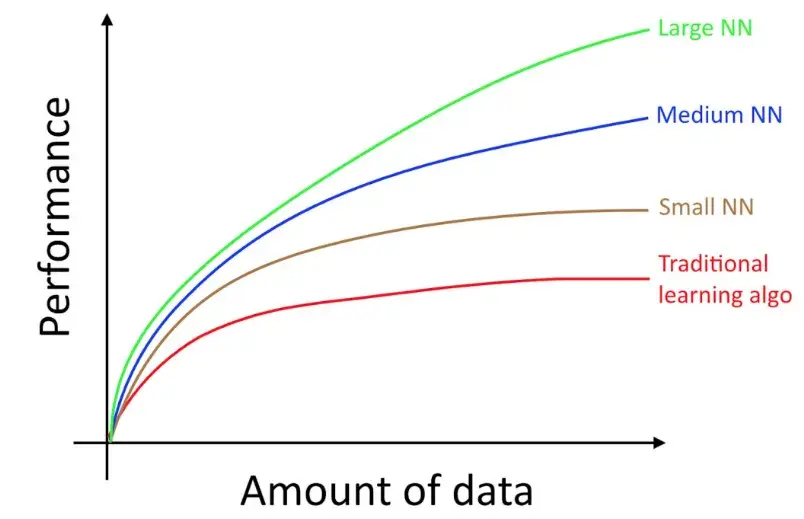 而 DeepMind 的 Chinchilla 提出的 Chinchilla Scaling Law 用数学建模了Scaling Law 当我们有了Scaling Law的直觉后,我们就会很容易想到两个问题:
而 DeepMind 的 Chinchilla 提出的 Chinchilla Scaling Law 用数学建模了Scaling Law 当我们有了Scaling Law的直觉后,我们就会很容易想到两个问题:
- Return(收益):在固定的训练计算量之下,我们所能得到的最好性能是多好?
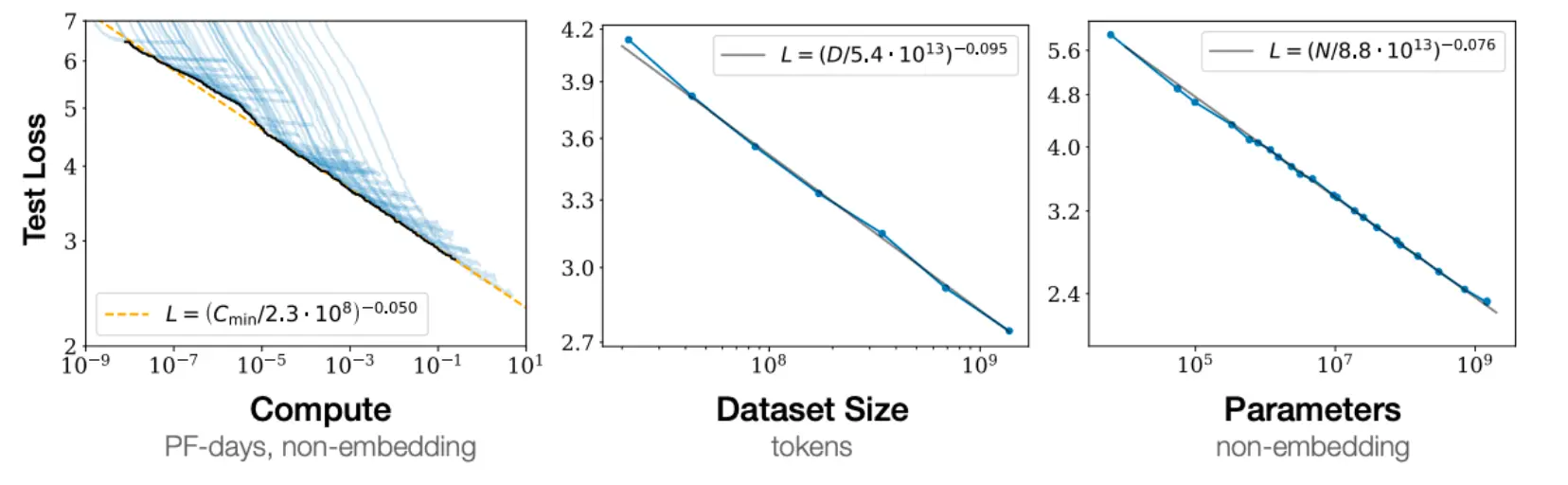
- Allocation(分配):我们要怎么分配我们的模型参数量跟 Dataset 大小。(假设计算量 = 参数量 * Dataset size,我们要大模型 * 少量 data、中模型 * 中量 data、还是小模型 * 大量 data) 那么这时,我们就需要一个比较准确的数学建模来帮我们理解问题。那么得到的结论如图:
其中N 是模型参数量、D 是数据量,L是Perplexity。 那么给了我们什么启示呢?
- 数据量(Tokens 数)应该要约等于模型参数量的 20 倍
- 数据量跟模型参数量要同比放大(例如:模型放大一倍,数据也要跟着增加一倍) OpenAI的文章指出,参数量,数据集大小,训练时间都和Loss有一种幂律关系(即,
) 
RNN to Transformer
RNN在NLP成功的de facto是采用 bi-LSTM去将句子encode。当然,你可以选择使用attention机制在解码的时候选择想要的h。 Transformer的作者在设计的时候,有三个愿望:
最小化(或至少不增加)每层的计算复杂度
当序列长度(n)<< 表示维度(d)时,每层的复杂度对于Transformer而言比我们迄今所学的循环模型要低。 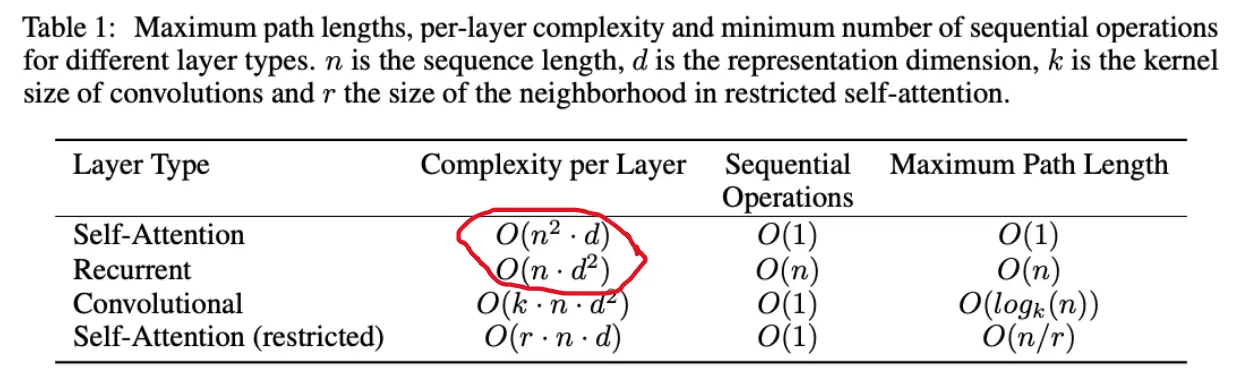
最小化任意一对单词之间的路径长度,以便促进长距离依赖关系的学习
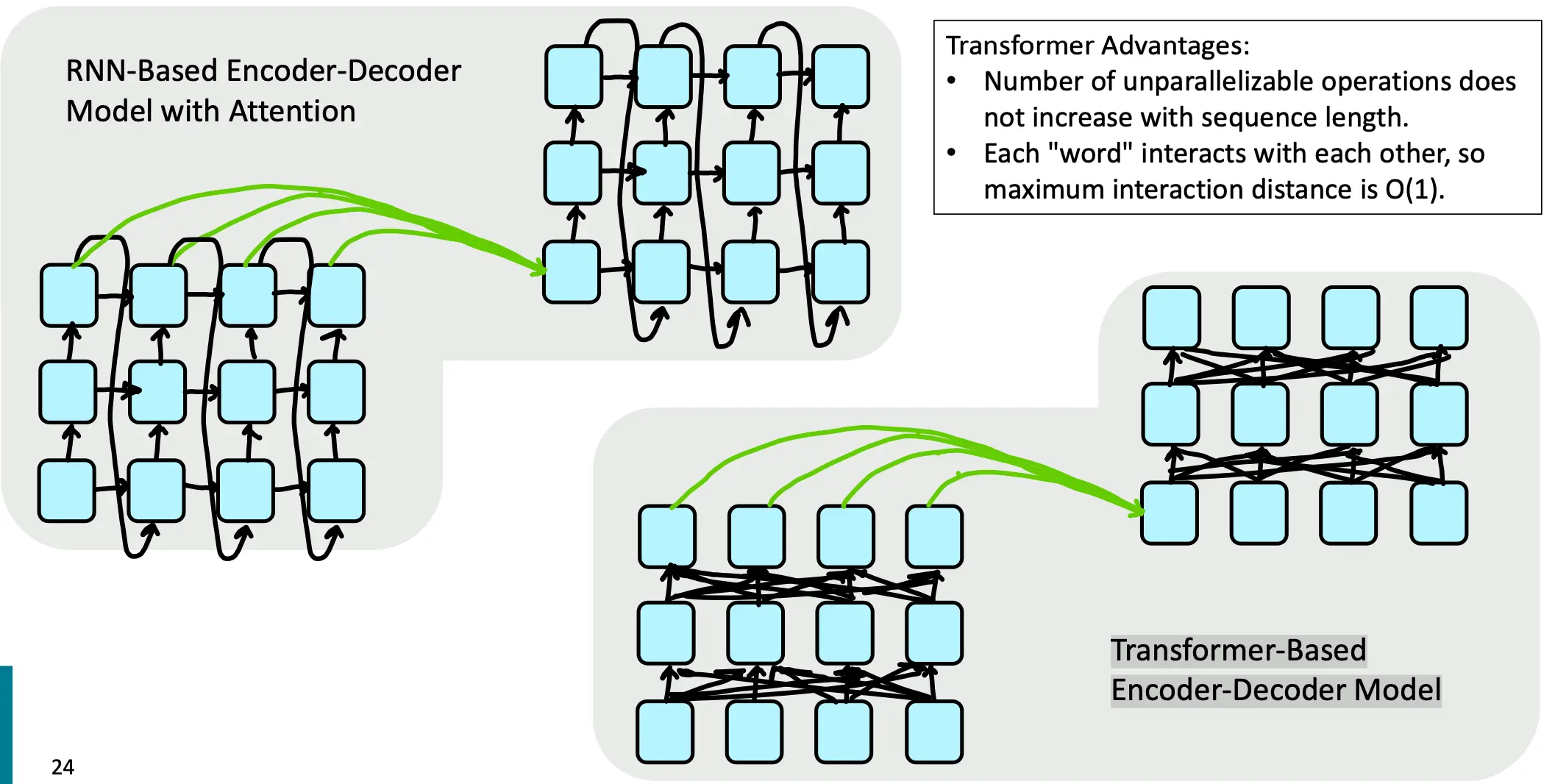
RNN从左到右展开,就地编码每个单词,这的确是一种很棒的heuristic方法,离得近的单词互相影响意思。但问题是,RNN要花O(sequence length) 步去让离的远的词交互。 这就意味着,学习长距离依赖关系很困难(因为梯度问题!) 传统序列模型假设单词的顺序是线性的(从左到右或从右到左),这对捕捉非线性依赖关系(如语法树中的依赖)非常不利。 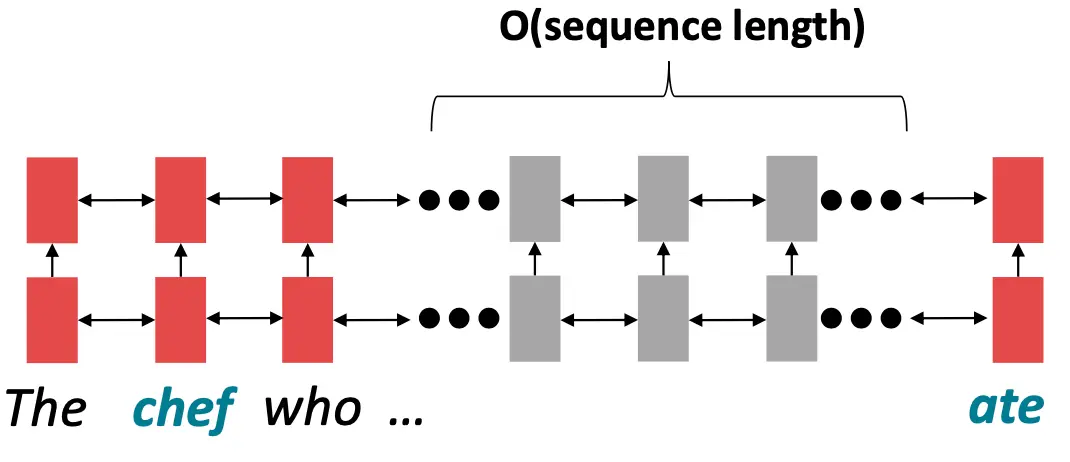
最大化可以并行化的计算量
RNN中,序列数据的处理具有时间步依赖性,这就导致了:
- 只有当 ht−1 计算完成后,才能开始计算 ht,这就导致了不能并行,序列越长,计算所需时间越多。
- 对大规模数据集的训练不友好,序列长度增加,RNN 的顺序计算会显著拖慢训练速度。内存限制也会阻碍长序列的批量训练(batch training)。
Transformer 导言
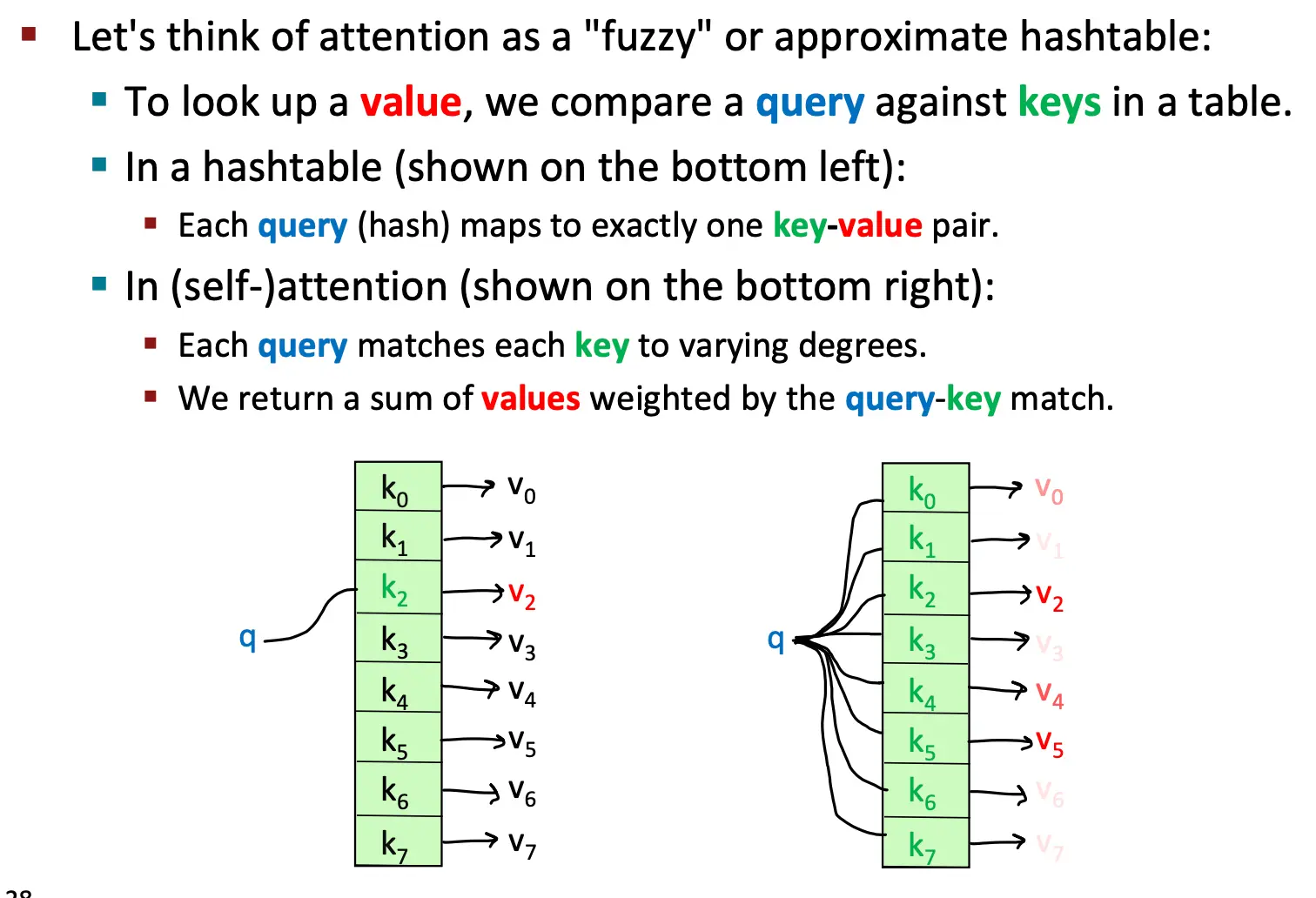
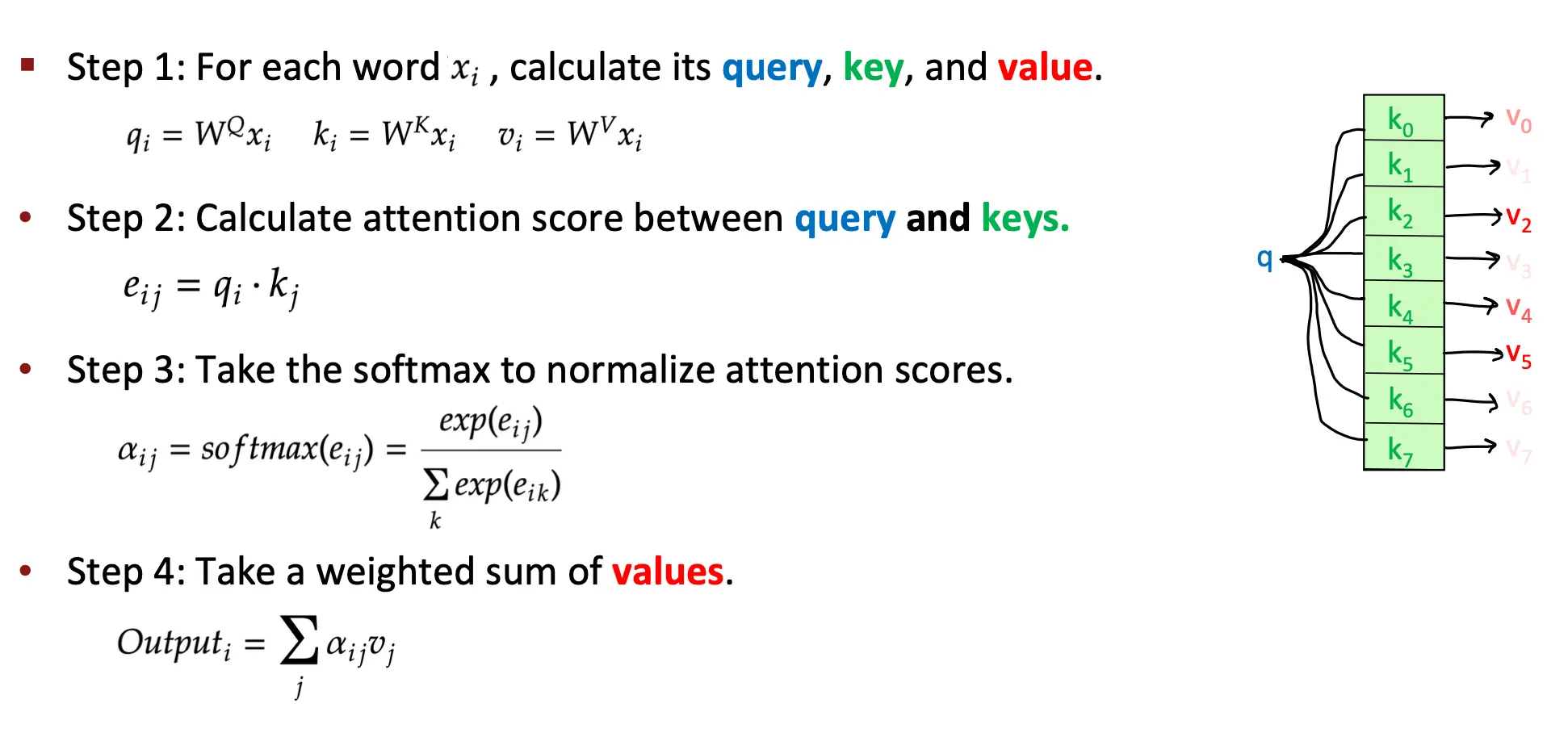
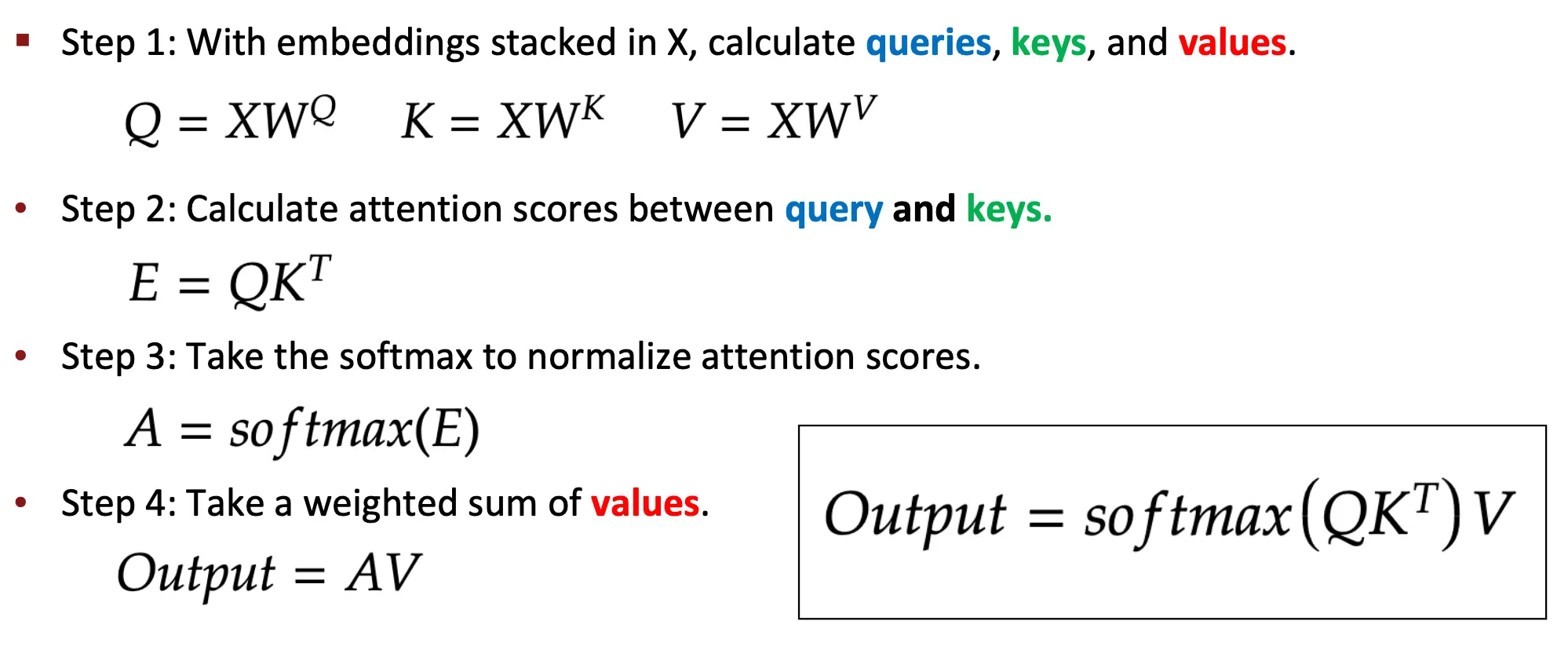
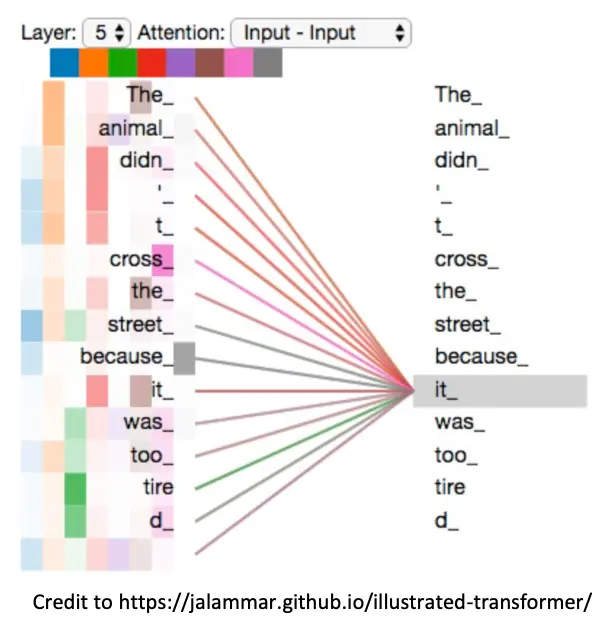
Transformer的核心机制是self-attention Attention认为要被查找的原词的向量表示为query,并从一堆values中找到相对应的信息。上次的seq2seq最后讲的attention 6 - Attention 是属于decoder to encoder结构。而self-attention是属于encoder to encoder结构 (或者decoder - decoder结构), 是each word attends to each other word within the input(or output) 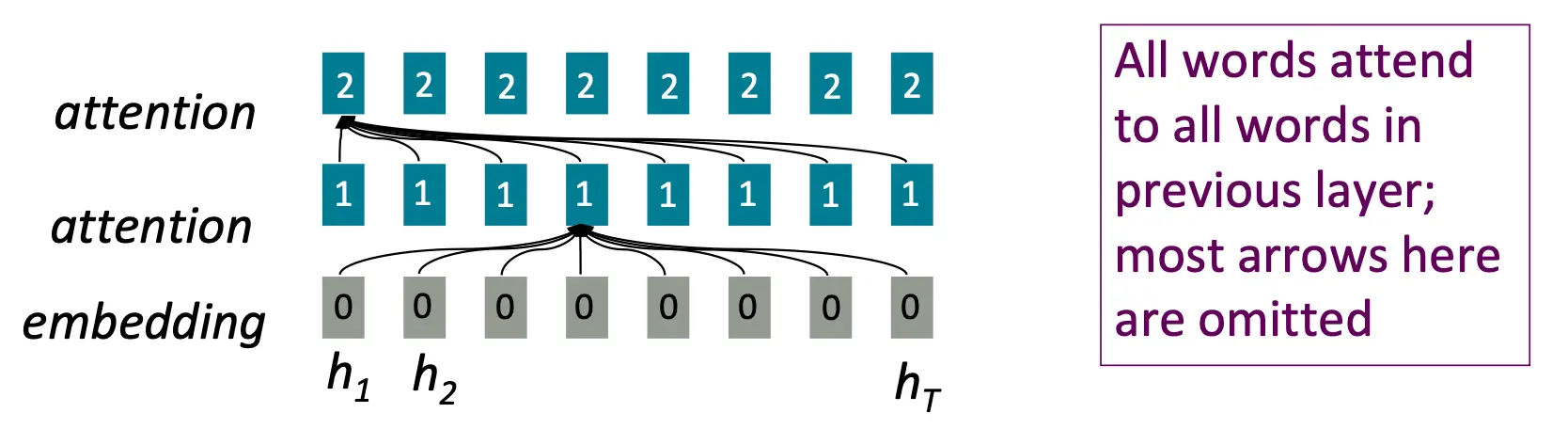 这图中表示了一个多层的 self attention 结构,每一层都包含一个自注意力模块,每个单词的表示通过自注意力机制与其他单词交互,生成新的表示。
这图中表示了一个多层的 self attention 结构,每一层都包含一个自注意力模块,每个单词的表示通过自注意力机制与其他单词交互,生成新的表示。
如果现在要用到encoder-decoder中,transformer based就和rnn based attention就有区别了:
Transformer Encoder
Self-Attention
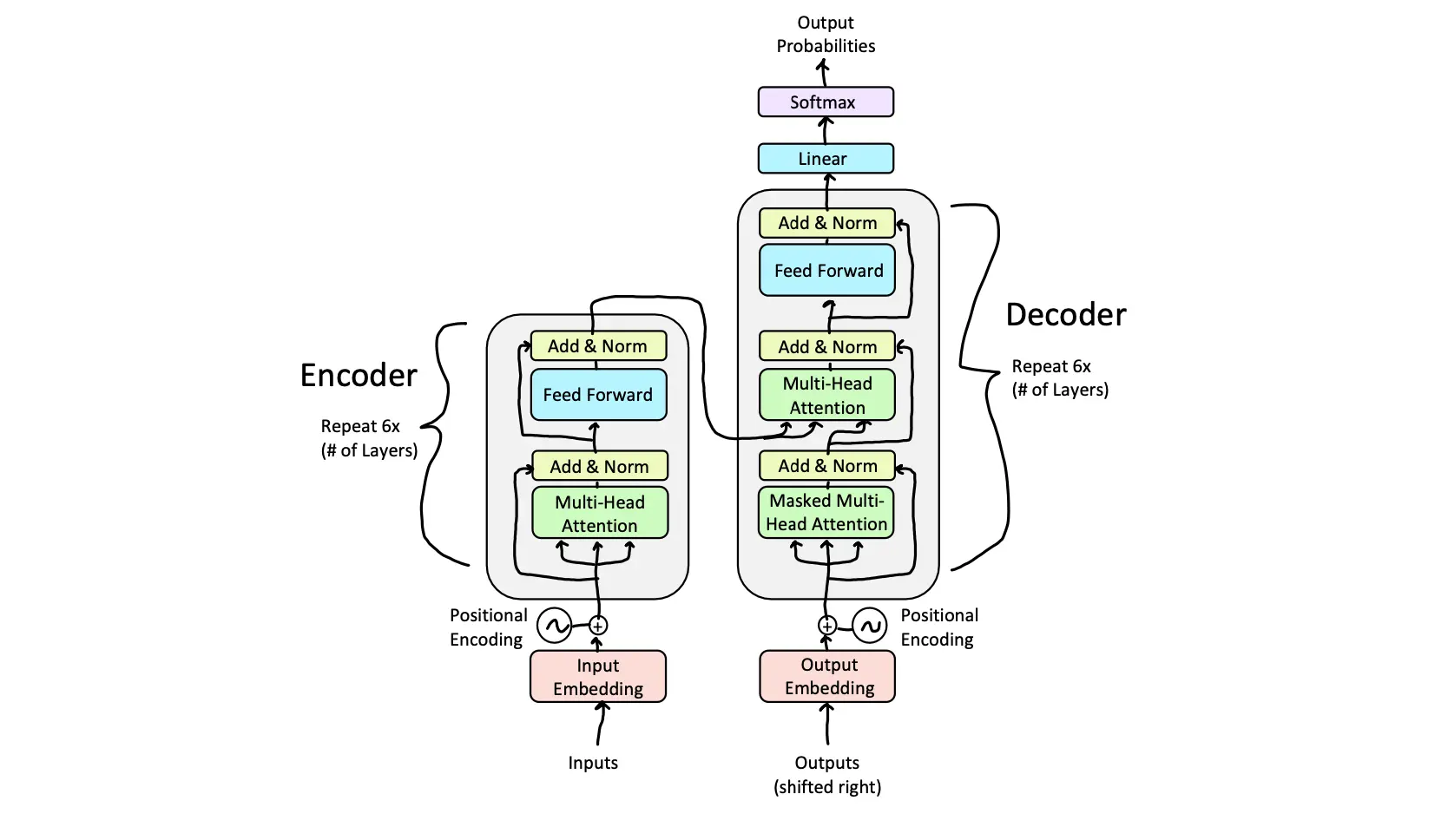
 但Attention is not all you need。因为Self-Attention 的局限性。Self-Attention 机制本质上是对输入序列中每个位置的值向量(value vectors)进行加权平均。它本身是线性的,没有非线性变换。这意味着 Self-Attention 只能在一定程度上捕捉输入序列的关系,但缺乏足够的表达能力来处理复杂的模式或非线性特征。我们可以通过在 Self-Attention 的输出之后,添加一个前馈层(FF),通过非线性激活函数(如 ReLU)引入非线性变换,从而增强模型的表达能力。
但Attention is not all you need。因为Self-Attention 的局限性。Self-Attention 机制本质上是对输入序列中每个位置的值向量(value vectors)进行加权平均。它本身是线性的,没有非线性变换。这意味着 Self-Attention 只能在一定程度上捕捉输入序列的关系,但缺乏足够的表达能力来处理复杂的模式或非线性特征。我们可以通过在 Self-Attention 的输出之后,添加一个前馈层(FF),通过非线性激活函数(如 ReLU)引入非线性变换,从而增强模型的表达能力。 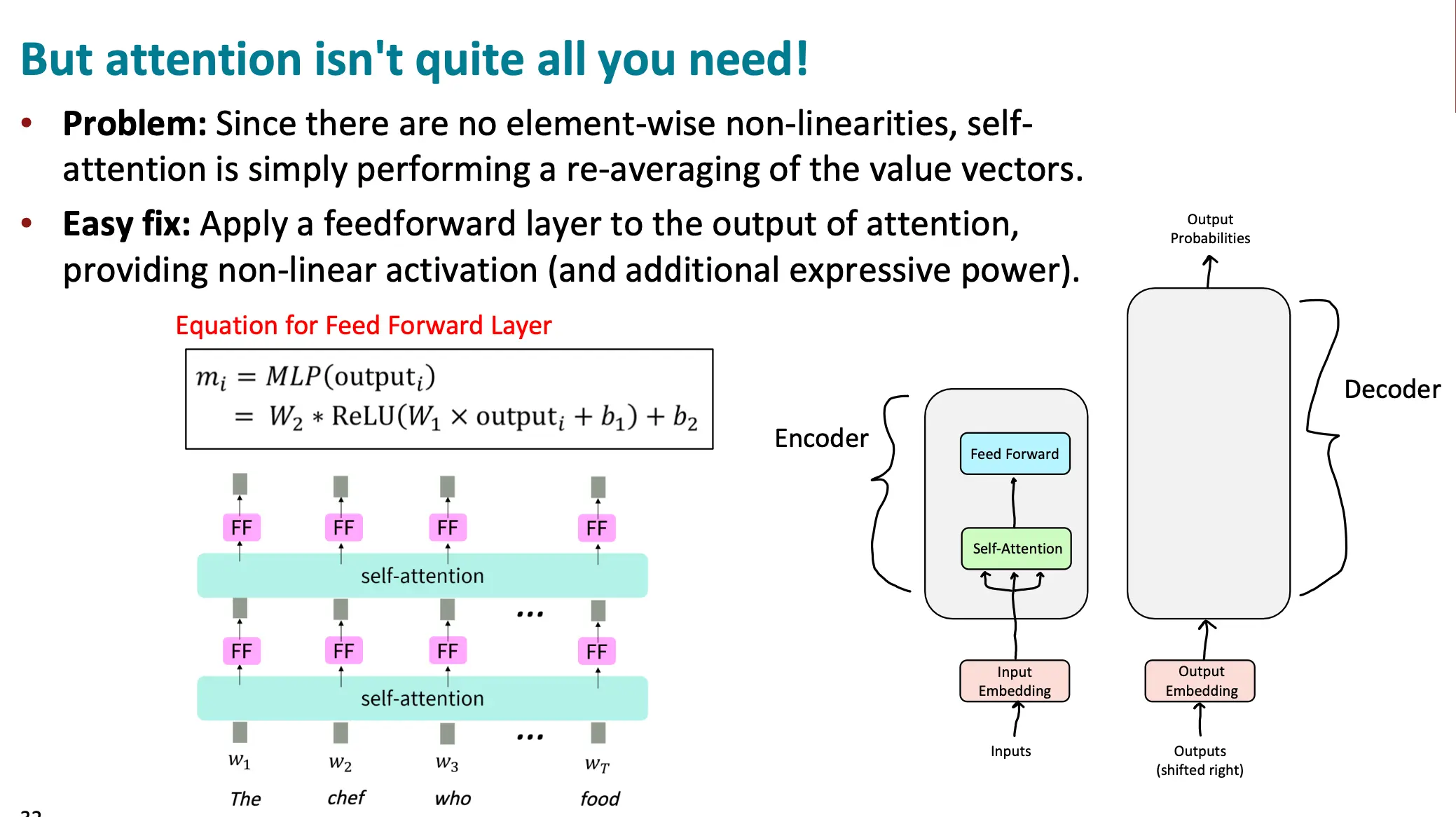
怎么训练深层的这种transformer呢?
1. 残差链接
2. LayerNorm
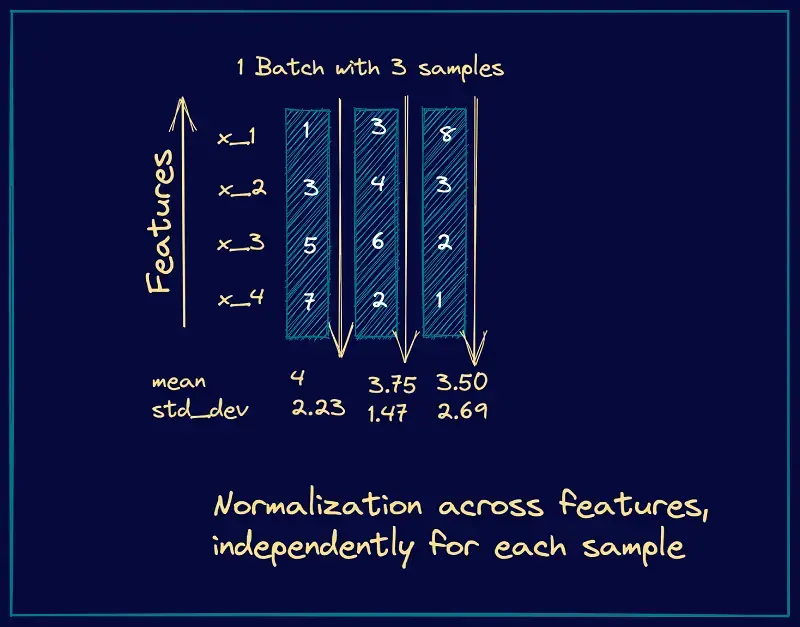
在前一层后一层中间加层归一化,就把前一层的输出求均值方差归一化之后再给第二层。 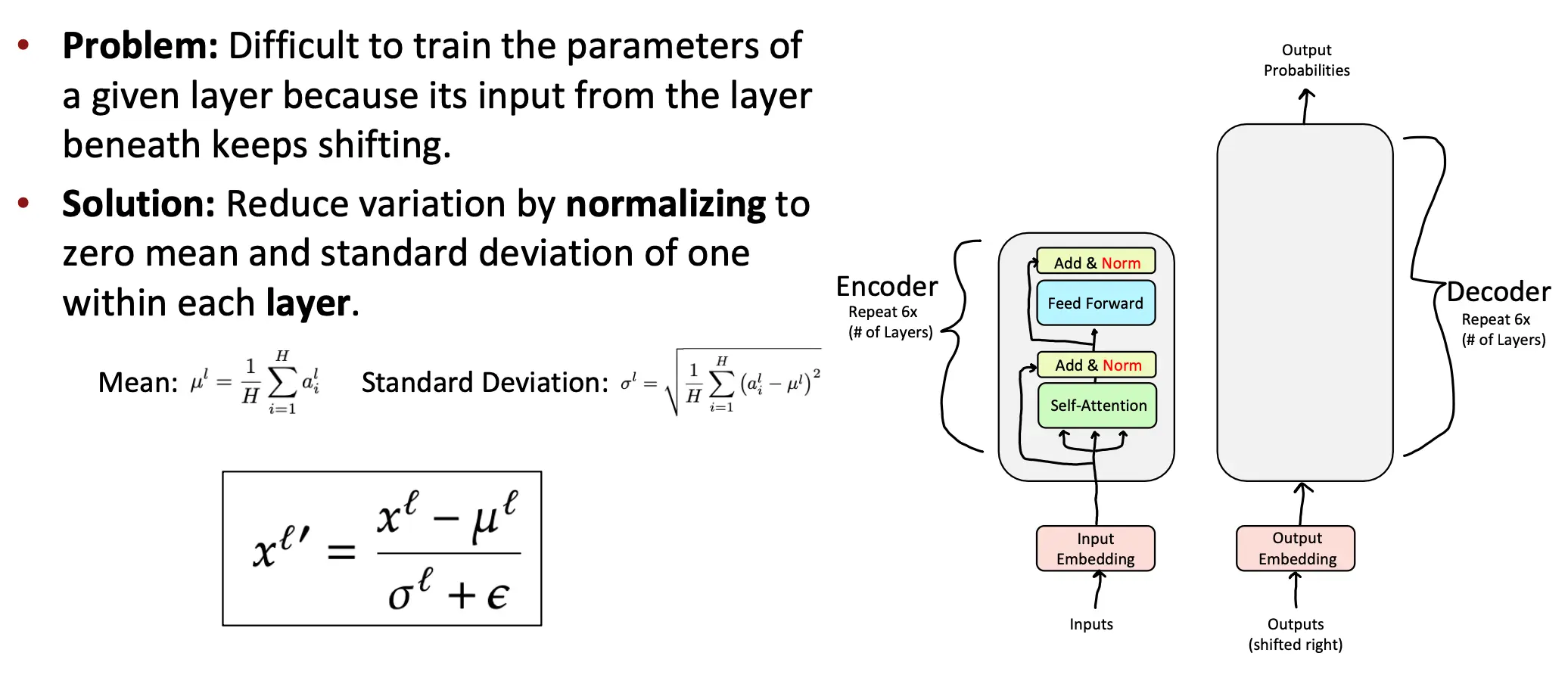 Minibatch Norm & LayerNorm
Minibatch Norm & LayerNorm 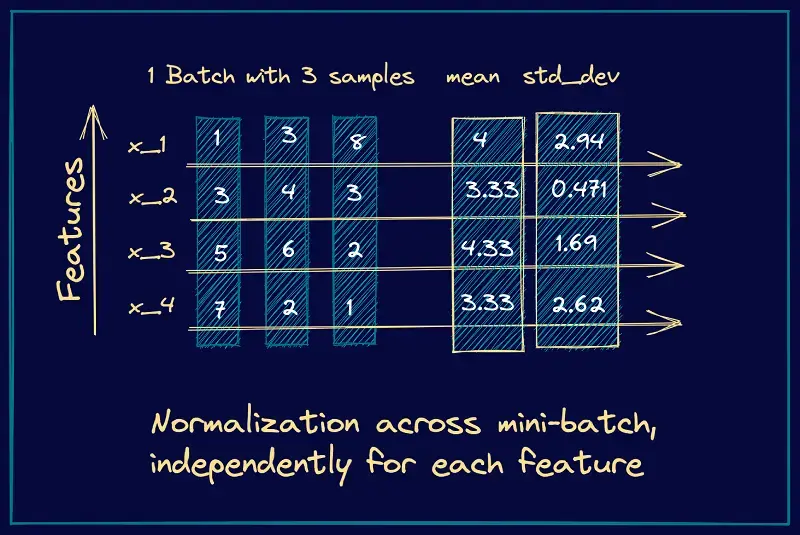
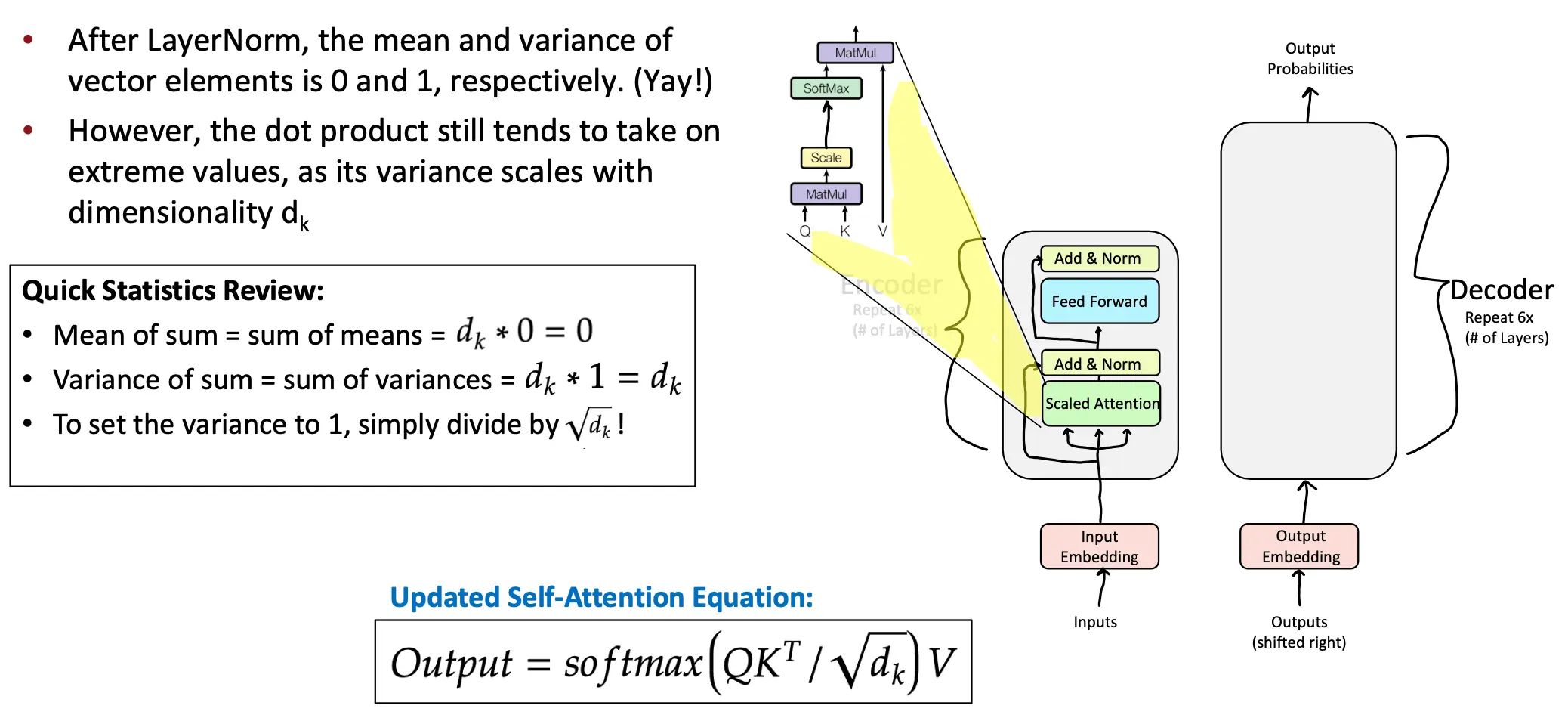
3. Scaled Dot Product Attention
点积操作的结果会随着Q K向量维度 (dk) 的增加而变得很大,从而导致数值不稳定性。这是因为:
- 点积是多个值的累积和,维度越高,累积的值越多,结果的方差会随着 dk 增大而增大。如果点积结果的方差是 dk,为了将方差缩放到 1,需要将点积结果除以 sqrt(dk)。这是因为缩放一个随机变量的标准差会影响其方差。 为什么点乘结果的方差是dk呢?因为在QK点乘之前,已经进行过层归一化了,这就会让Q中q1...qn的方差,以及K的方差都是1. 那么q1 * k1 的方差也是1,而方差是累加的,所以维度是dk,那么方差也就是1 * dk = dk。
在除以根号dk后,方差就又回到1了,好结果。 - 点积结果的方差过大,输入 softmax 的值会变得极端(过大或过小),导致梯度消失或梯度爆炸问题。 所以,引入 缩放因子
位置编码
最后还有一个问题,就是要赋予位置。思考这句话Man eats small dinosaur,顺序很有必要。所以要进行位置编码。 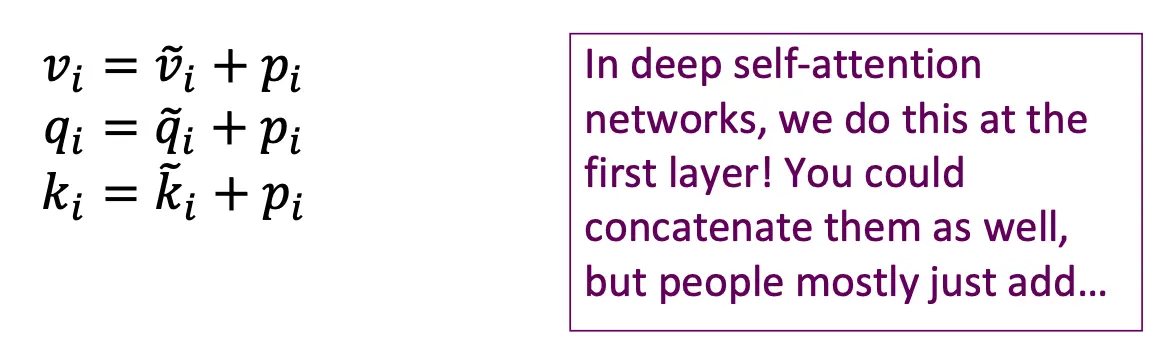 为每个位置 i 生成一个多维向量 pi。i 是序列中的位置索引(例如,第 ii 个单词)。d 是编码向量的维度(与 Transformer 的嵌入维度一致)。j 是维度索引(从 00 到 d/2−1d/2−1)。100002j/d 控制不同维度的正弦和余弦函数的周期。
为每个位置 i 生成一个多维向量 pi。i 是序列中的位置索引(例如,第 ii 个单词)。d 是编码向量的维度(与 Transformer 的嵌入维度一致)。j 是维度索引(从 00 到 d/2−1d/2−1)。100002j/d 控制不同维度的正弦和余弦函数的周期。 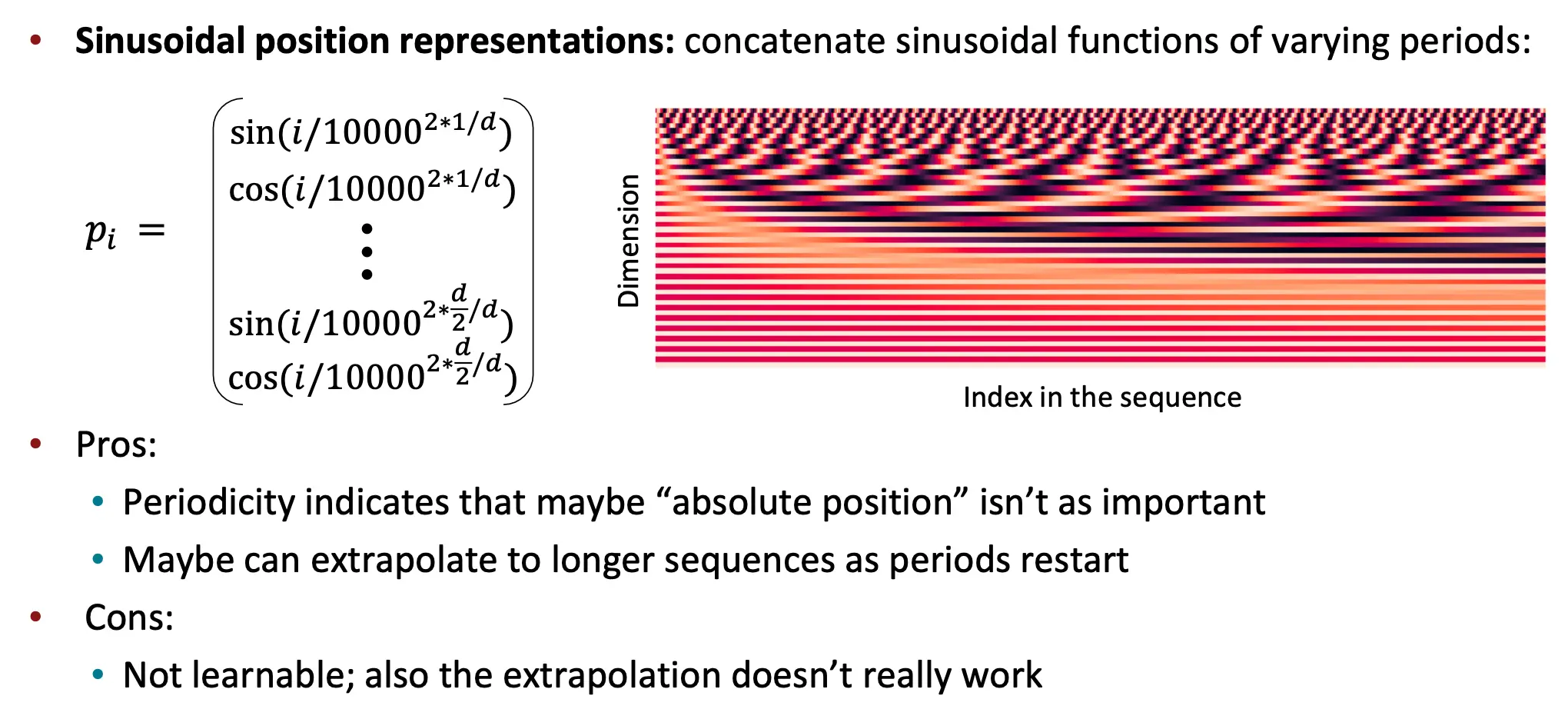
优点(Pros)
- 周期性捕捉相对位置关系:
- 正弦和余弦的周期性使得模型可以捕捉序列中相对位置的关系,而不仅仅是绝对位置。
- 这表明绝对位置可能并不重要,模型更关注相对位置。
- 外推能力:
- 理论上,正弦位置编码可以推广到比训练时更长的序列,因为正弦和余弦函数是无限周期的。
缺点(Cons)
- 不可学习:
- 正弦位置编码是固定的,不能通过训练调整。这可能限制了模型对某些特定任务的适应能力。
- 可学习的位置编码(Learnable Positional Encoding)可以在训练过程中优化,但正弦编码无法做到这一点。
- 外推能力有限:
- 尽管正弦编码理论上可以外推到更长的序列,但实际效果并不好,因为模型可能无法很好地利用这些周期性信息。
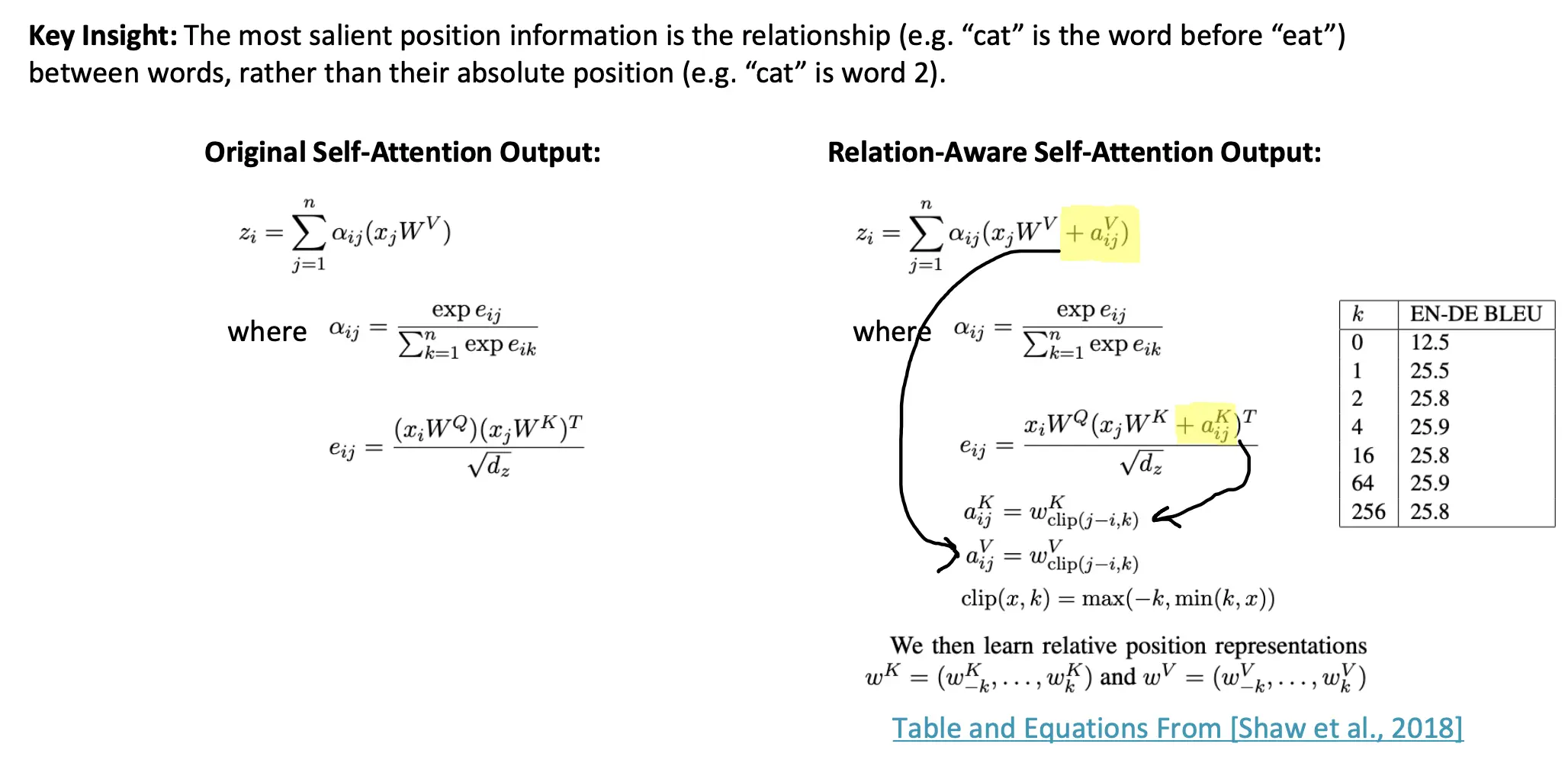
相对位置编码
传统的 Transformer 使用绝对位置编码(如正弦位置编码)来表示序列中每个位置的位置信息。然而,许多任务中更重要的是词与词之间的相对关系,而非绝对位置。例如:
- 在句子 "The cat eats" 中,"cat" 是 "eats" 的前一个词,这种相对位置关系比 "cat" 在句子中的绝对位置更重要。 这张幻灯片提出了一种改进的方式:将相对位置编码引入到自注意力机制中,以更好地捕捉词与词之间的相对关系。 相对位置偏置 aijK 和 aijV 的具体定义如下:
- j−i:表示第 jj 个位置相对于第 ii 个位置的偏移量(即相对位置)。
- clip(j−i,k):将相对位置限制在 [−k,k] 的范围内,避免过大的偏移量。
- wK 和 wV:分别为键和值的相对位置权重,这些权重是可学习的参数。
原始的自注意力输出公式如下:
注意力权重 (\alpha_{ij}) 是通过 softmax 正规化后的注意力分数 (e_{ij}) 得到的:
而 (e_{ij}) 是由查询向量和键向量的点积计算得到的:
在引入相对位置编码后,自注意力的公式变为:
其中,注意力分数 (e_{ij}) 也被修改为:
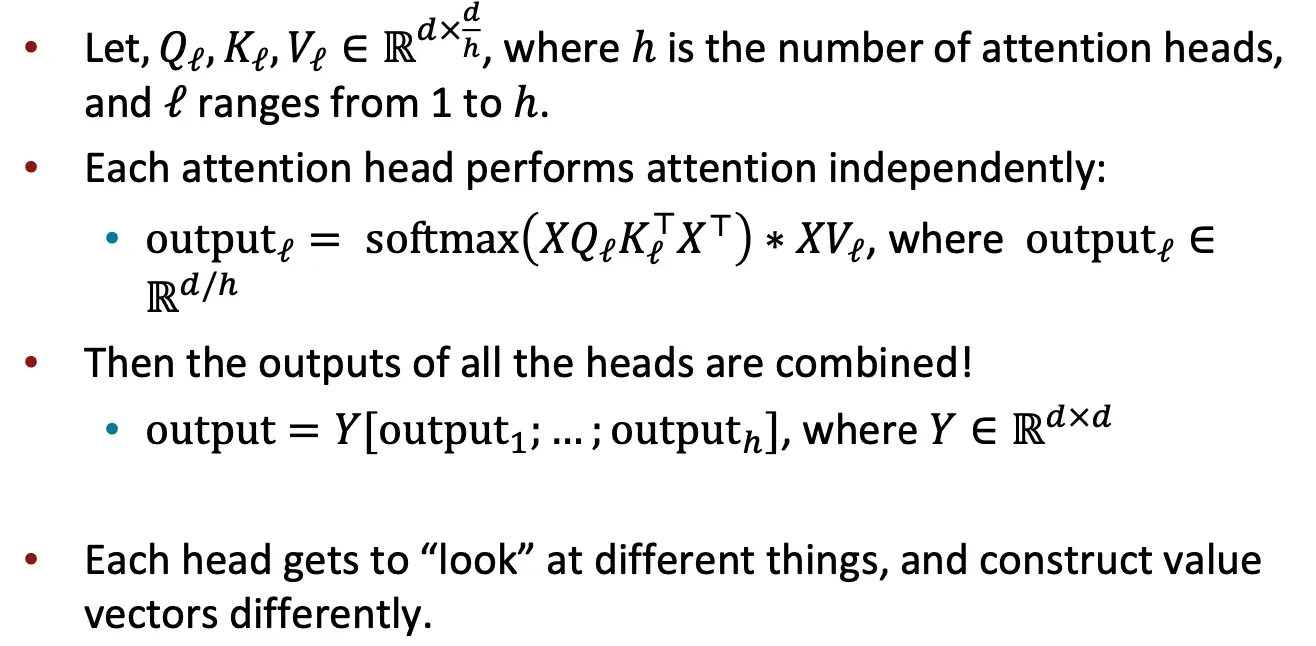
Multi-Headed Self-Attention: k heads are better than 1!
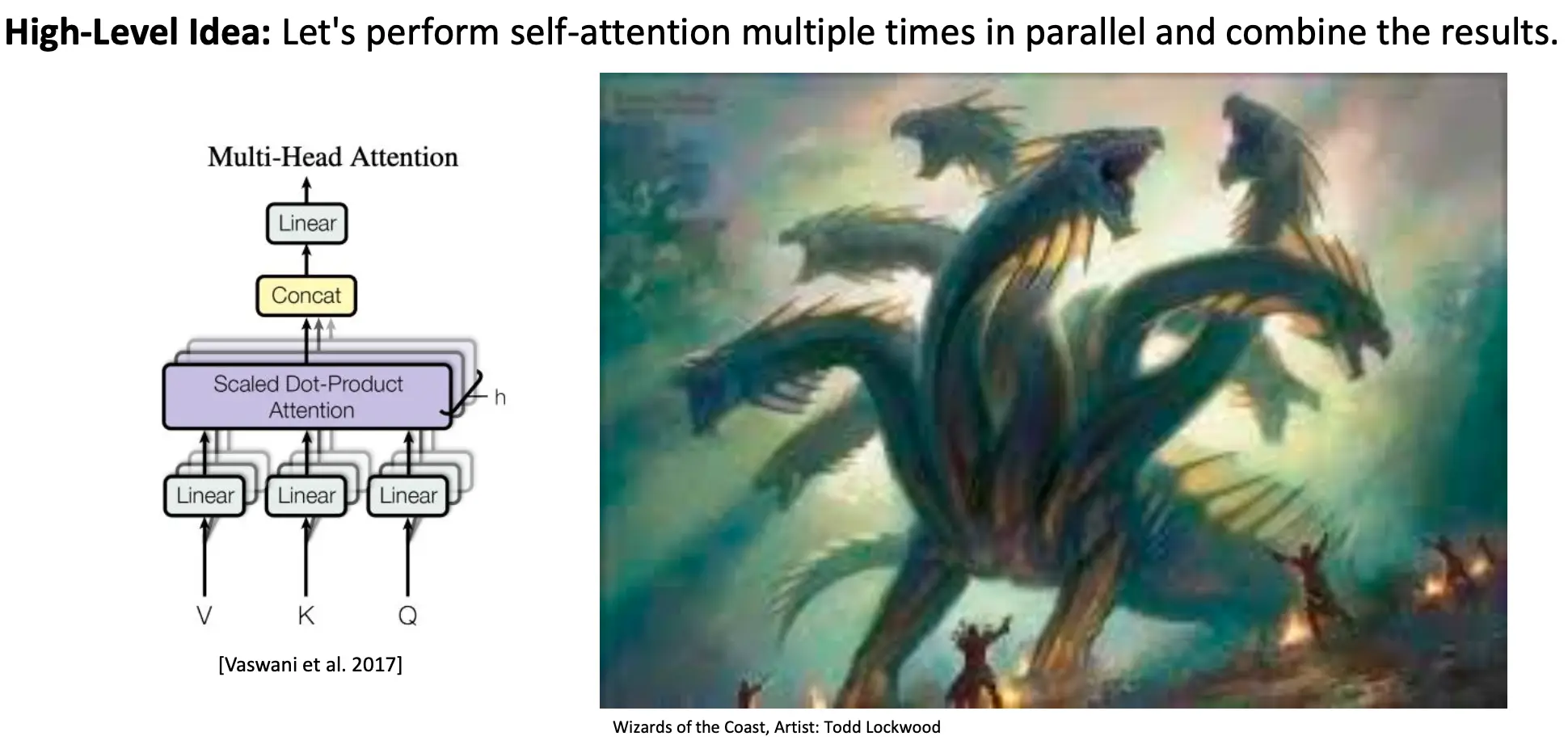
在真实的情况下,一个词可能由于不同的原因focus on不同的词,所以我们希望用多头,不同的头去处理一个层面的原因。
Transformer Decoder
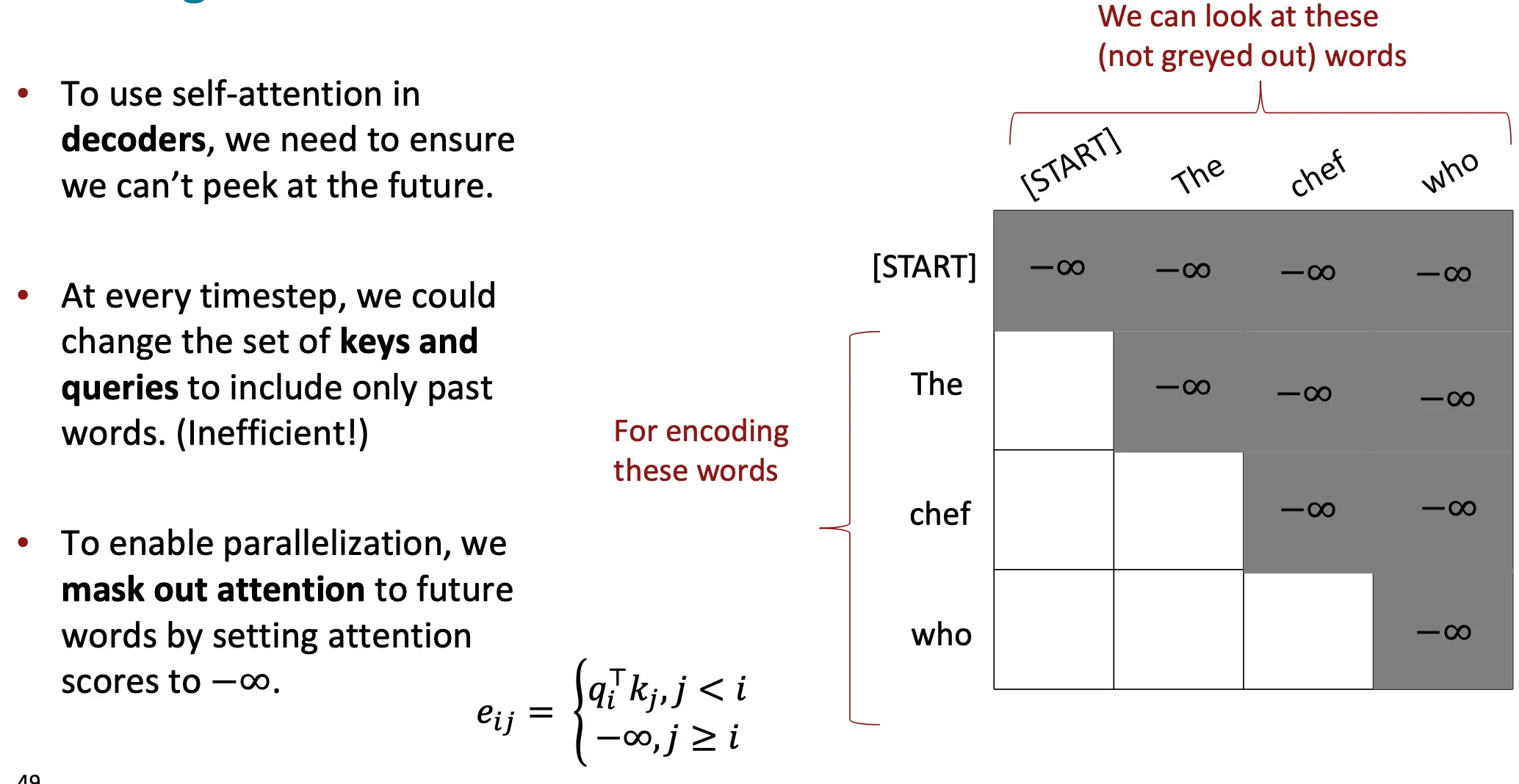
在序列生成任务(如机器翻译或文本生成)中,解码器需要逐步生成目标序列的每个词。例如: 在生成第 t 个词时,解码器只能看到已经生成的前 t−1 个词,而不能提前看到后续的词(即未来的词),否则会导致“作弊”,模型直接利用未来信息生成当前词。 如果不加以限制,解码器的自注意力机制会允许每个位置的词看到整个序列(包括未来词),从而破坏训练目标。
为了解决上述问题,在训练 解码器的时候使用了 掩码多头自注意力机制,通过掩码(mask)限制解码器只能关注当前词及其之前的词,屏蔽掉未来的信息。
掩码的作用
- 在计算注意力分数时,对未来的词(即目标序列中当前词右侧的词)施加一个负无穷大的权重,使得它们的注意力分数在 softmax 后变为 0。
- 这样,解码器只能利用当前词及其之前的上下文信息。
Cross Attention
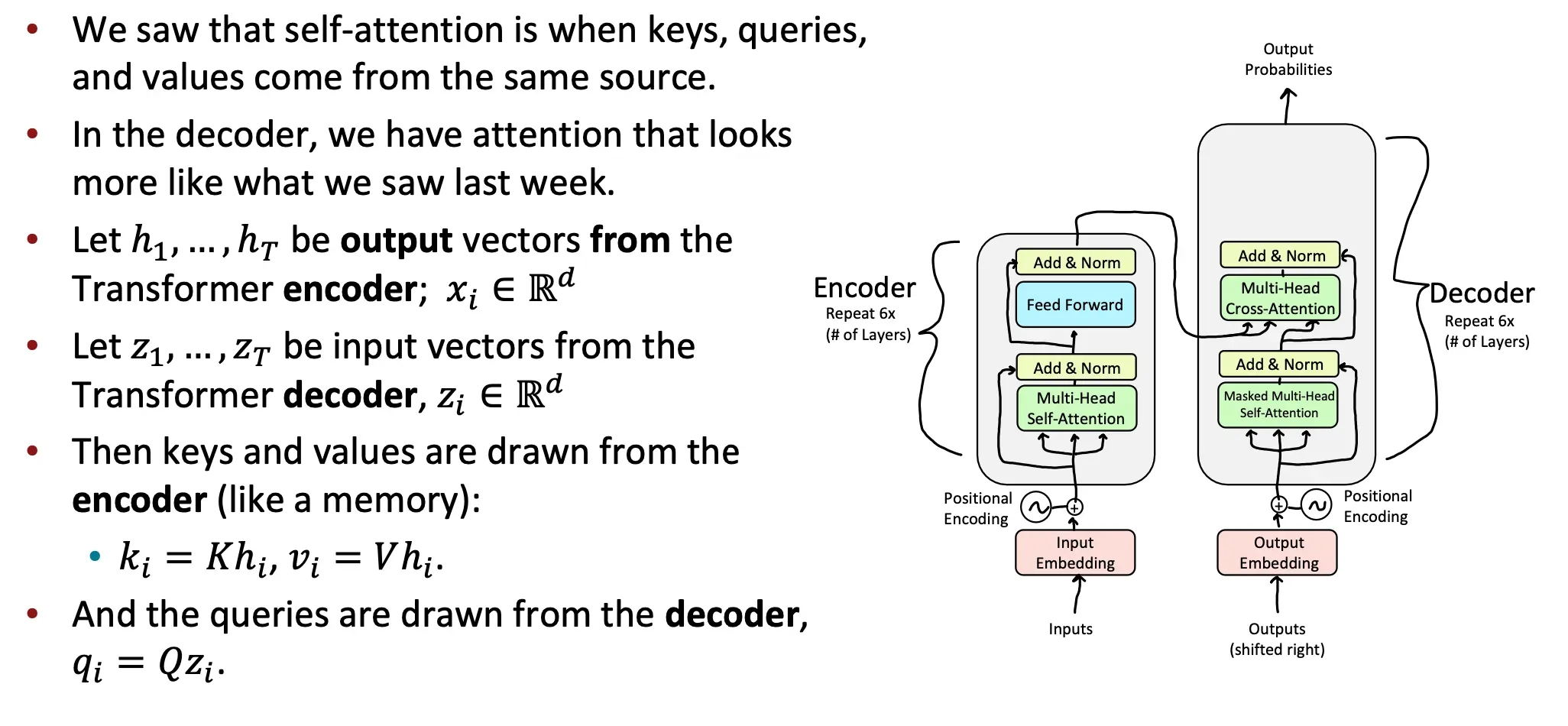
- 编码器输出 ( h_1,
, h_T ):编码器生成的上下文向量,表示输入序列的全局信息,供解码器使用。 - 解码器输入 ( z_1,
, z_T ):目标序列的嵌入表示,逐步生成目标序列。 - 键 (Key) 和 值 (Value):从编码器的输出中计算得出,具体公式为:
- 查询 (Query):从解码器的当前状态中计算得出,公式为:
最后:
Drawbacks and Variants of Transformers
问题:
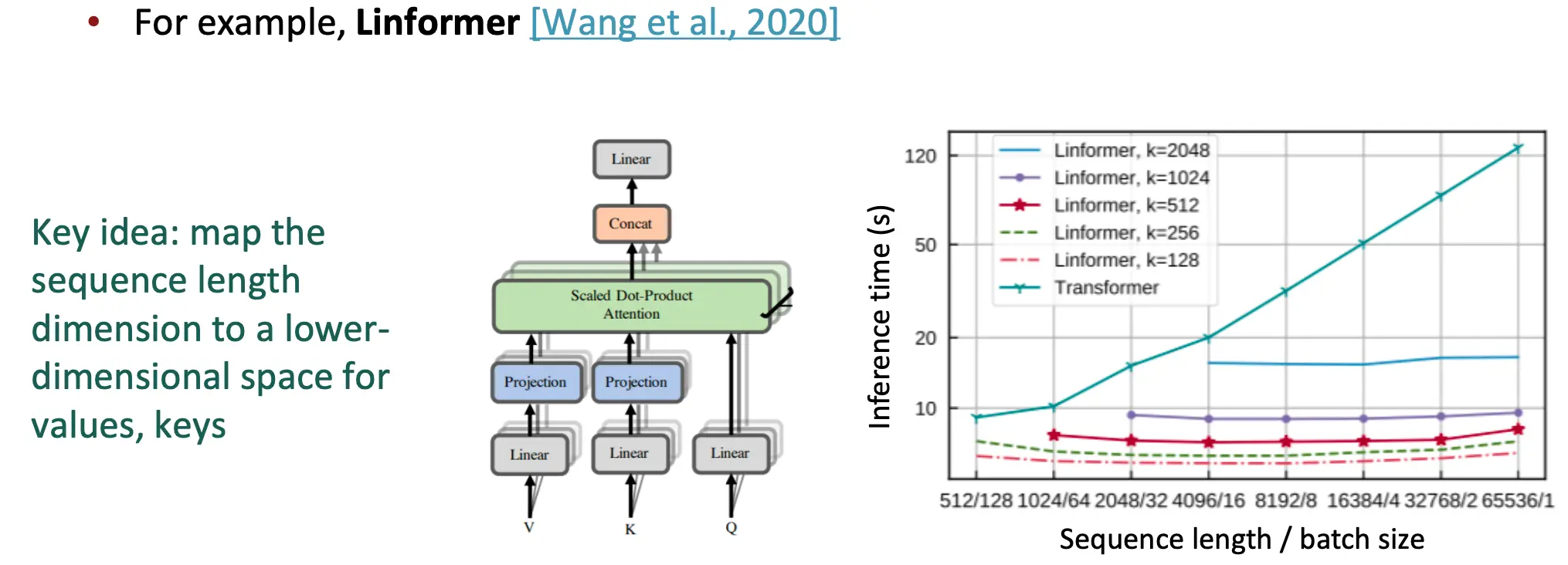
- 自注意力中的二次计算:计算所有交互对意味着我们的计算随着序列长度呈二次增长!对于RNN,呈线性增长! 最近已经有相当多的工作投入到这个问题中,我们能否构建像Transformer这样的模型,而不需要支付𝑂(𝑇^2)的全对自注意力成本?
随机注意力:
每个位置随机选择一部分其他位置进行交互,而不是与所有位置交互。窗口注意力:
每个位置只与其局部窗口内的若干邻近位置交互(例如,前后 3-5 个位置)。全局注意力:
在稀疏连接的基础上,保留一些全局交互,例如让部分特殊位置(如句子的开头或结尾)与所有位置交互。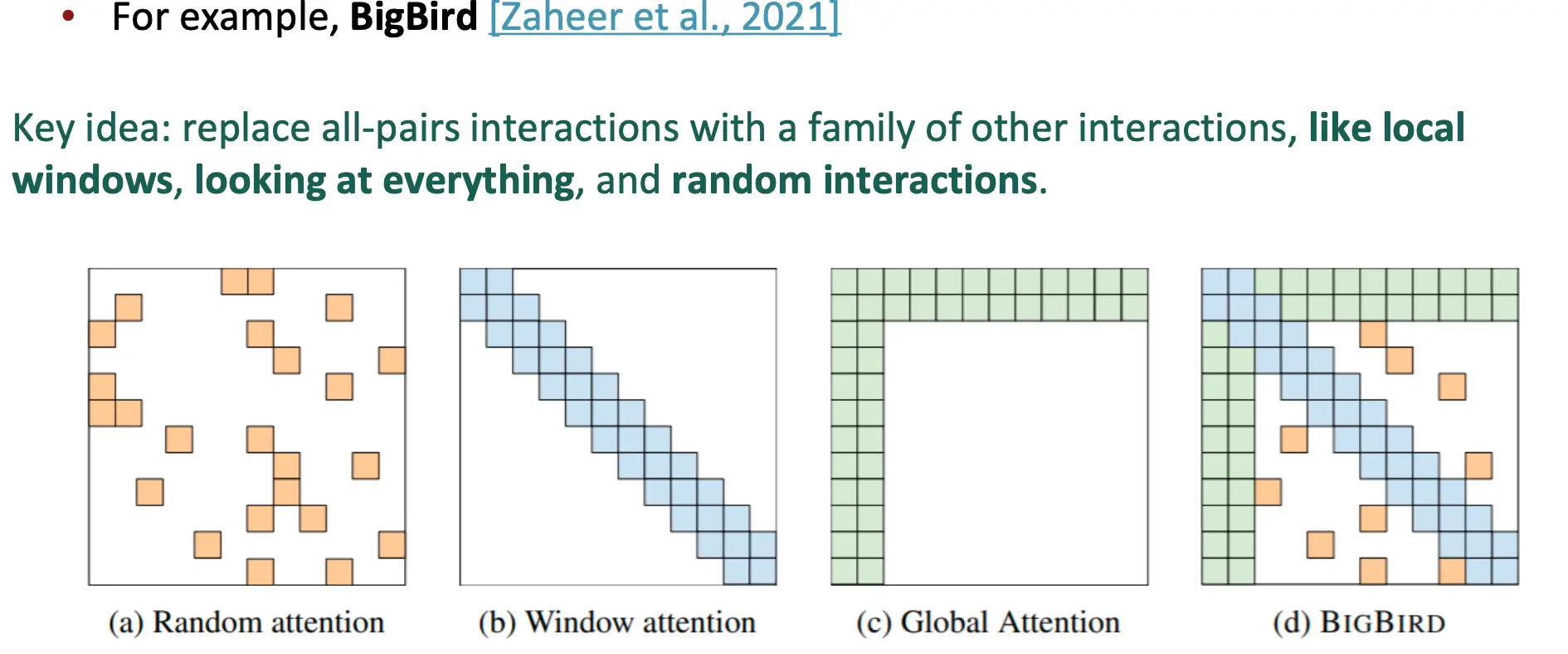
- 位置编码,位置表示
 然而没用,大多数对 Transformer 的改进在实际应用中并没有显著提升性能。
然而没用,大多数对 Transformer 的改进在实际应用中并没有显著提升性能。 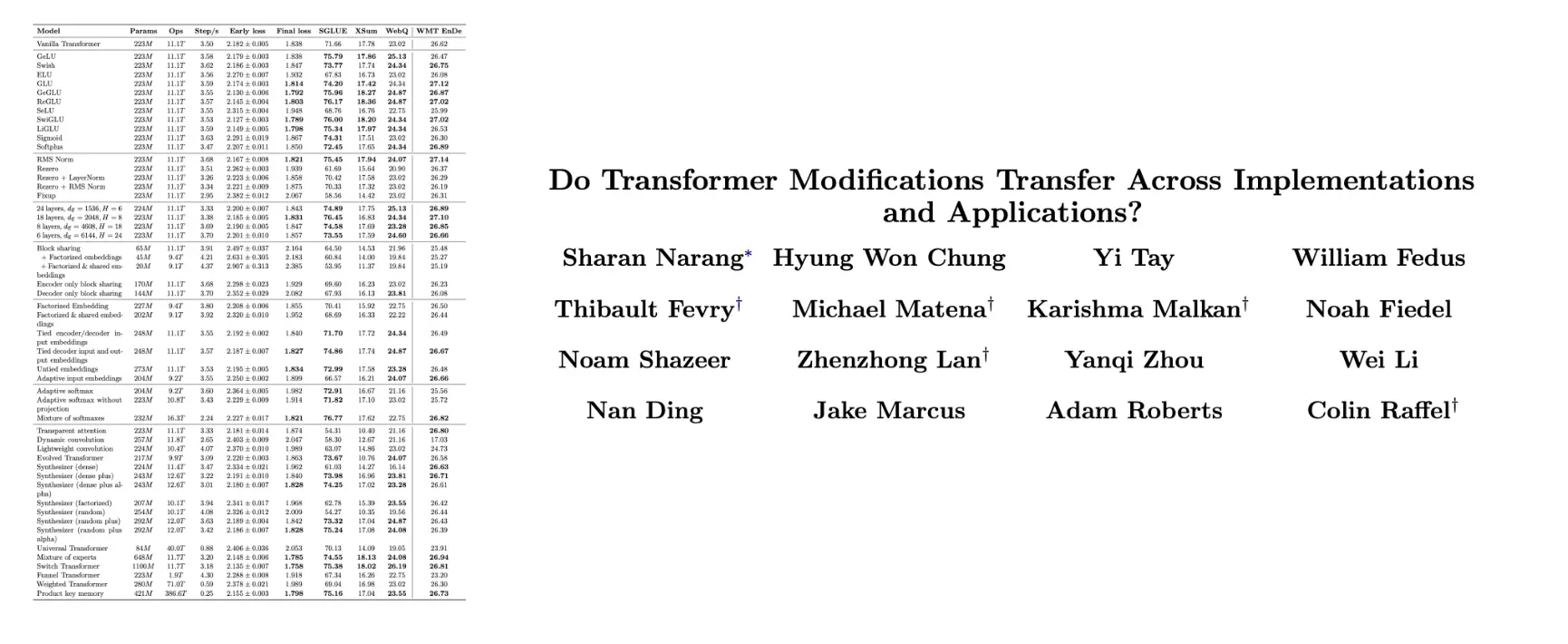
 Larry Shi
Larry Shi