Regularisation
有两种方式去克服过拟合
- Regularisation:踩刹车
- Cross-Validation:检查底线
VC分析正则
对于VC分析,我们的初识结论是这样的: 在概率 1-sigma(置信度为sigma)的情况下,有:
而这里面一般N和sigma都是固定的,所以我们可以简化为:
这里
我们尝试让这个惩罚项
这个式子也可以近似地看成:
所以,我们的目标就是,限缩H的复杂度,尝试把H9限制到H2,来让学出来的h更简单。
三种正则
硬正则
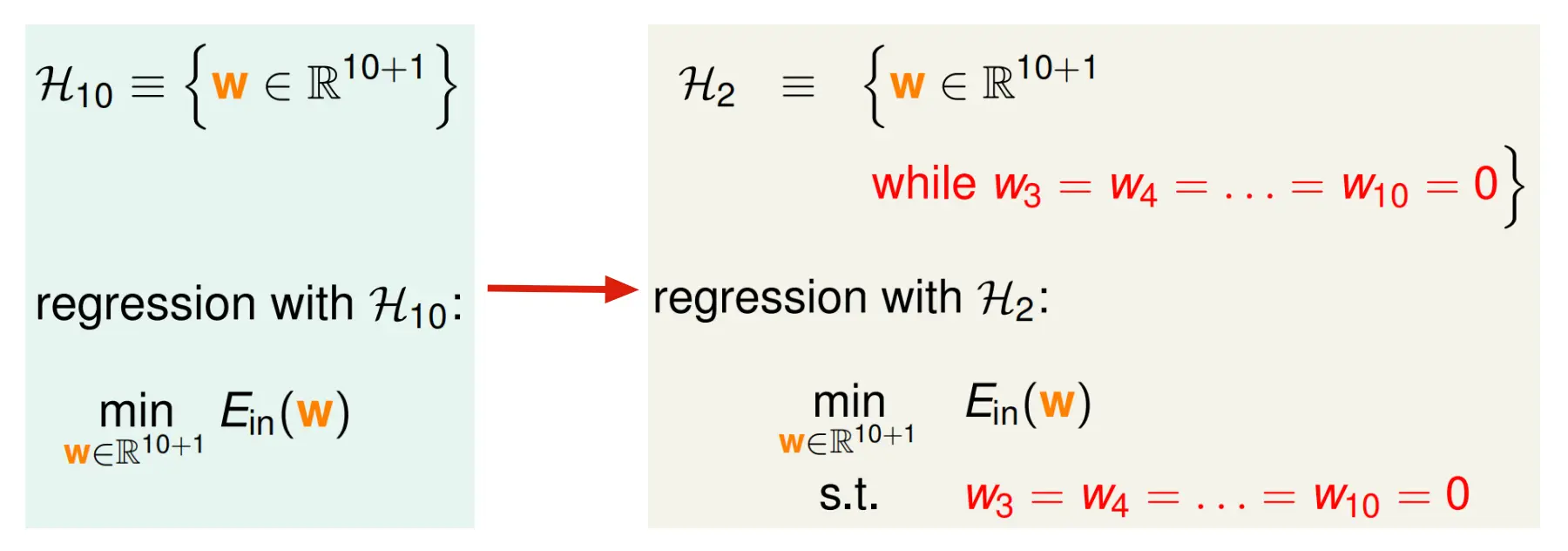 限制3-10位的w必须为0.不仅限制了w数量,也限制了哪一位为0,比较僵硬
限制3-10位的w必须为0.不仅限制了w数量,也限制了哪一位为0,比较僵硬
松正则 L0正则
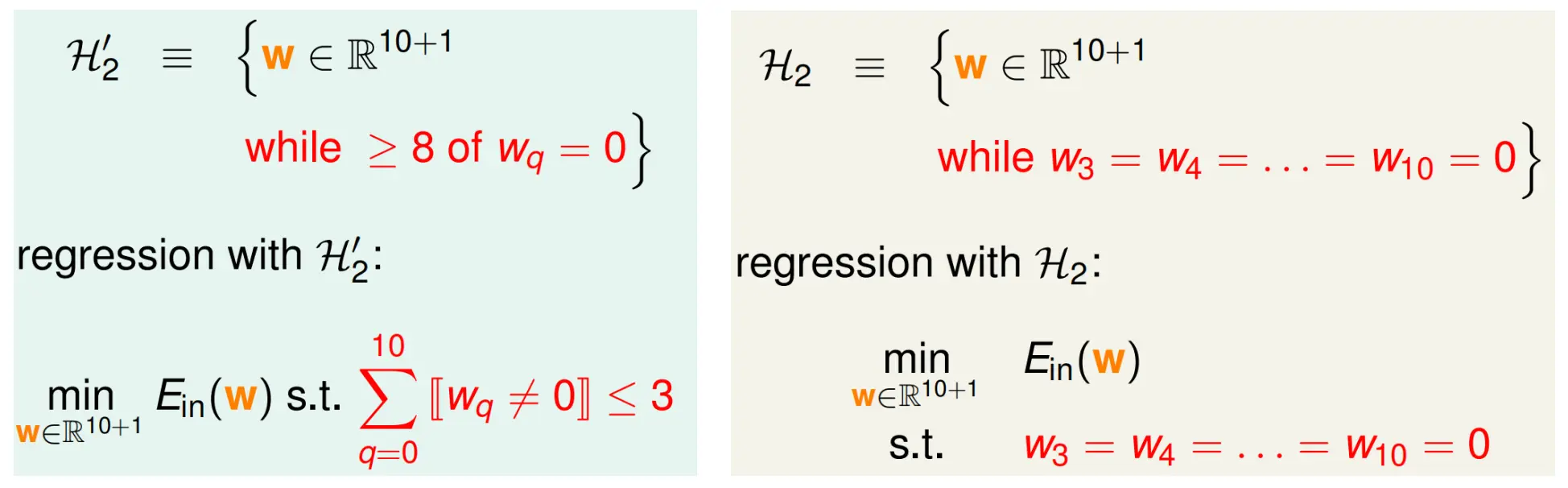 任意3位不为0就可以,只限制w数量,不限制w位置 属于NP-hard问题
任意3位不为0就可以,只限制w数量,不限制w位置 属于NP-hard问题
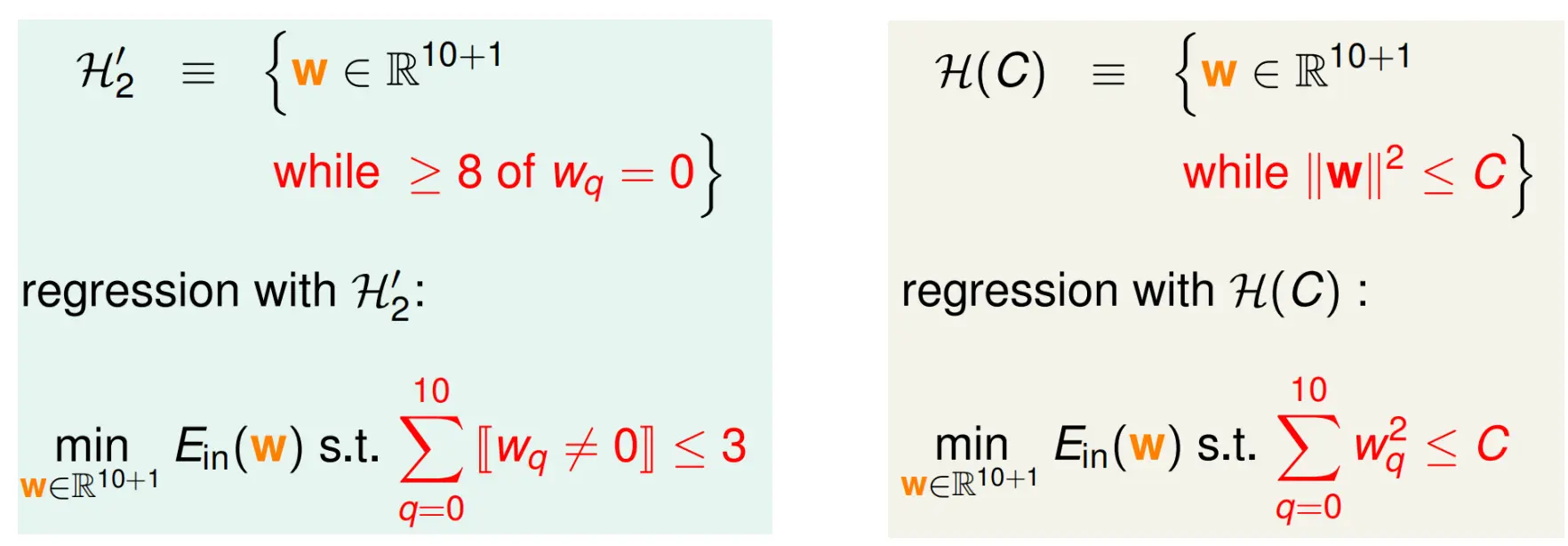
软正则 L2正则
正则 in use
我们用线性回归来举例子 我们首先把 (X,y) 通过核函数映射为 (Z,y) 然后Ein就可以写成:
那么最后w就可以表示为:
如果加上我们说的L2正则,那么我们的任务就变成了:
那么我们如何解决这种带约束的优化问题呢?采用拉格朗日乘子。
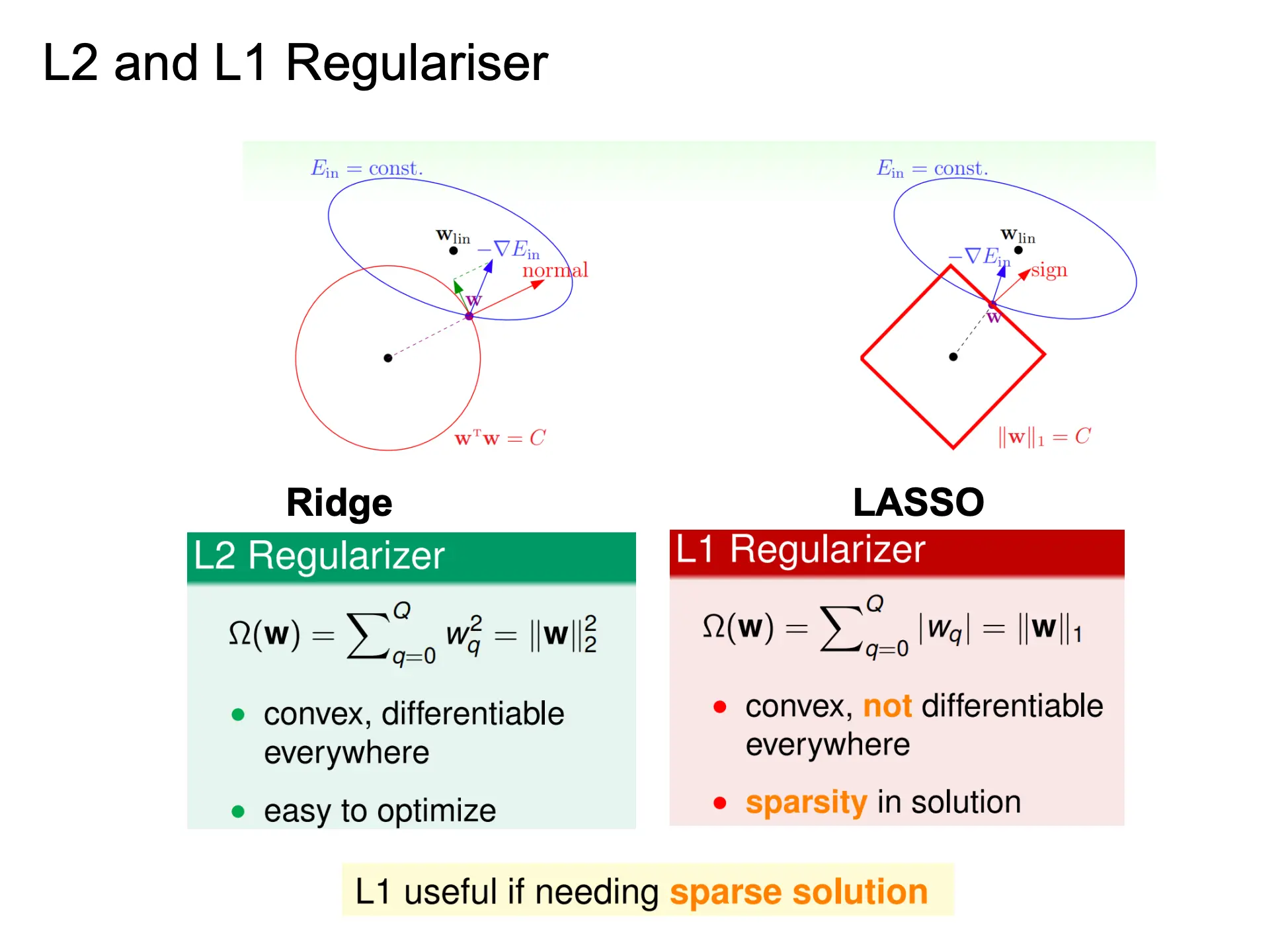
我们来结合几何图像来解释这个事情。
首先由于Ein可以写成:
这玩意经过数学变形后可以发现是一个正定二次型,画到坐标系里就是一个椭圆。 而正则项显然是个圆形。 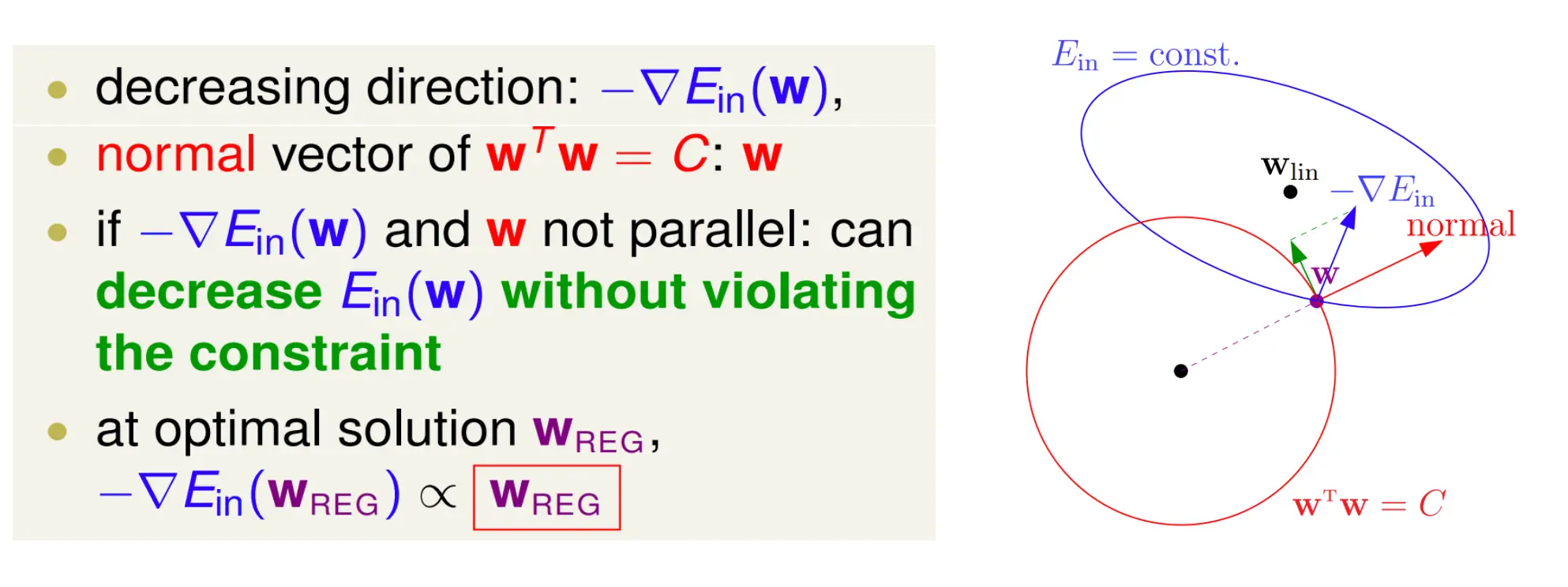 蓝色箭头
蓝色箭头
接下来我们进行推导。我们把约束转化为拉格朗日松弛形式:
互补松弛w求偏导为0:
(如果把1/N吸收到lambda中,就是常见形式了) 从上面得到的最优条件,可以看出它等价于在目标中添加一个L2正则:
这就是典型的Ridge回归,lambda或者2lambda/N就是正则强度。
Augmented Error
我们把这个东西叫做Augmented Error:
我们在这里就不去算它的梯度下降了,直接求w梯度为0的解析解。:
解得:
只要左边这玩意可逆,那么立刻可以看出:
当lambda为0的时候,可以看到就退回了无正则化的正常OLS解。 在这个过程中,lambda的选择是不太有解释性的。你需要用交叉验证选出使验证误差最小的那个。 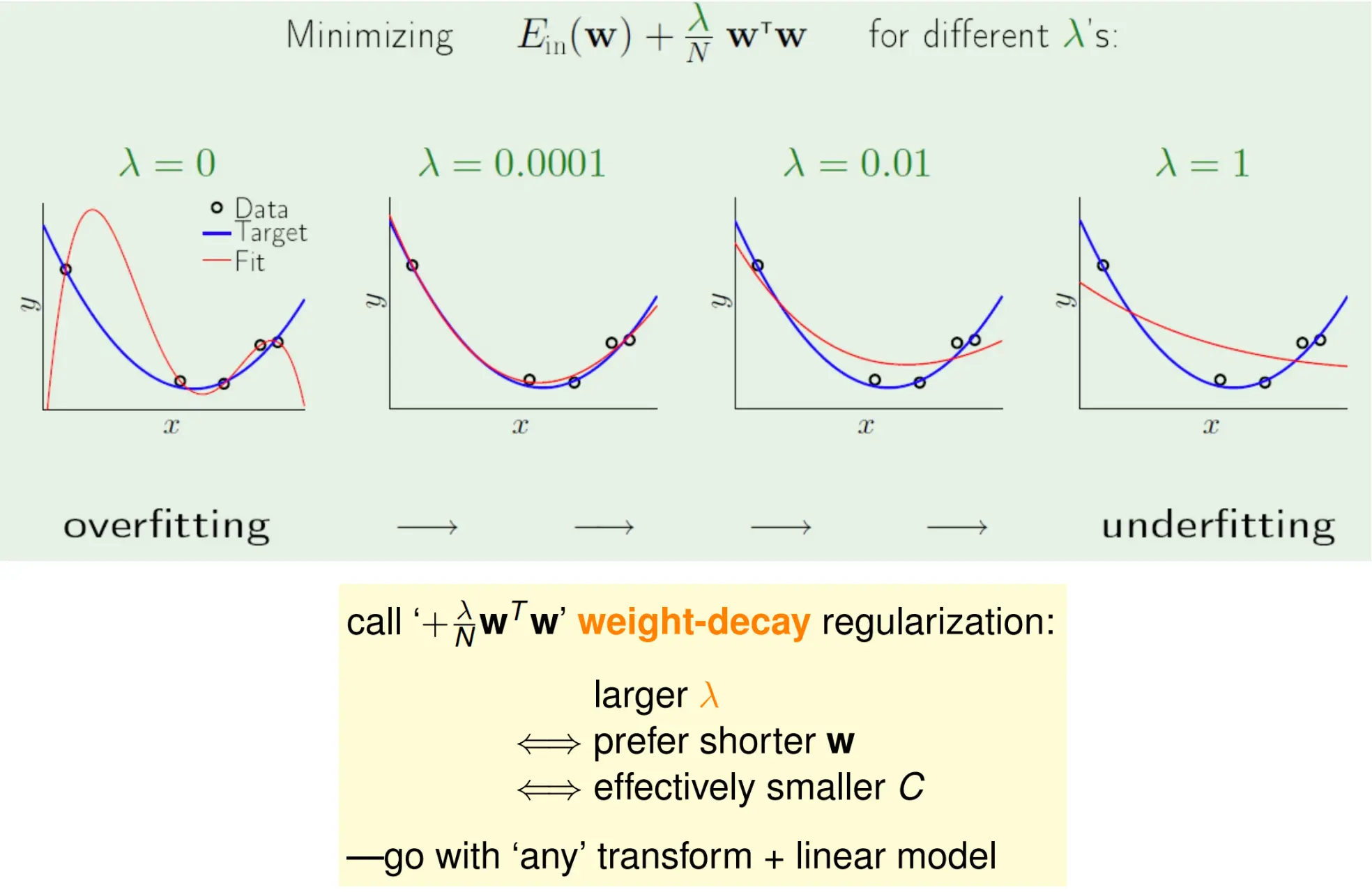 L2正则又叫weight-decay正则,更大的lambda会倾向于学出更短的w。适用于任何transform + linear
L2正则又叫weight-decay正则,更大的lambda会倾向于学出更短的w。适用于任何transform + linear
L2正则与VC分析
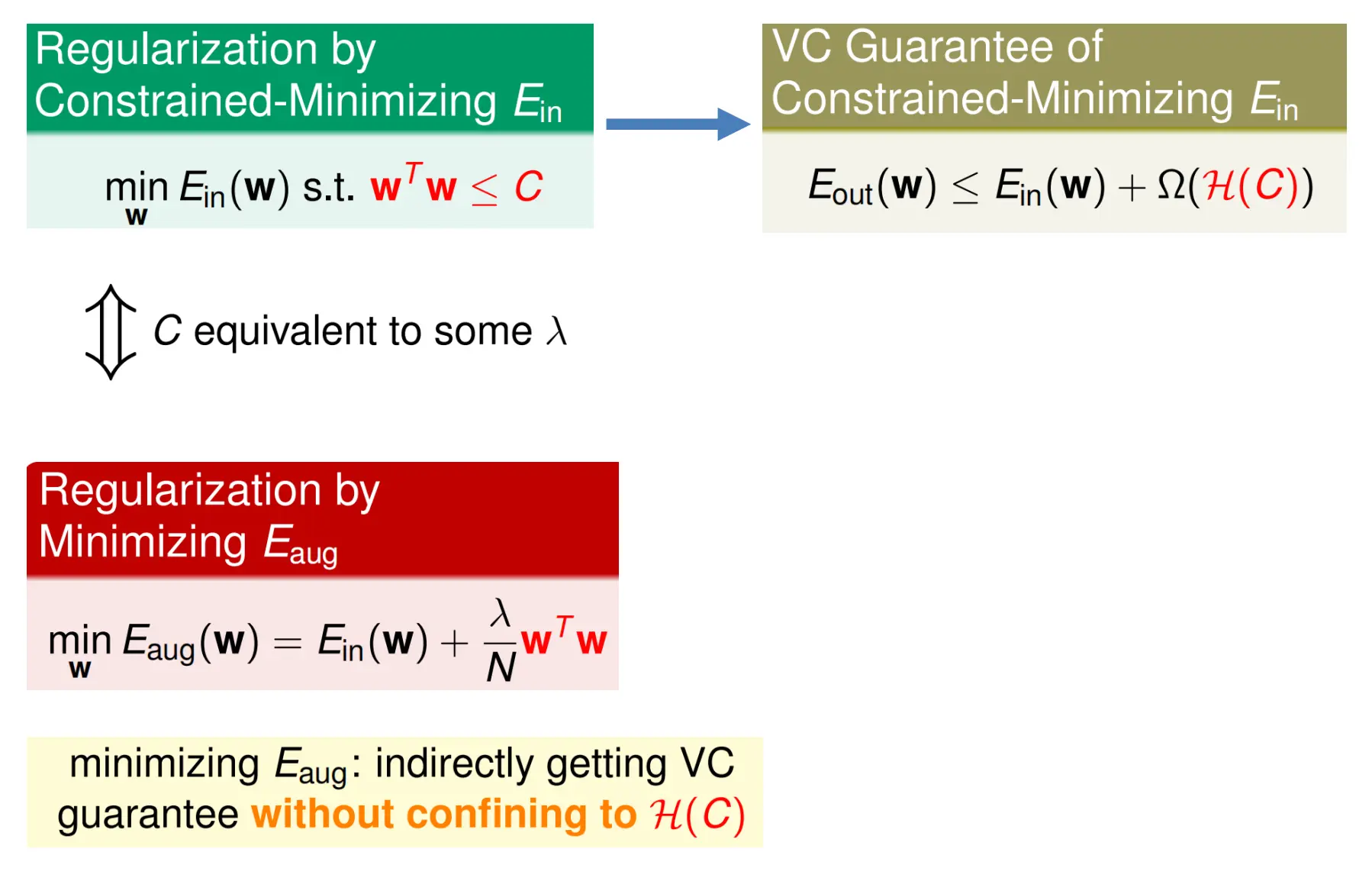 绿色的,我们把模型的空间软切到了C内。 黄色的,当我们软切之后,VC告诉我们我们会自动获得一个上界
绿色的,我们把模型的空间软切到了C内。 黄色的,当我们软切之后,VC告诉我们我们会自动获得一个上界
而其实正则化强度lambda和C是存在等价关系的。我们原来是一个受限的优化问题:
我们使用拉格朗日乘子将其转化为了一个带惩罚的最小化问题:
根据KKT条件我们有偏导为0:
等价于
存在某个映射C到lambda使得正则化既满足C又满足lambda。二者强对偶。
General正则
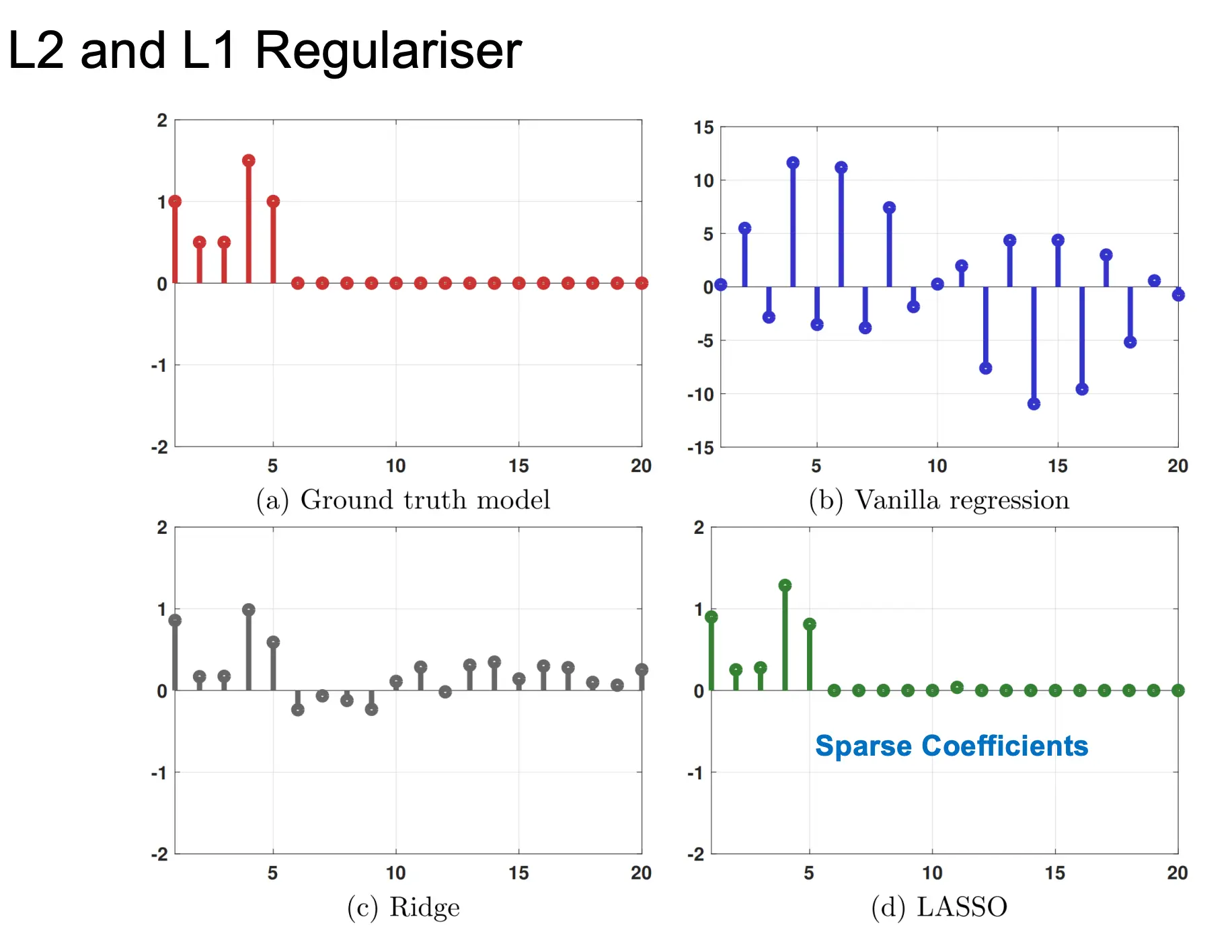
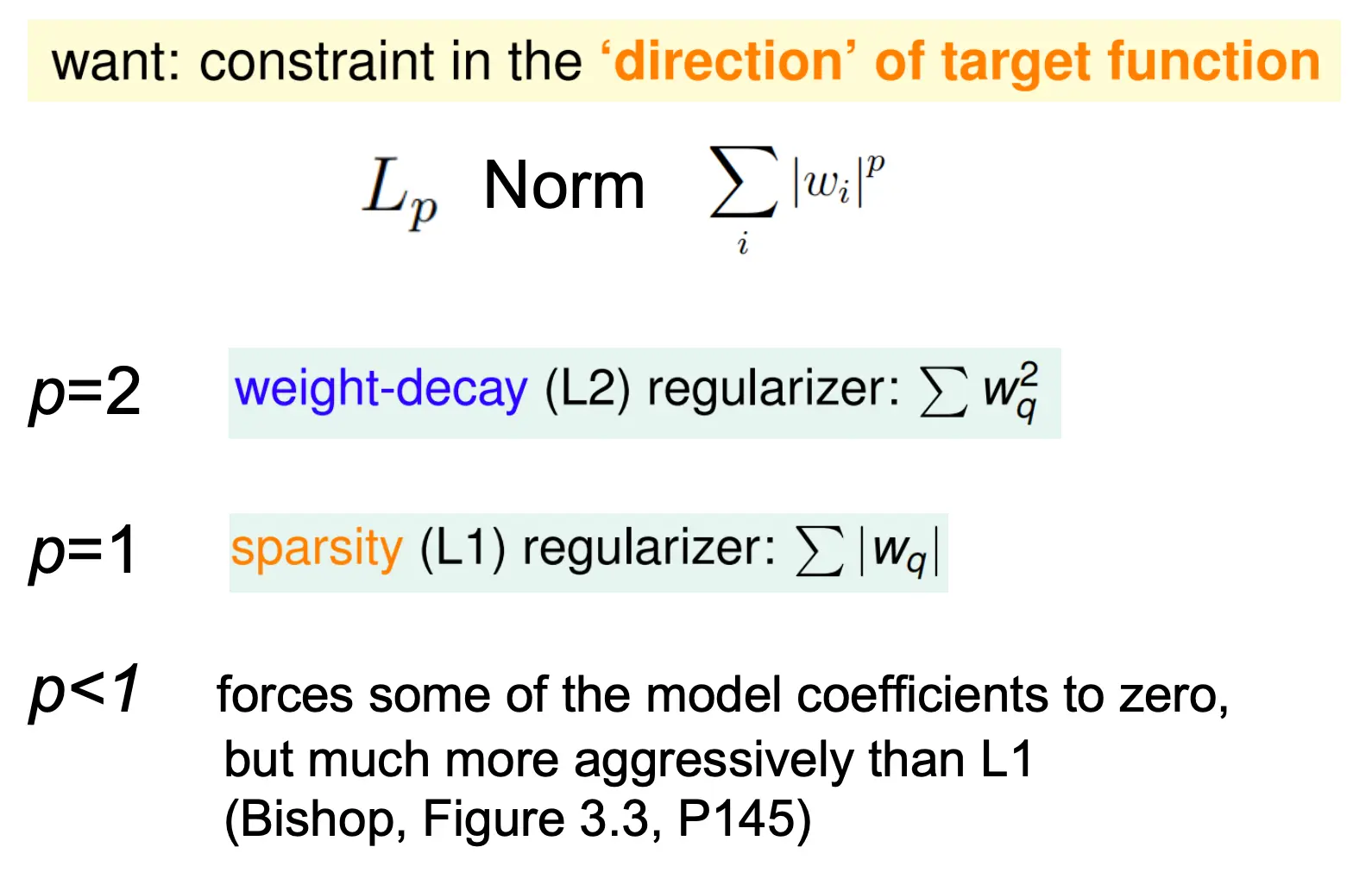 P=2就是L2正则(岭回归)。光滑的球面约束,能平滑地压缩所有权重。 P=1就是L1正则(LASSO),凸但不光滑的菱形等高面,会把一些权重恰好压到 0。得到一个稀疏解。 P<1是更激进的稀疏,等高面变得“更尖锐”,会比 L1 更猛烈地把绝大多数权重推向 0,得到更超稀疏的解。缺点是此时惩罚变得非凸,优化难度成倍增加(通常会陷入局部最优)。
P=2就是L2正则(岭回归)。光滑的球面约束,能平滑地压缩所有权重。 P=1就是L1正则(LASSO),凸但不光滑的菱形等高面,会把一些权重恰好压到 0。得到一个稀疏解。 P<1是更激进的稀疏,等高面变得“更尖锐”,会比 L1 更猛烈地把绝大多数权重推向 0,得到更超稀疏的解。缺点是此时惩罚变得非凸,优化难度成倍增加(通常会陷入局部最优)。
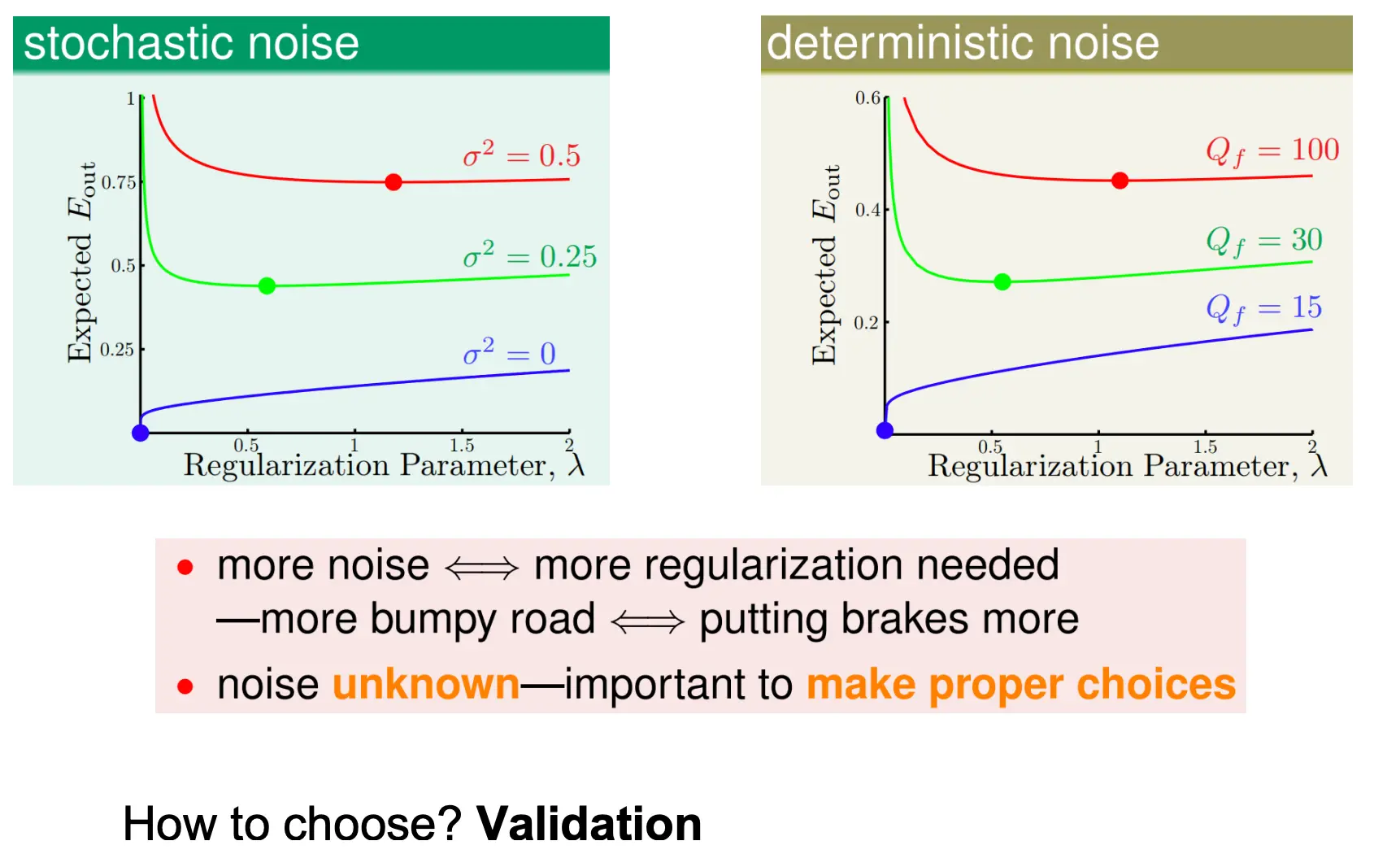 对于随机噪声,噪声越大越需要大的正则强度。 对于确定性噪音(就是目标模型复杂度Q),高复杂度需要更大的正则强度 噪声水平未知,所以我们必须用 交叉验证(Validation) 去自动选出那个最能降低验证误差的lambda
对于随机噪声,噪声越大越需要大的正则强度。 对于确定性噪音(就是目标模型复杂度Q),高复杂度需要更大的正则强度 噪声水平未知,所以我们必须用 交叉验证(Validation) 去自动选出那个最能降低验证误差的lambda
贝叶斯视角的正则
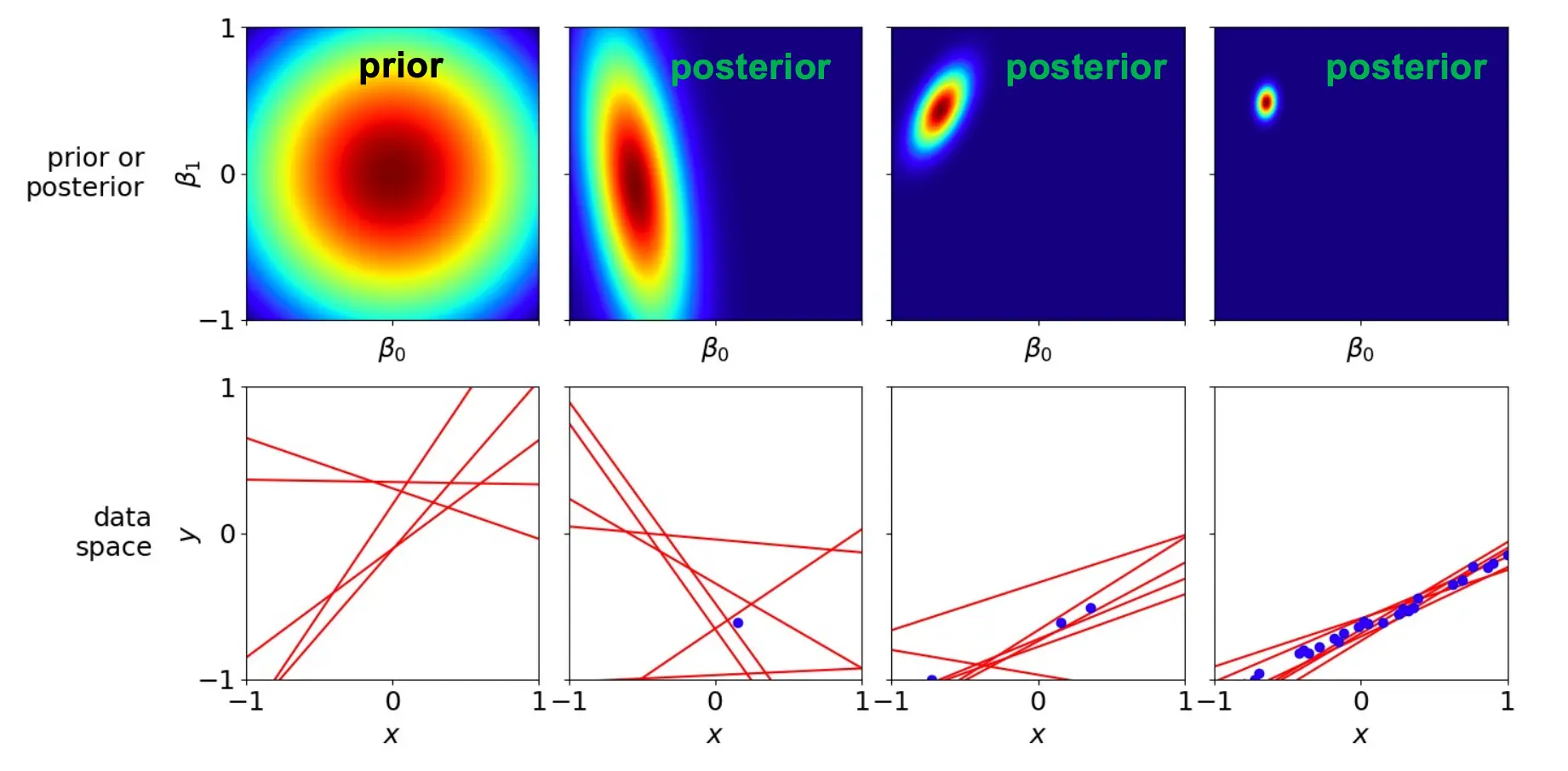 先验是一个“橡皮筋”防止少量数据把参数拉得离谱,只有先验的时候对权重是没有偏好的。 后验宽窄直接反映了我们对权重的不确定程度
先验是一个“橡皮筋”防止少量数据把参数拉得离谱,只有先验的时候对权重是没有偏好的。 后验宽窄直接反映了我们对权重的不确定程度
- 贝叶斯防过拟合:通过先验限制参数范围(相当于给参数加正则化),避免少量噪声把模型拟合得过弯。
- 先验是正则化器:在数据稀缺时“拉回”参数;在数据多时又会被似然主导,自动“松手”让模型自由拟合。
- 后验量化不确定性:后验分布越窄,我们越有信心这是“正确”参数;反之则说明数据或假设空间不足。
贝叶斯MAP
对于贝叶斯,完整的预测是从后验中采样几组w,然后把这些曲线在新输入点上的预测值求平均。 然而,对于高维的w来说,后验采样本身就很昂贵。所以我们推出MAP (Maximum a posteriori),后验模式点估计
核心思想有点像极大似然法,用概率最大者替代最优解:
在 Gaussian–linear 的情况下,这恰好等价于我们之前导出的 Ridge 解(或说是后验分布的均值)。
MAP情况下贝叶斯估计与L2岭回归解析式相同
我们用贝叶斯语言再来审视一遍线性回归 首先我们有N个观测 假设输出是一个带有高斯噪音的线性模型:
那么似然函数就是:
看到数据前我们有一个先验:
按照贝叶斯公式:
把两个高斯相乘,取指数,等号右边就变成了:
最后那一项看起来就是L2正则。 接下来用MAP点估计:
于是 MAP 解 等价 于我们用 L2 正则化做线性回归时得到的解析解。
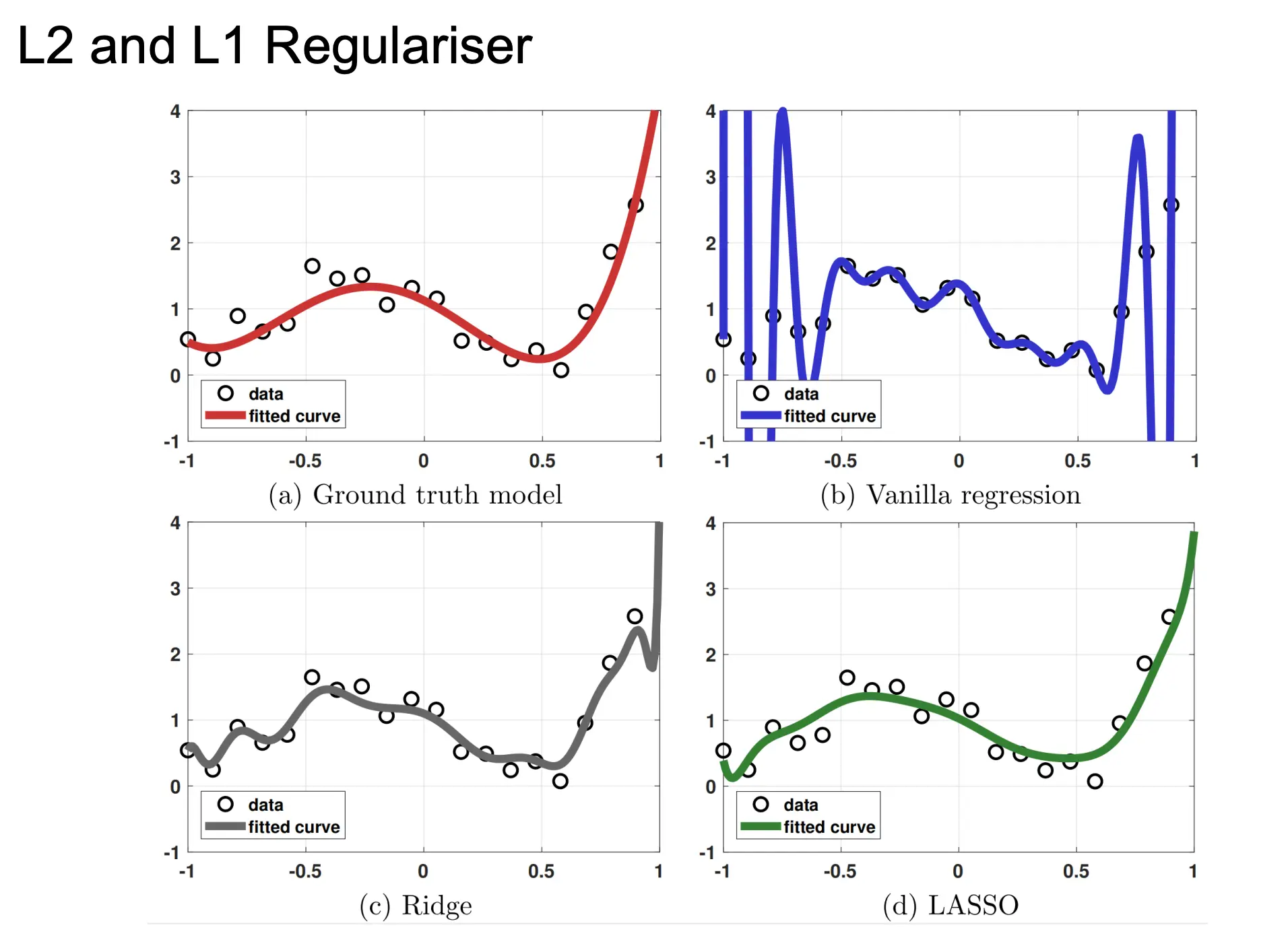
我们来看一下不带L2的MLE以及MAP的例子: 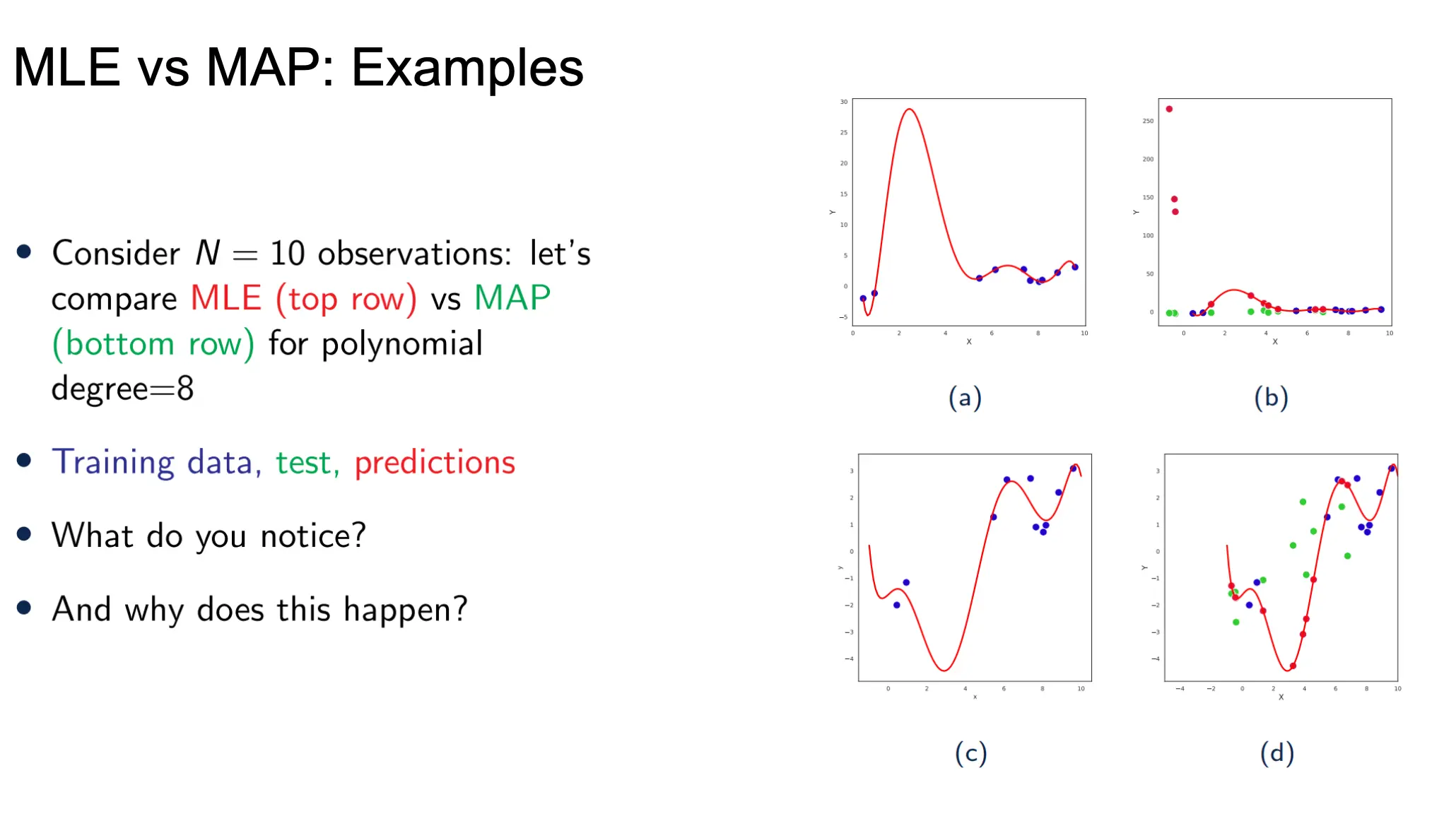 可以看到,当(a)数据比较干净的情况下,b中无正则MLE与有正则MAP差不多 但当c这种离群点比较多的情况下,不带正则的MLE在训练点覆盖不到的区域,预测完全是多项式的任性外推,很容易偏离真实趋势。 而带正则的MAP 先验让模型“往零靠”——在训练覆盖不到的地方曲线更平直——因而通常能提供更合理的外推。
可以看到,当(a)数据比较干净的情况下,b中无正则MLE与有正则MAP差不多 但当c这种离群点比较多的情况下,不带正则的MLE在训练点覆盖不到的区域,预测完全是多项式的任性外推,很容易偏离真实趋势。 而带正则的MAP 先验让模型“往零靠”——在训练覆盖不到的地方曲线更平直——因而通常能提供更合理的外推。
- 如果你只关心拟合精度、数据量充足、噪声又不极端,MLE(或 MAP 都差不多)就足够。
- 如果你在意鲁棒性、离群点多、样本稀疏、需要合理地外推到没见过的输入,带先验的 MAP/L2 正则化往往会给出更稳健的结果。
Takeaway Message
- 凡是训练模型,都试试加正则化
- 有噪声、样本少、目标太复杂时特别管用
- 只要 λ(正则强度)选得合适,收益往往大于风险
- 在现代深度学习里,更是随手可用
- 权重衰减(Weight Decay):L2 正则
- L1 稀疏化:让部分神经元连接权重变为零,便于压缩/剪枝。
- Dropout、BatchNorm、早停 等也可看作结构化的正则化手段。
总结
- MLE = OLS
- MAP = L2 正则化回归
- 高斯先验 ⇒ 二次正则项
- MAP 下的“二次惩罚”源自
,它会收缩(shrink)权重向量,使模型不至于随意挖掘噪声而过度弯折,从而减少过拟合。 - L1 正则:LASSO
- 如果把先验换成 拉普拉斯分布(Laplace),其对数正好给出L1正则
- 这就是 LASSO 正则化,它不仅收缩权重,还能把部分权重压成零,生成稀疏解,方便特征选择。
 Larry Shi
Larry Shi