Week 4 - Multicore, Concurrent & Sockets
Muticore
Recap: Memory Hierarchy
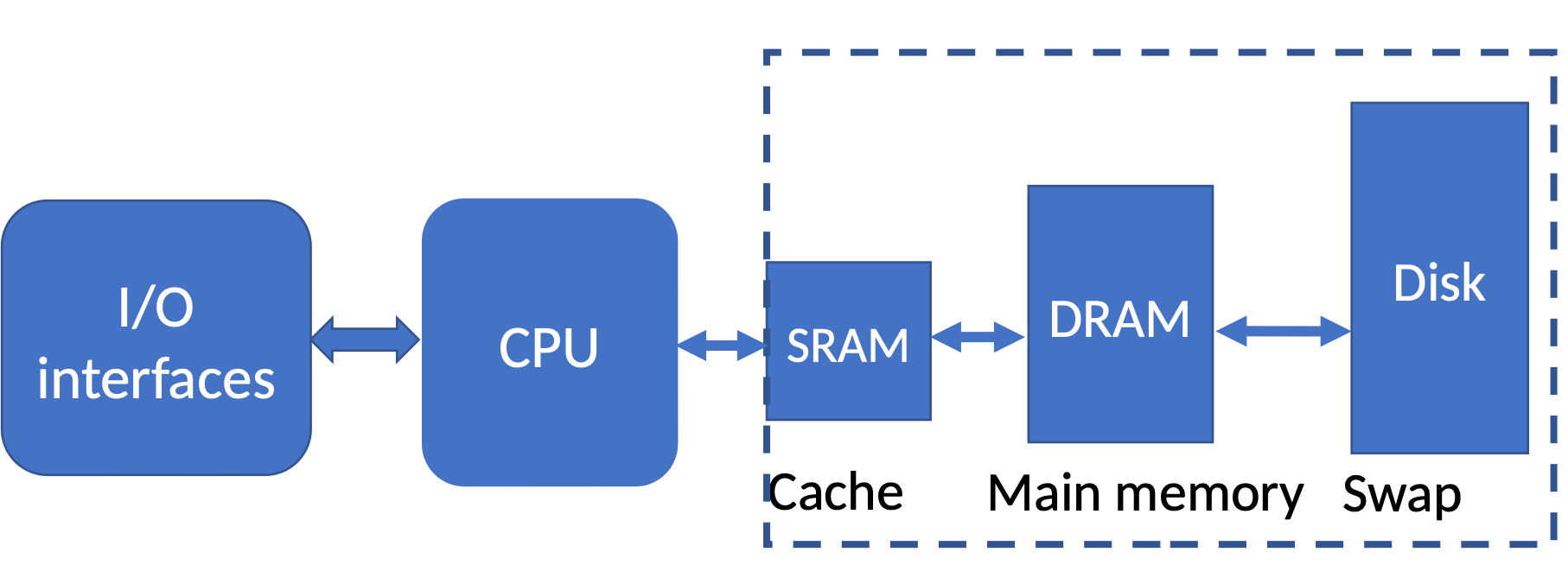
经过改造的von Neumann Computer。单核cpu
Applications are demanding more resources!
Alternative solution:
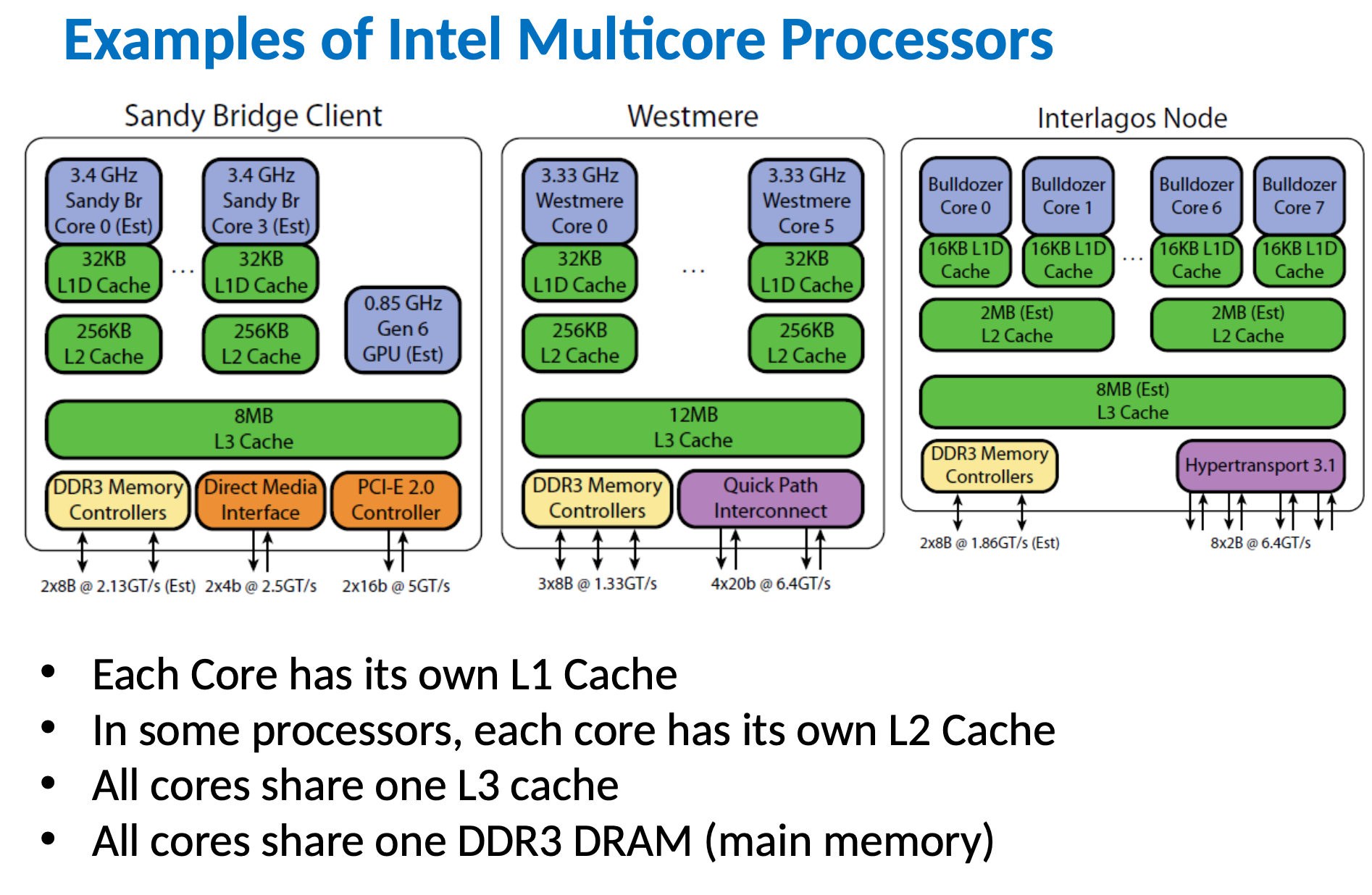
• Put many processing cores on the microprocessor chip.
• The number of cores doubles with each generation.
例子
所以简化后的架构为
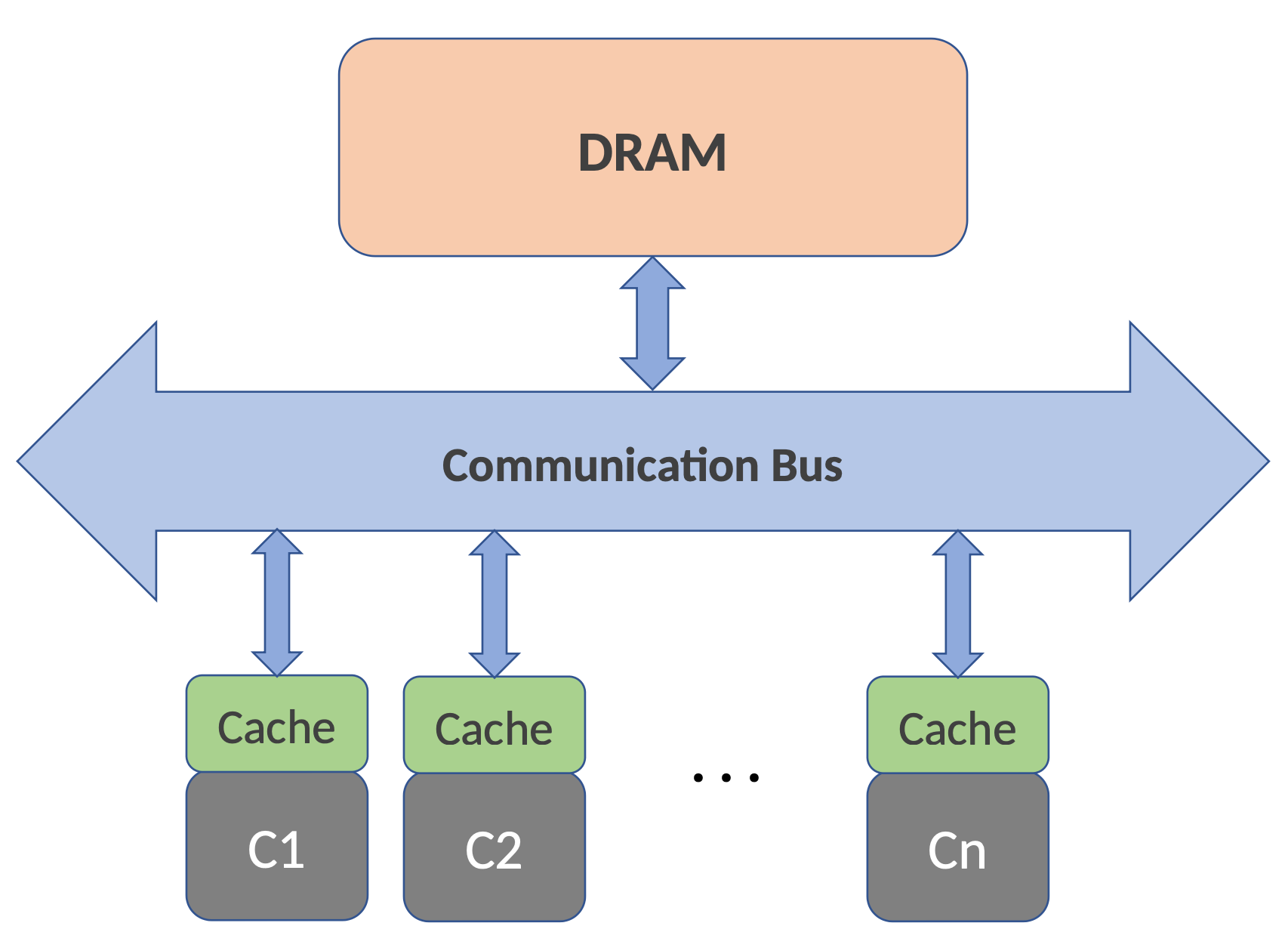
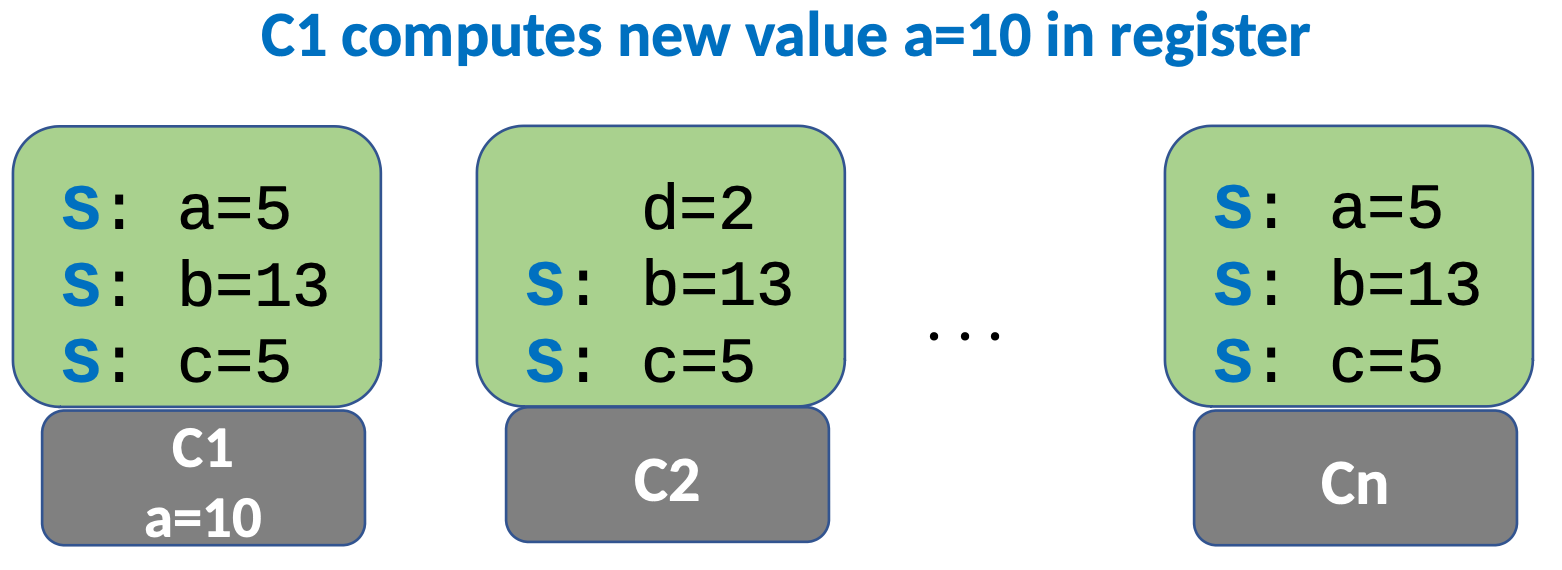
由于每个核有不同的cache,而多个核可能会对同一个数据进行修改,那么data coherence就很重要。
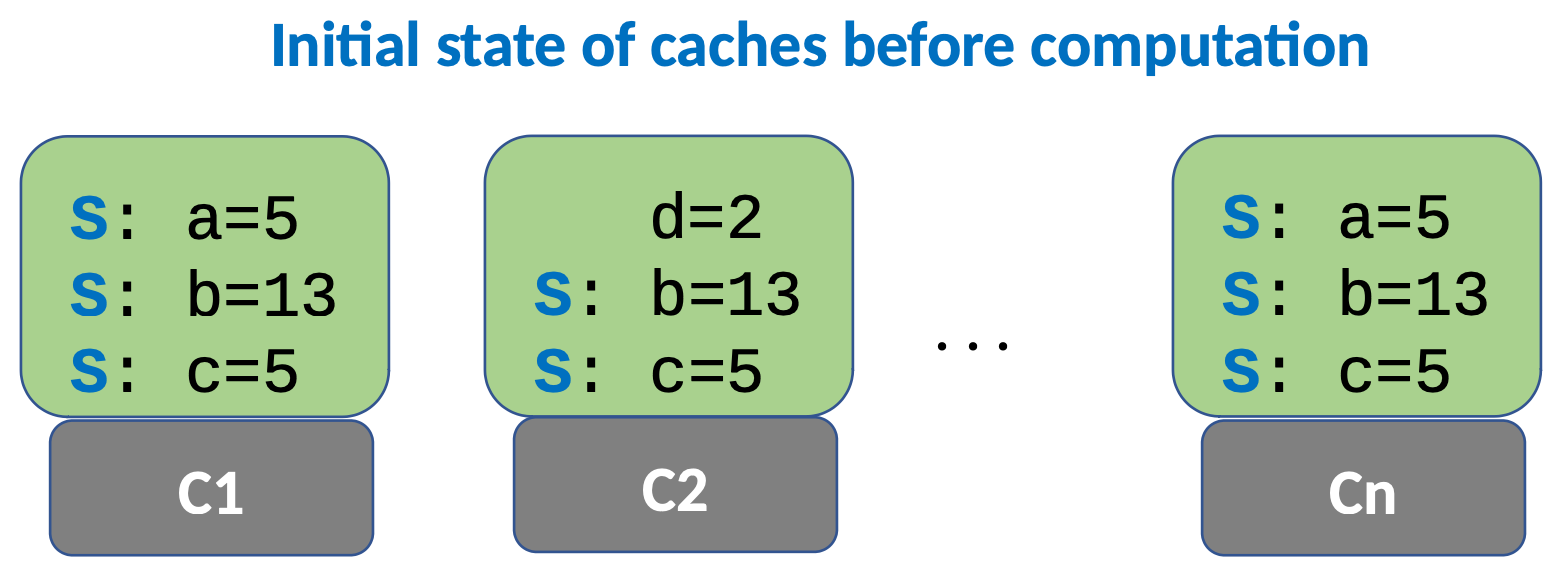
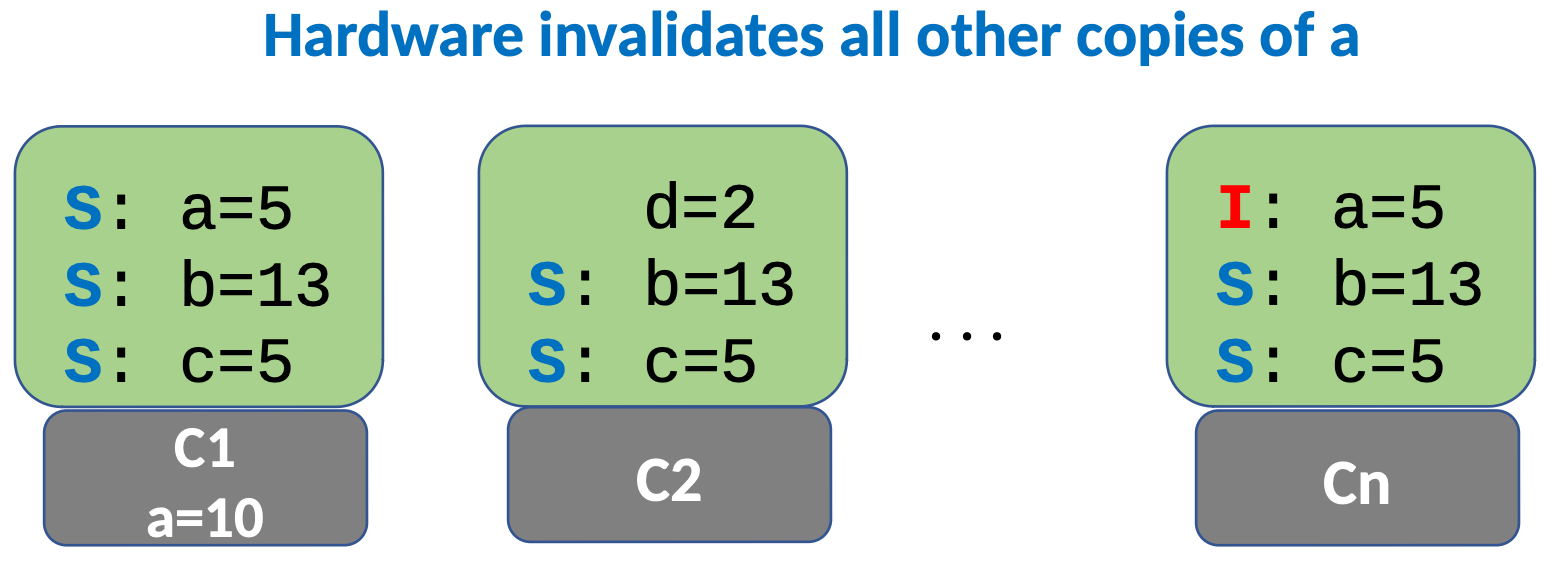
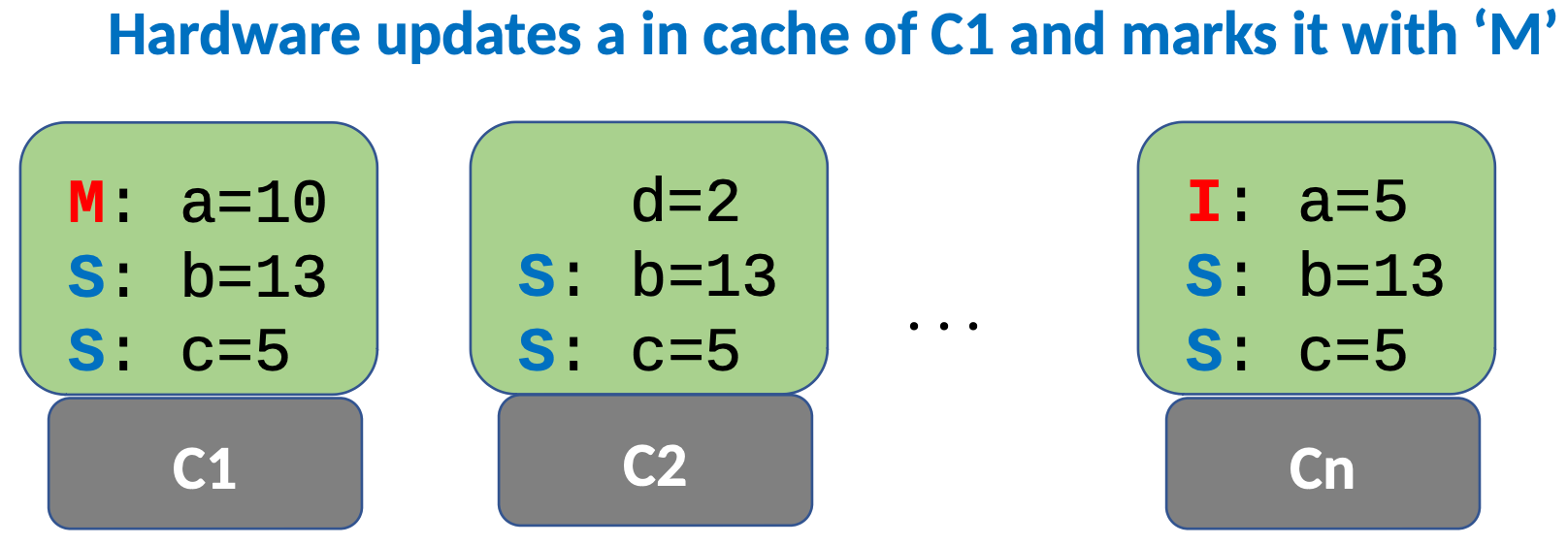
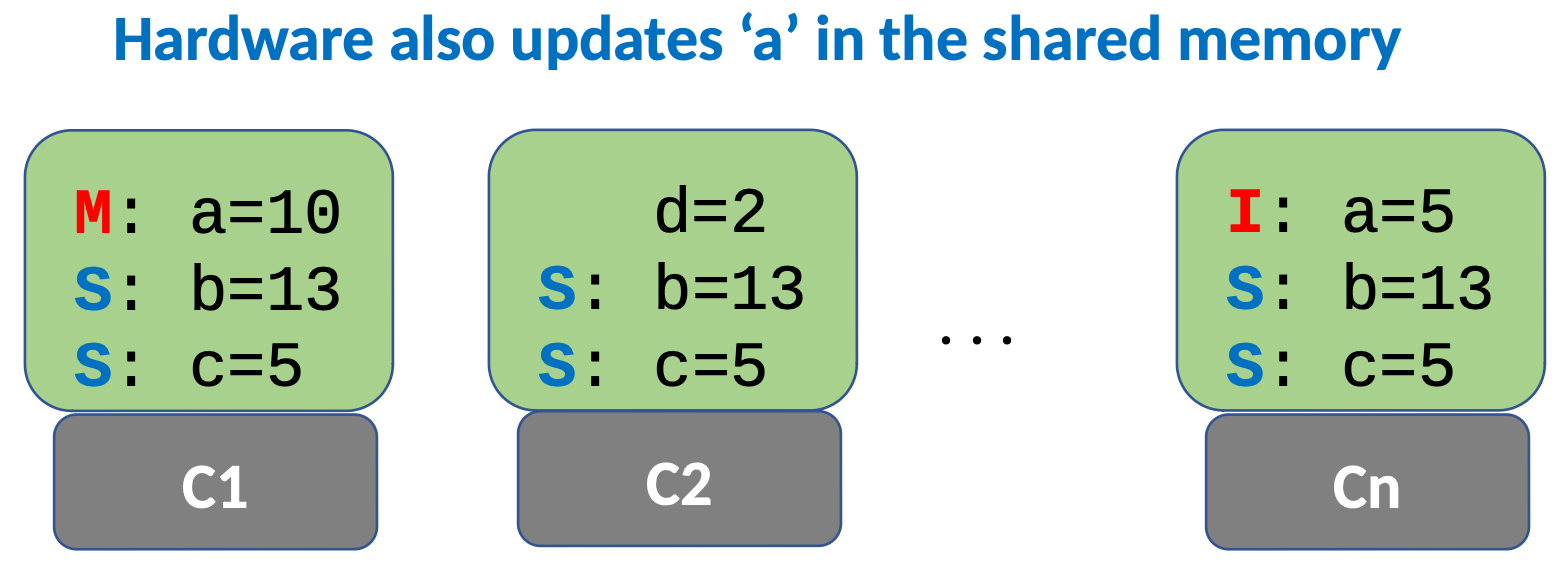
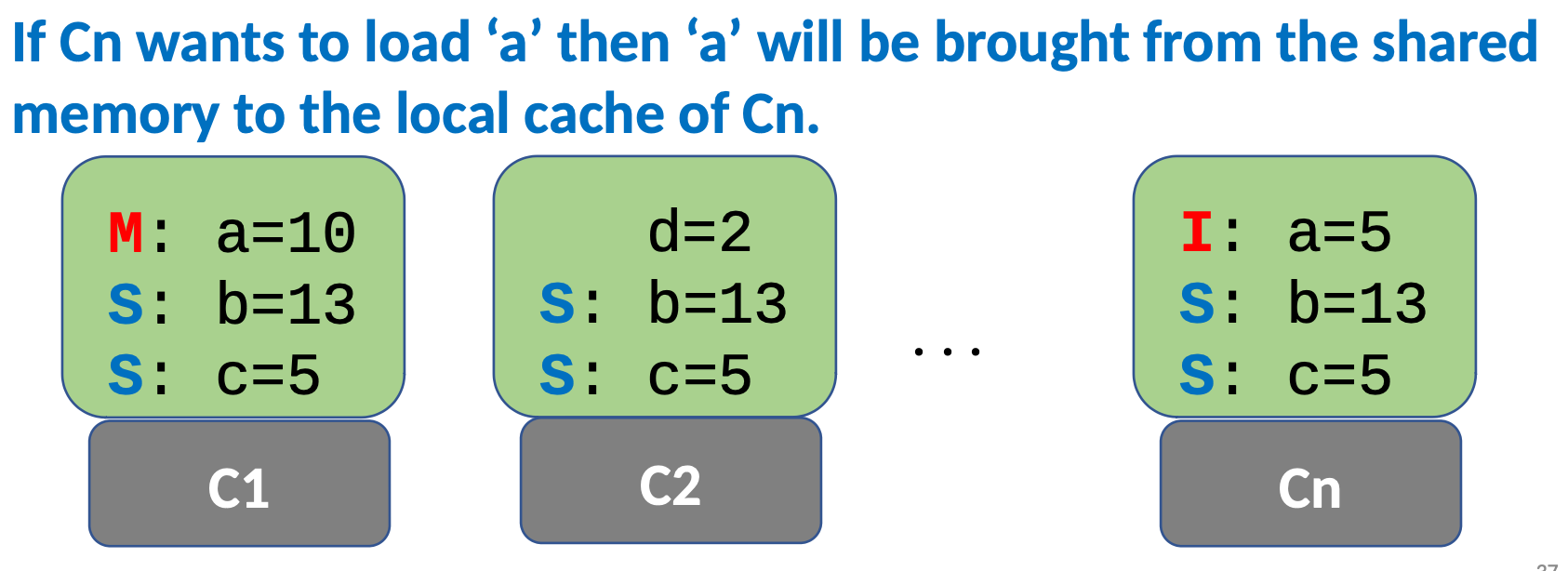
Coherence protocols: different cores must never see different values for the same shared data.
MSI protocol
each cache line is labeled with a state.
M: been modified
S: this data is sharing
I: invalid






multicore programming
Option 1: 程序直接以处理器内核为目标变成,太痛苦
Option 2: 使用concurrency platform
- Pthreads and WinAPI threads
- OpenMP
Concurrent Programming
单线程服务器可能会导致阻塞
并发服务器不会有这种问题,其中一个服务器阻塞了,别的也可以正常运行
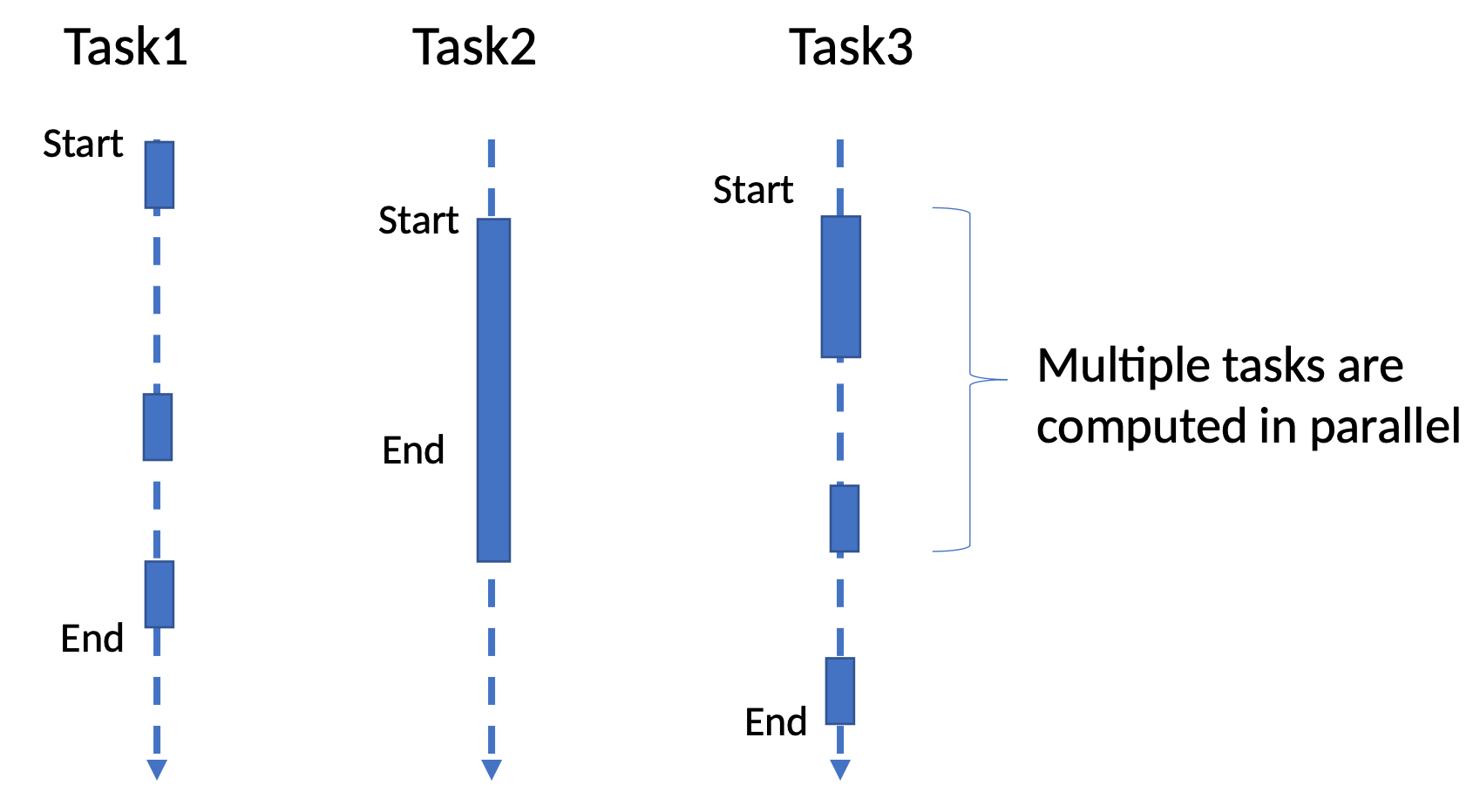
• Task2 is parallel to Task1 and Task3
• Parallel(同时) tasks are always concurrent.
• Concurrent tasks may not be parallel (Task1 and Task3)
• So, ‘concurrency’ is a more general term
• 任务2与任务1和任务3并行
• 并行任务总是同时进行的。
• 同时进行的任务可能不是并行的(任务1和任务3)
• 因此,“并发性”是一个更一般化的术语
使用Threads实现Concurrency
什么是Thread?
A thread of execution is the smallest sequence of programmed instructions that can be managed independently by a scheduler, which is typically a part of the operating system.
对于线程来说,栈数据是自己的,而heap, global data和其他资源例如打开的文件,sockets是共享的。
在C中想多线程编程就要用pthread.h。在链接的时候,要加上-lpthread
想要创建线程,就要用pthread_create()
int pthread_create( pthread_t *thread_id, // ID number for thread
const pthread_attr_t *attr, // controls thread attributes
void *(*function)(void *), // function to be executed
void *arg // argument of function);成功的话会返回0.不成功返回非0.由于我们使用系统默认的属性,所以attr通常设为NULL.
看到arg是一个指针,只能传入一个参数,所以当我们想要运行一个多参数的函数的时候,我们需要以结构体的形式传入。
e.g.
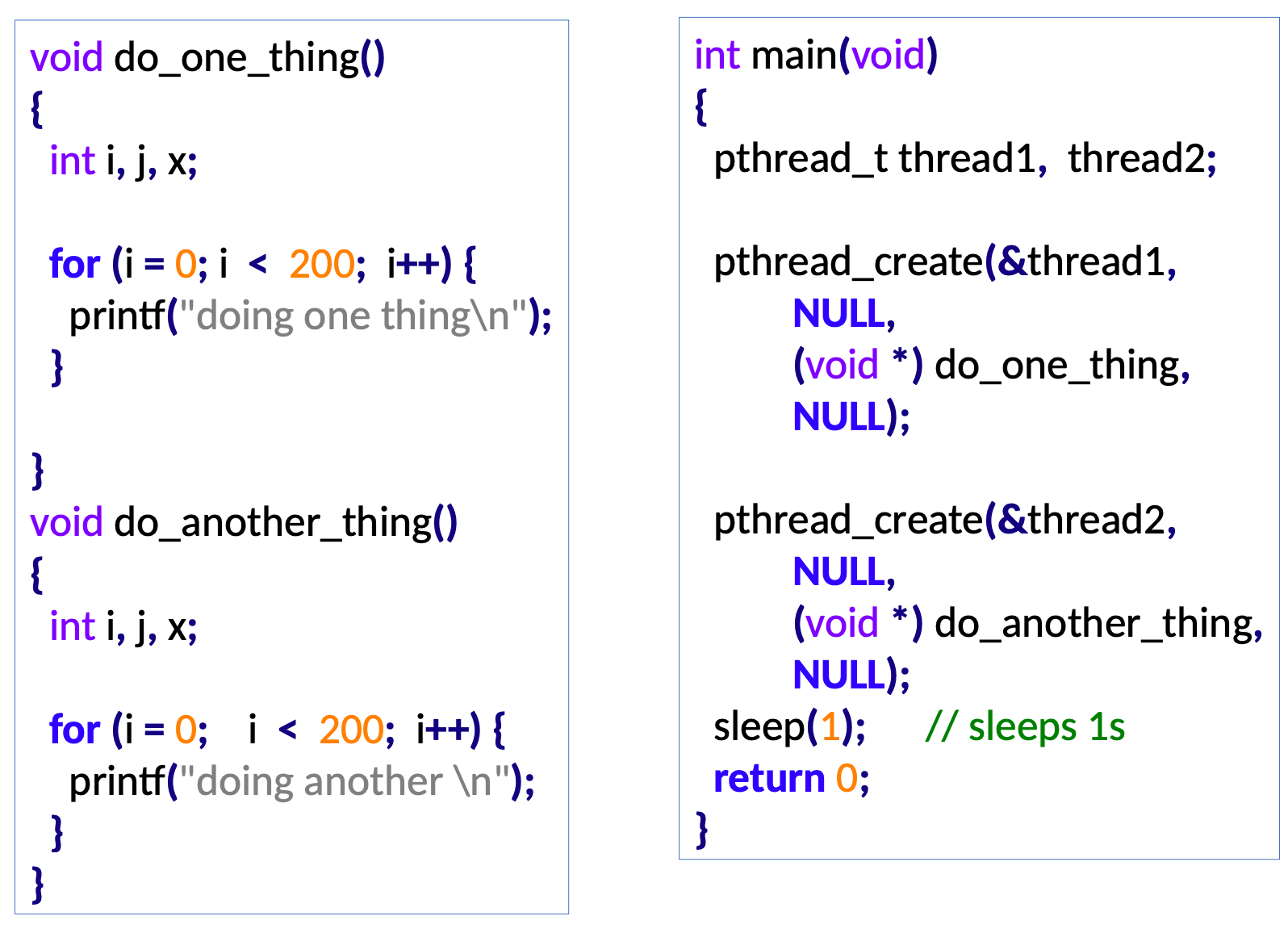
main线程不会自动等待线程1,2的结束再结束,所以如果不加sleep(1),那么就打印不出来东西,因为main进程结束了,整个就结束了。为了解决这个问题,我们就需要介绍pthreads的Synchronization Mechanism
pthreads提供三种Synchronization Mechanisms:
- Joins
- Mutual exclusions
- Condition varibales
pthread_join()
int pthread_join( pthread_t thread_id, // ID of thread to "join"
void **value_pntr // address of function’s return value);一般会把**value_pntr设置为NULL. join是阻塞函数,会阻塞线程。
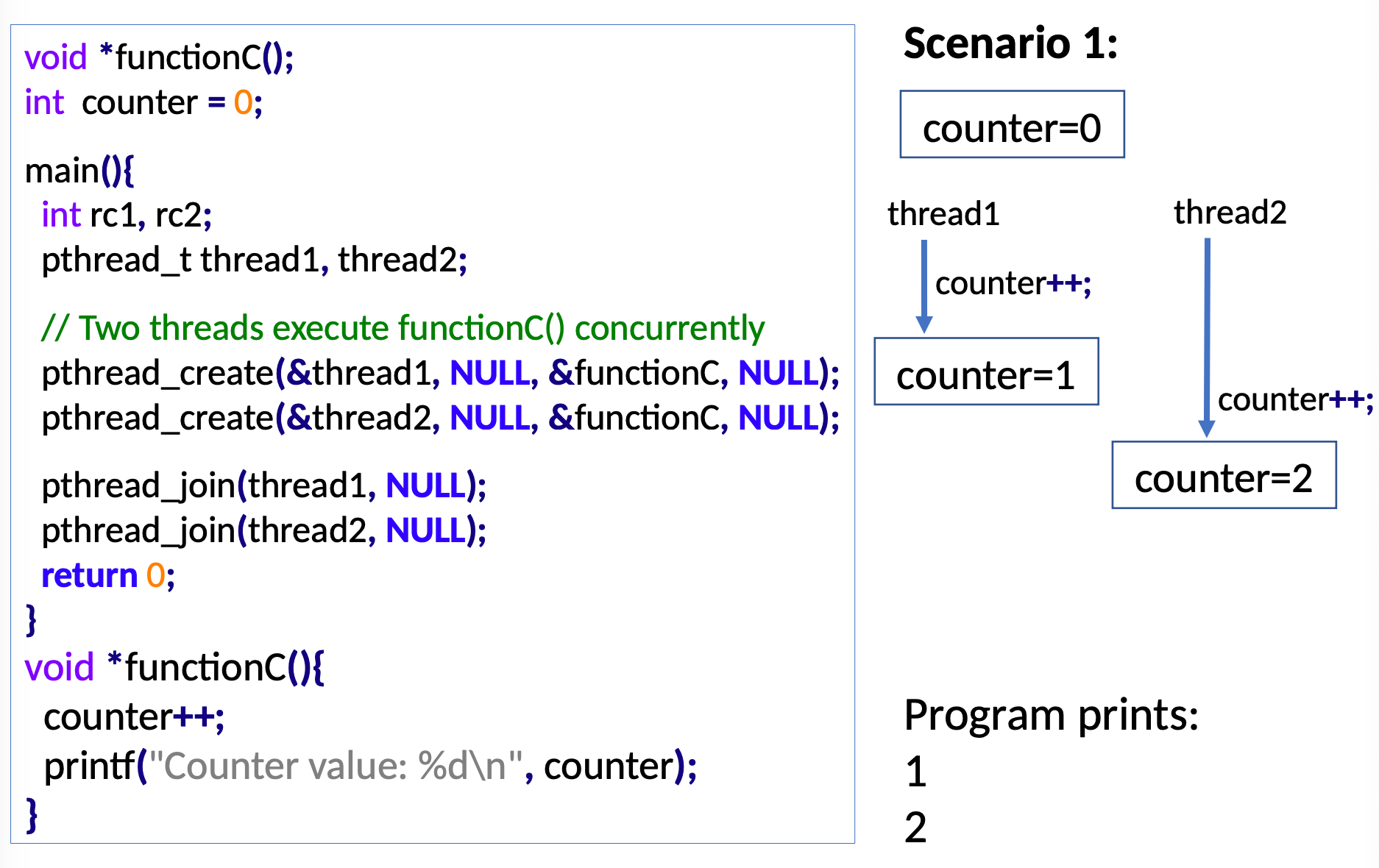
这个join有一些问题,因为如果多个线程都尝试读写shared varibale的时候,会产生race condition:
Mutex lock
为了解决Race condition, 我们就需要互斥锁,mutex lock provides mutual exclusion to shared resources.
语法
pthread_mutex_t mutex1 = PTHREAD_MUTEX_INITIALIZER;
...
pthread_mutex_lock( &mutex1 );
counter++;
pthread_mutex_unlock( &mutex1 );
...被锁起来的区域叫Critical region,里面是access serially。
但如果多个进程锁的顺序不对,就可能导致死锁。
还有一个函数叫pthread_mutex_trylock,一般的lock在无法锁定后就阻塞了,但对于trylock,无法锁定就会返回一个非0,不死等。
...
pthread_mutex_lock(&mutex1);
// Now test if already locked
while ( pthread_mutex_trylock(&mutex2) ){
// unlock resource to avoid deadlock
pthread_mutex_unlock(&mutex1);
...
// wait here for some time
...
pthread_mutex_lock(&mutex1);
}
count++;
pthread_mutex_unlock(&mutex1);
pthread_mutex_unlock(&mutex2);
...- Thread tries to acquire mutex2
- and if it fails, then it releases mutex1 to avoid deadlock
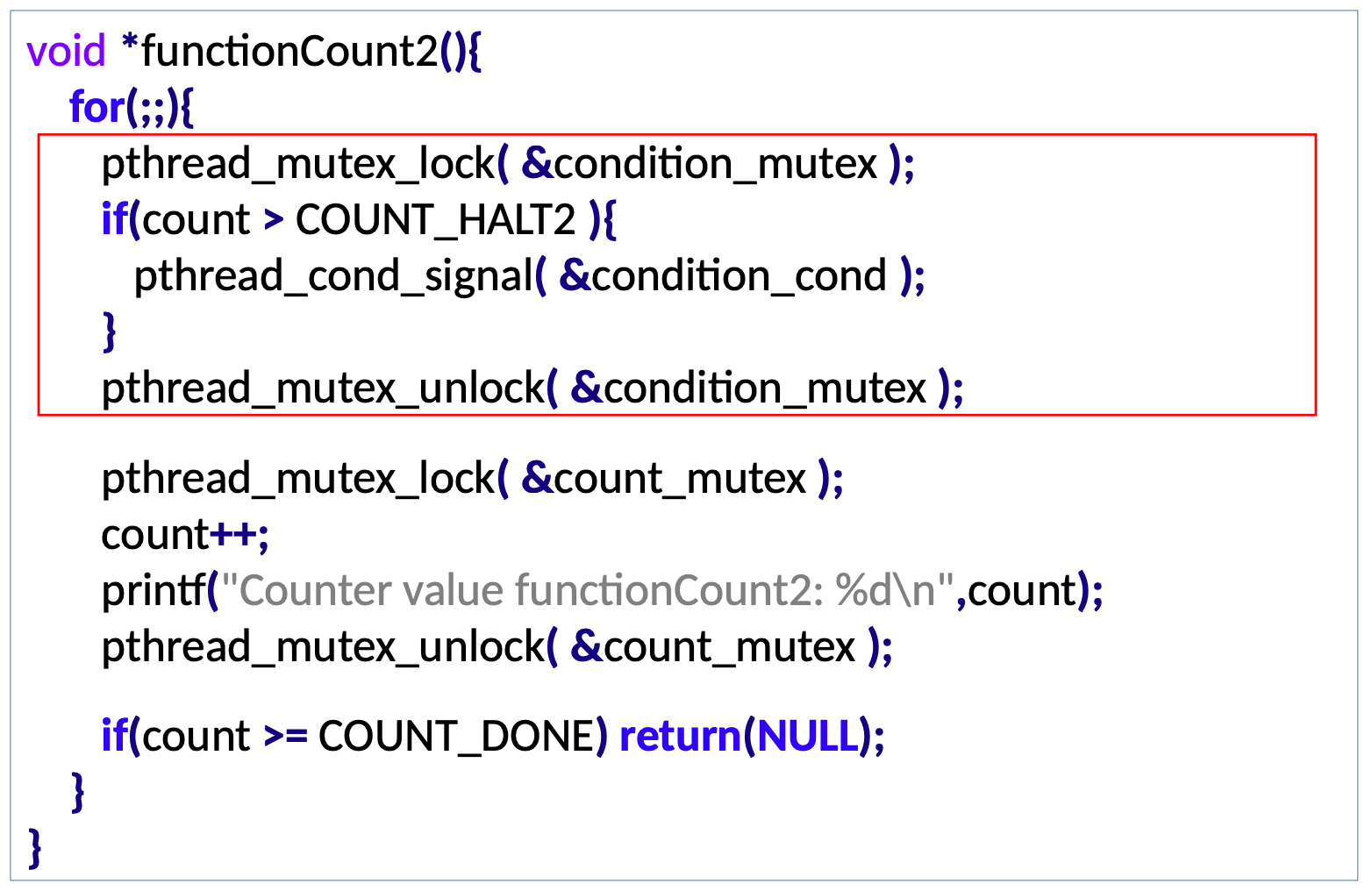
Condition variables
不是常用的wait 和 signal(P V)原语,而是条件变量。信号量是Semaphore, 条件变量是condition variable,pthread_cond_wait时,它会自动释放与条件变量相关联的互斥锁,并阻塞等待条件变量被触发。在这个过程中,条件变量不关心其等待队列中有多少线程。pthread_cond_signal时,它会唤醒在条件变量上等待的至少一个线程。如果使用pthread_cond_broadcast,则会唤醒在该条件变量上等待的所有线程。
语法:
pthread_cond_t condition_cond = PTHREAD_COND_INITIALIZER;
pthread_cond_wait( &condition_cond, &condition_mutex );
//The condition variable and a mutex variable associated with the condition variable
//wait本身会阻塞程序,为了避免死锁,会释放mutex锁,在收到signal后,会再拿回mutex锁。
pthread_cond_signal( &condition_cond );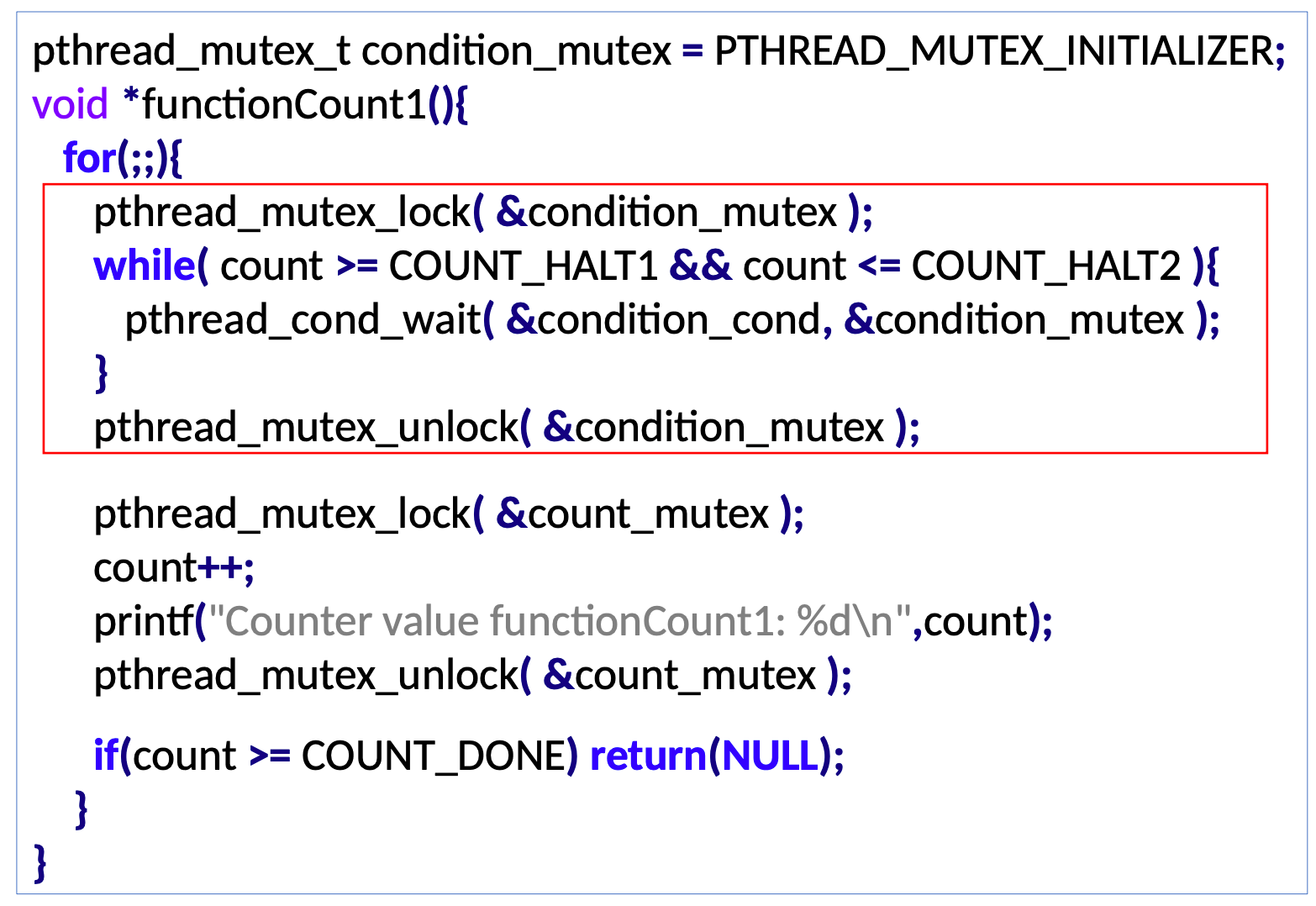
条件变量的状态机图:
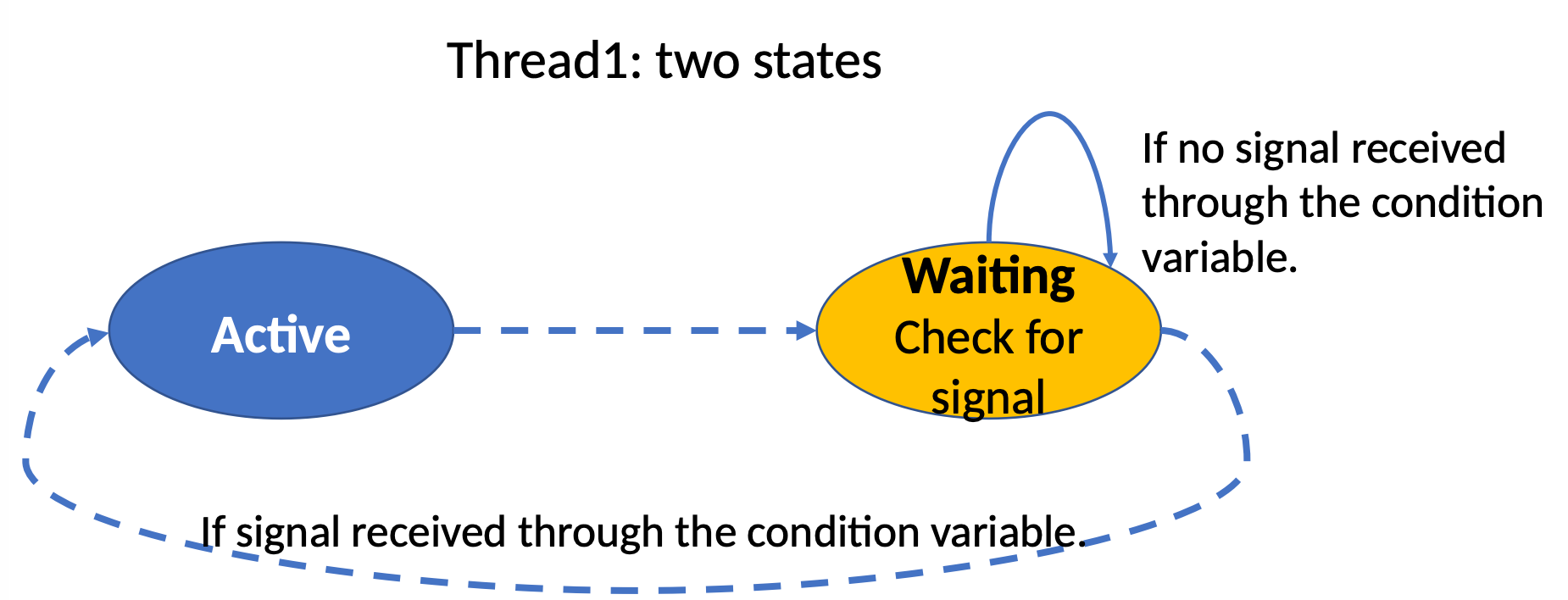
为什么条件变量需要搭配互斥锁使用? 因为仅在waiting的情况下,才会检查是否有signal。如果在waiting之前signal就来了,那么thread就会错过,进入无限等待。这个互斥锁是用来序列化操作条件变量的过程的,从而防止上面无限等待的情况发生,
并发编程应用:并发链表
链表要有以下原语:
- Insert:插入新node,保证sorted order
- Delete:删除一个存在的node
- Member:如果node存在,返回true,反之false
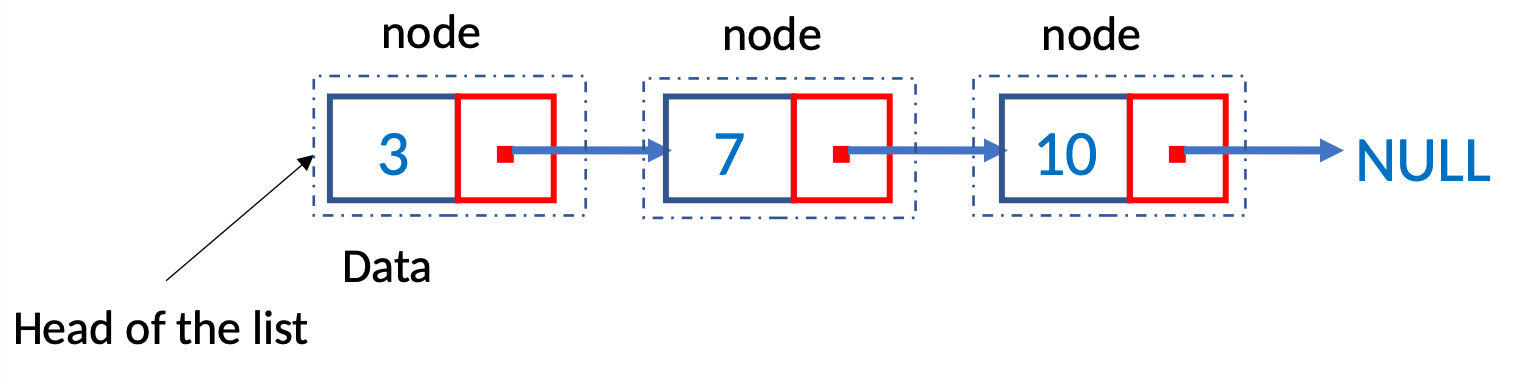
这个链表的并发性很差,体现在,读的情况下,可以并发,但写的时候,无法并发。因为难以保证顺序。
解决方法
只有一个线程可以访问list
问题:确实解决了问题,但是由于大多数操作为读,这样写代码会让并发性变得很烂。
对每个节点上锁
问题:每个节点都要有一个锁,存储消耗大,且代码写起来太痛苦。
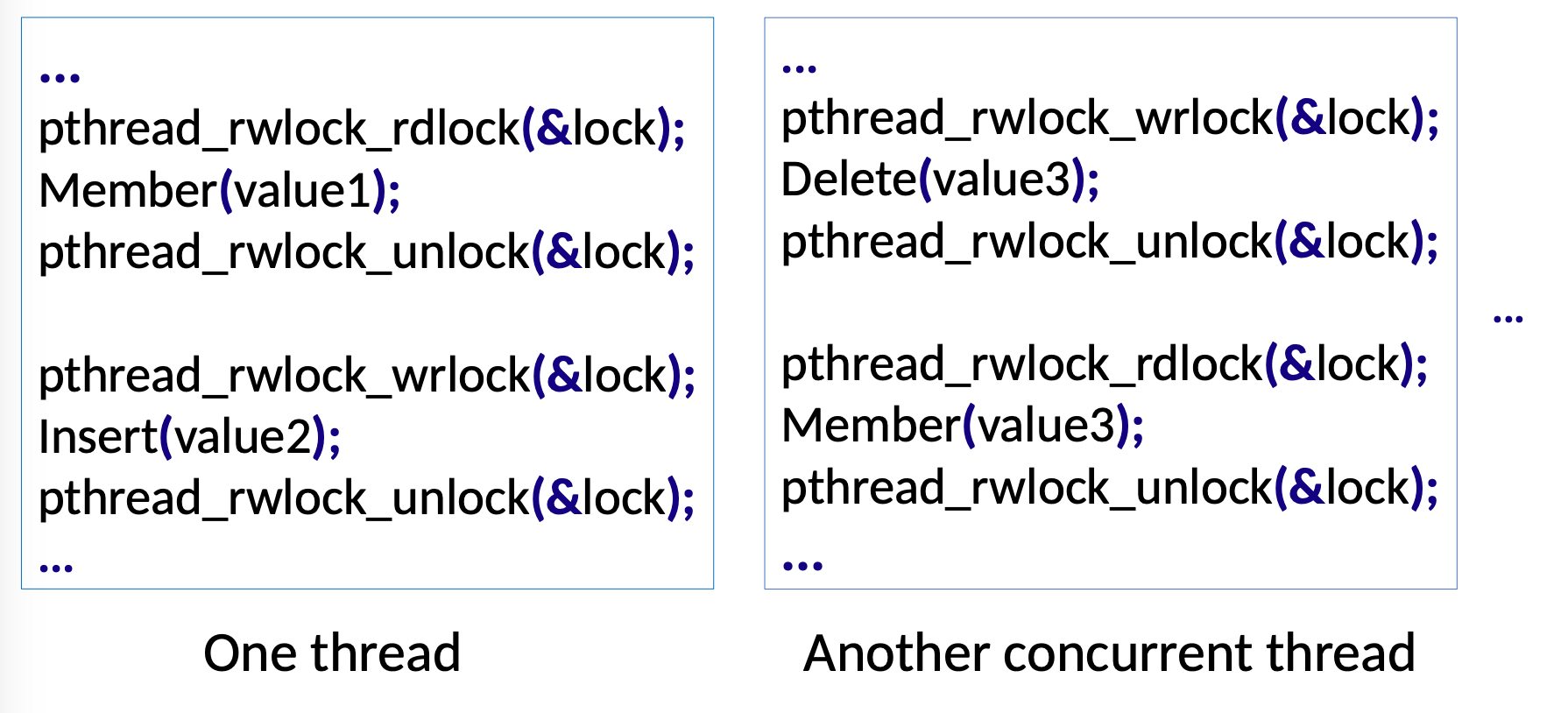
好方法:使用Read-write locks
读写分开,分别上锁,allow multiple threads to read, but allow only one thread to write.
cpthread_rwlock_t lock = PTHREAD_RWLOCK_INITIALIZER; //for just reading pthread_rwlock_rdlock(&lock); //for read-write access pthread_rwlock_wrlock(&lock); //only one unlock function pthread_rwlock_unlock(&lock);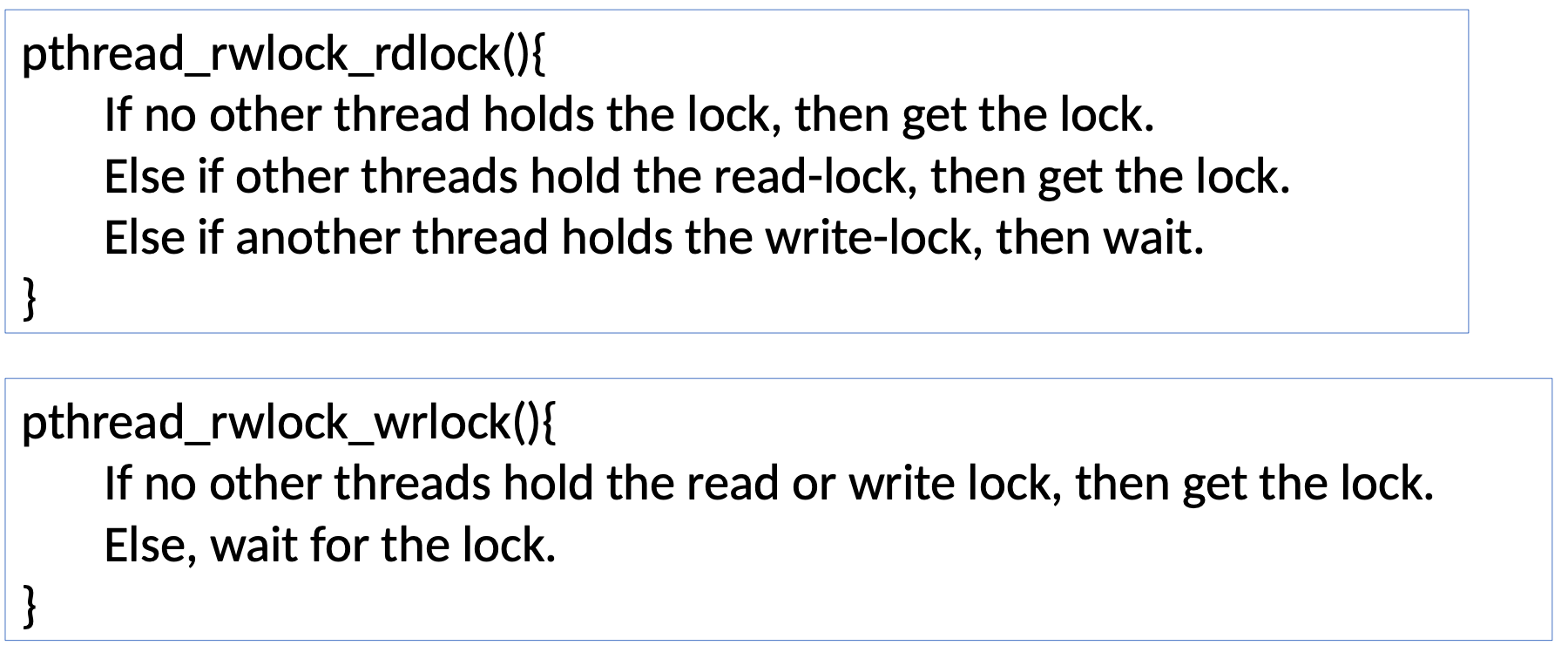
Sockets
C-S架构
- 有服务器进程,等待客户端请求并处理它们。
- 多个客户端可以链接并要求服务
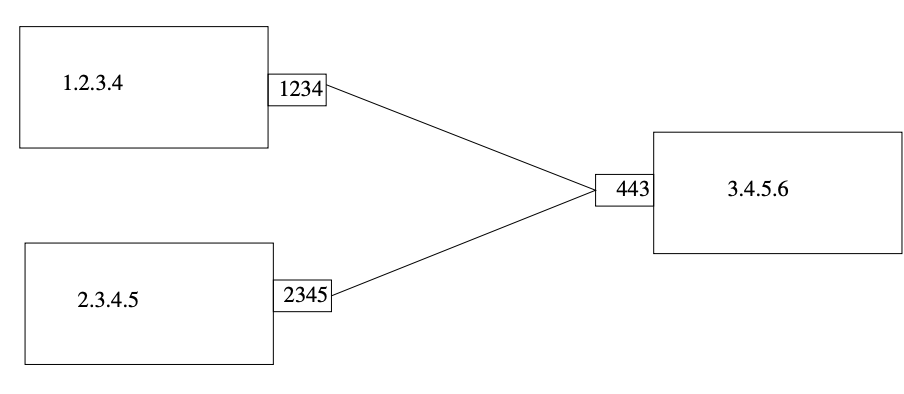
- socket格式为:ip ports
底层逻辑
服务器端:
Sockets是cs链接的端点。
- Server通过
socket系统调用创建端点。这个玩意返回一个套接字描述符 - Server指定要监听的端口和协议(TCP UDP),并将信息保存在sockaddr_in6结构体中。这里用了ipv6,如果想用ipv4的话,就是sockaddr_in结构体
- 通过bind系统调用,Server将socketaddr_in6结构体中的信息(端口,协议)分配给socket。这一步周是为了将socket和端口关联起来。
- 通过accept系统调用,server在端口上监听服务器链接请求。
- 一旦连接建立,服务器可以用read系统调用来读信息,通过write系统调用写信息。
- 结束后,server通过close系统调用关闭连接。
客户端端:
- 客户端用socket系统调用创建端点
- 客户端用connect系统调用链接服务器(端口号自动分配)
- 用write系统调用写信息,用read系统调用读信息
- close系统调用关闭连接。
并发性
良好处理并发对于实现socket程序至关重要
关键点:服务器程序可以为每个传入连接创建单独的线程,任意数量的线程共享内存且可能同时运行
可能导致需要同步的竞争条件
使用适当的互斥。
Practice Questions

To make it possible to execute several parts of program concurrently.

Global variables, Data in heap and Open files

The code which is included in the mutex_lock and mutex_unlock, which is executed serializely. switching between threads must be limited to ensure correct execution of the program.

Other thread may wait and do noting while one thread is working in critical section. We must to keep waiting time(critical part) as small as possible.

The dead wait will happen, which means other threads will wait for the thread which is being blocked, and the thread being blocked cannot be freed forever. the process dead.

#include <stdio.h>
#include <stdlib.h>
int totalCalls = 0;
char *fun1 () {
static int isExecuted = 0;
char *result;
isExecuted++;
---
totalCalls++;
---
result = malloc(5);
return result;
}
char *fun2 () {
static int isExecuted = 0;
char *result;
isExecuted++;
---
totalCalls++;
---
result = malloc(10);
return result;
}如图

用读写锁没有意义,因为totalcalls被修改了。没有读的需求。

#include <stdio.h>
#include <stdlib.h>
char *msg = "This is a message";
void fun1 () {
if (msg != NULL) {
msg = NULL;
}
}
char *fun2 () {
char *result;
if (msg == NULL || (strlen(msg) > 5)) {
return NULL;
}
result = malloc(6);
strcpy(result, msg);
return result;
}
c#include <stdio.h> #include <stdlib.h> #include <string.h> #include <pthread.h> char *msg = "This is a message"; pthread_rwlock_t lock = PTHREAD_RWLOCK_INITIALIZER; void fun1() { pthread_rwlock_wrlock(&lock); if (msg != NULL) { msg = NULL; } pthread_rwlock_unlock(&lock); } char *fun2() { char *result = NULL; pthread_rwlock_rdlock(&lock); if (msg != NULL && strlen(msg) <= 5) { result = malloc(6); if (result != NULL) { strcpy(result, msg); } } pthread_rwlock_unlock(&lock); return result; }\
 Larry Shi
Larry Shi