Week 10 Reinforcement Learning
什么是强化学习
一种ML类型,Agent通过与环境做出交互,试探动作来获得奖励/惩罚。目标是学习一种策略,以最大化累计奖励。
在需要训练代理根据复杂、不确定或动态环境做出决策的情况下特别有用。
- 自动驾驶:复杂的交通情况,天气,道路障碍
- 股市:地缘政治,经济动荡
- 医疗诊断
在RL中,agent自动从没有标签的数据中学习,agent从自己的经验中学习。 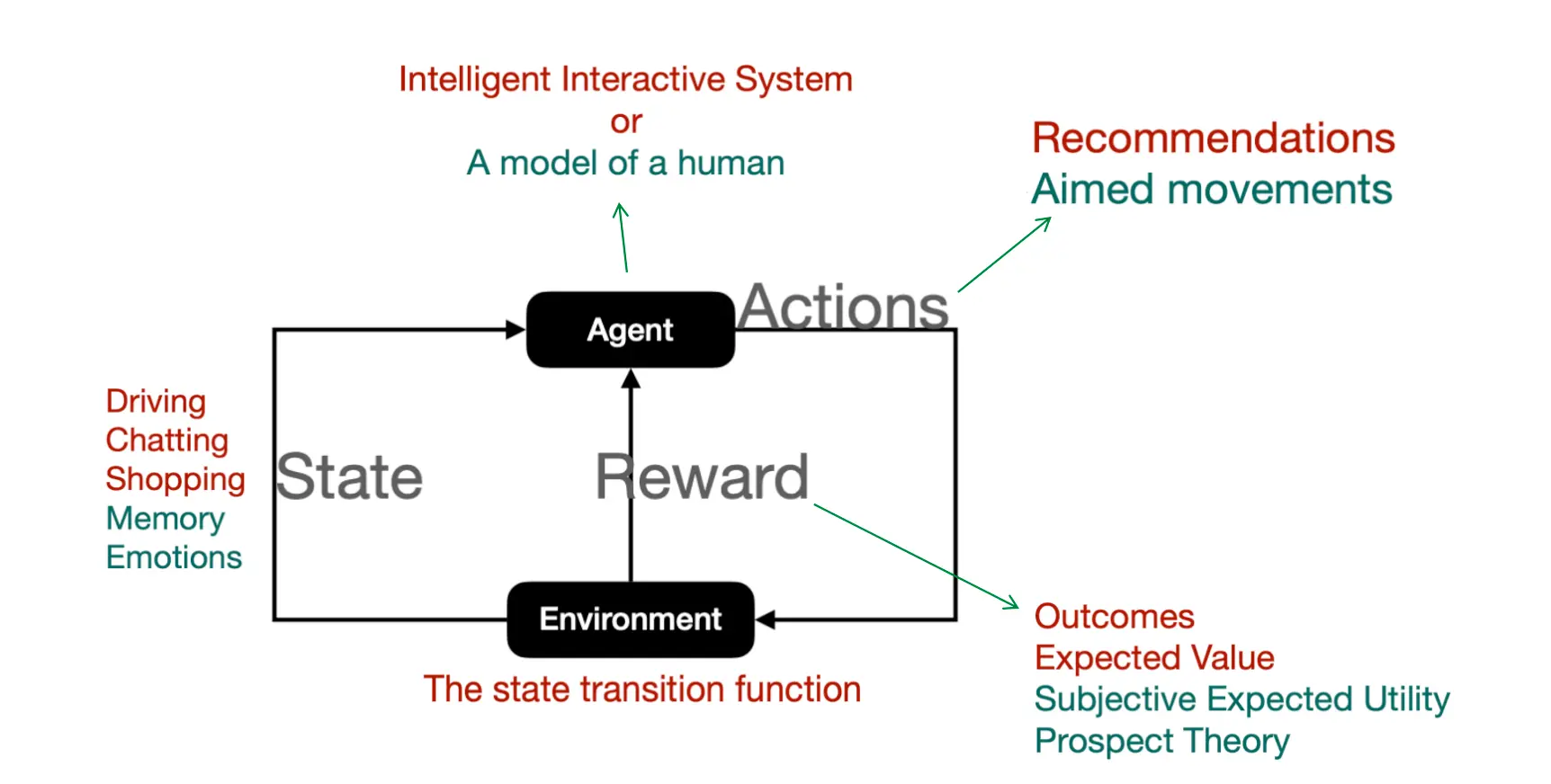
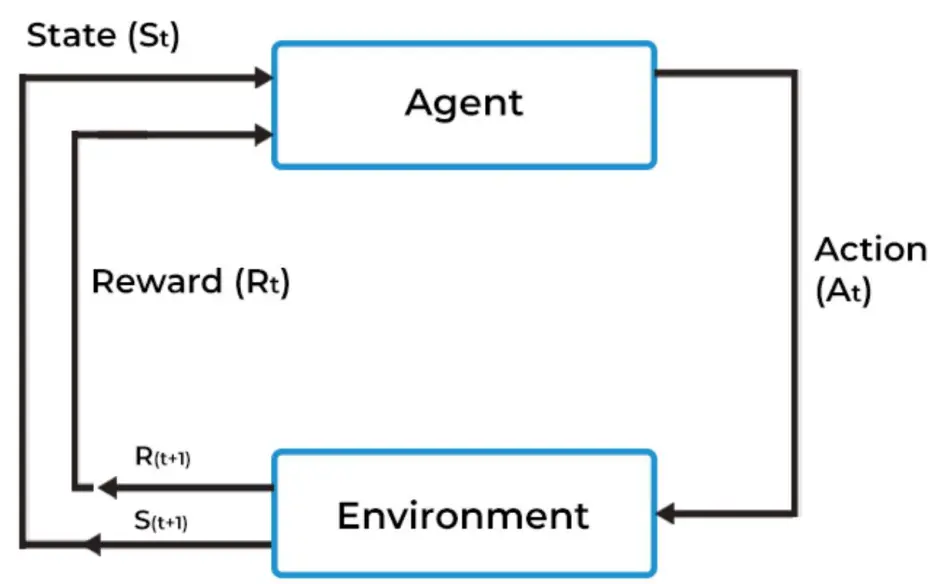 Agent是ML algorithm,或者自动系统,环境是指有属性(例如变量、边界值、规则和有效操作)的适应性问题空间。
Agent是ML algorithm,或者自动系统,环境是指有属性(例如变量、边界值、规则和有效操作)的适应性问题空间。 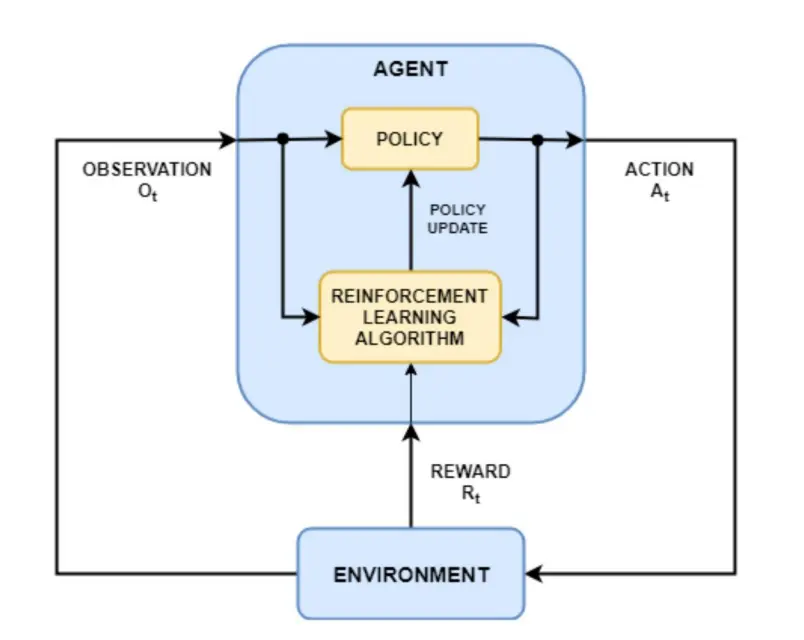 一些问题用到了RL:
一些问题用到了RL:
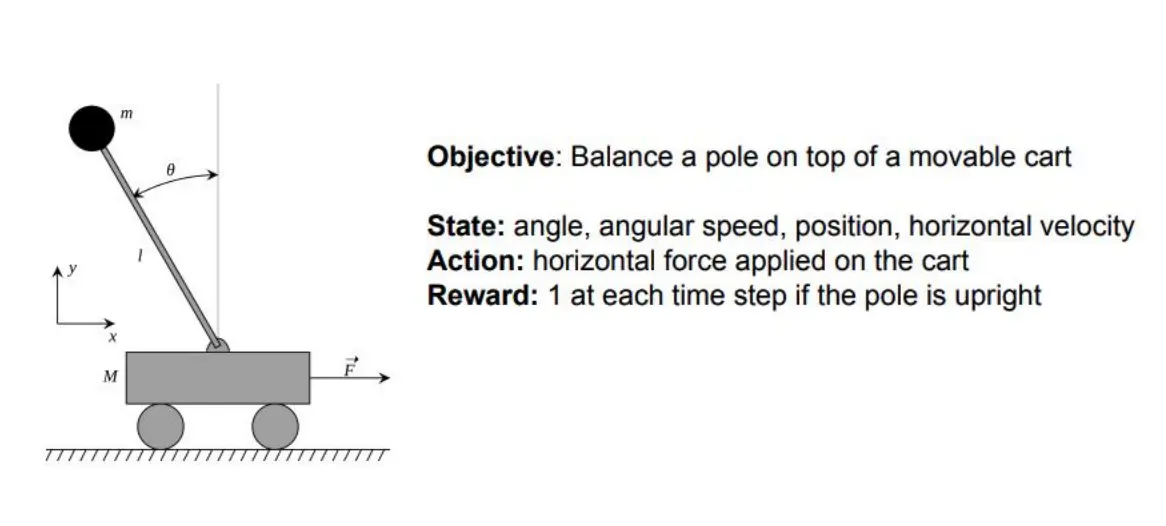
- Cart-Pole Problem
- 机器人运动
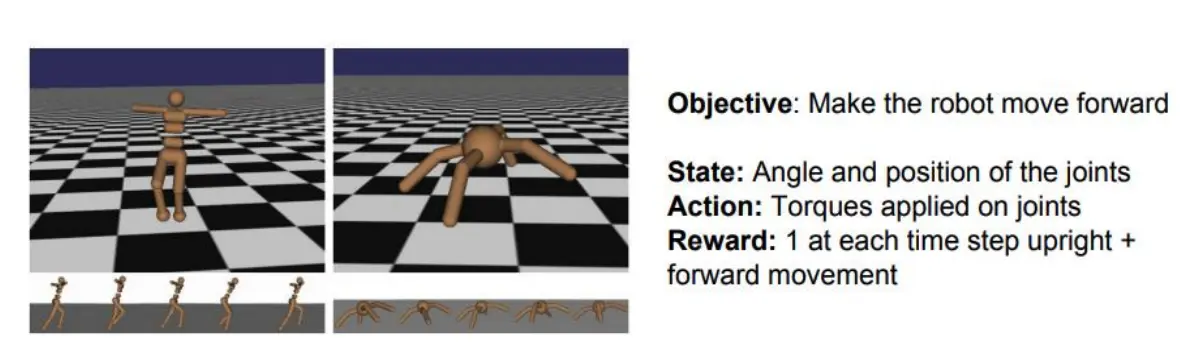
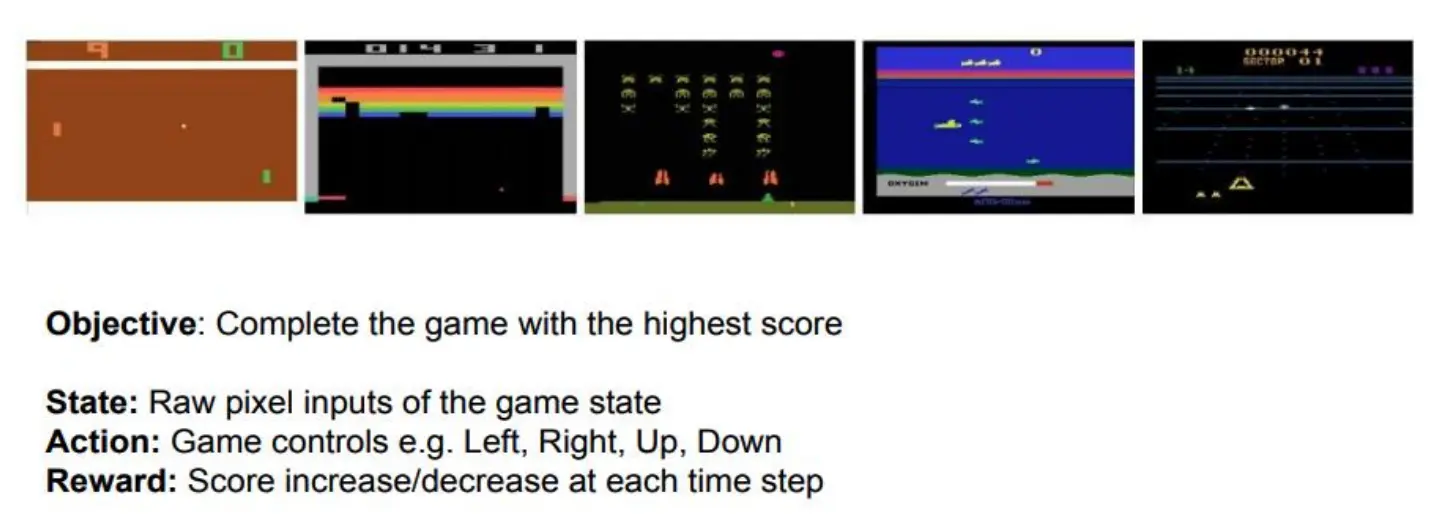
- Atari Games
MDP
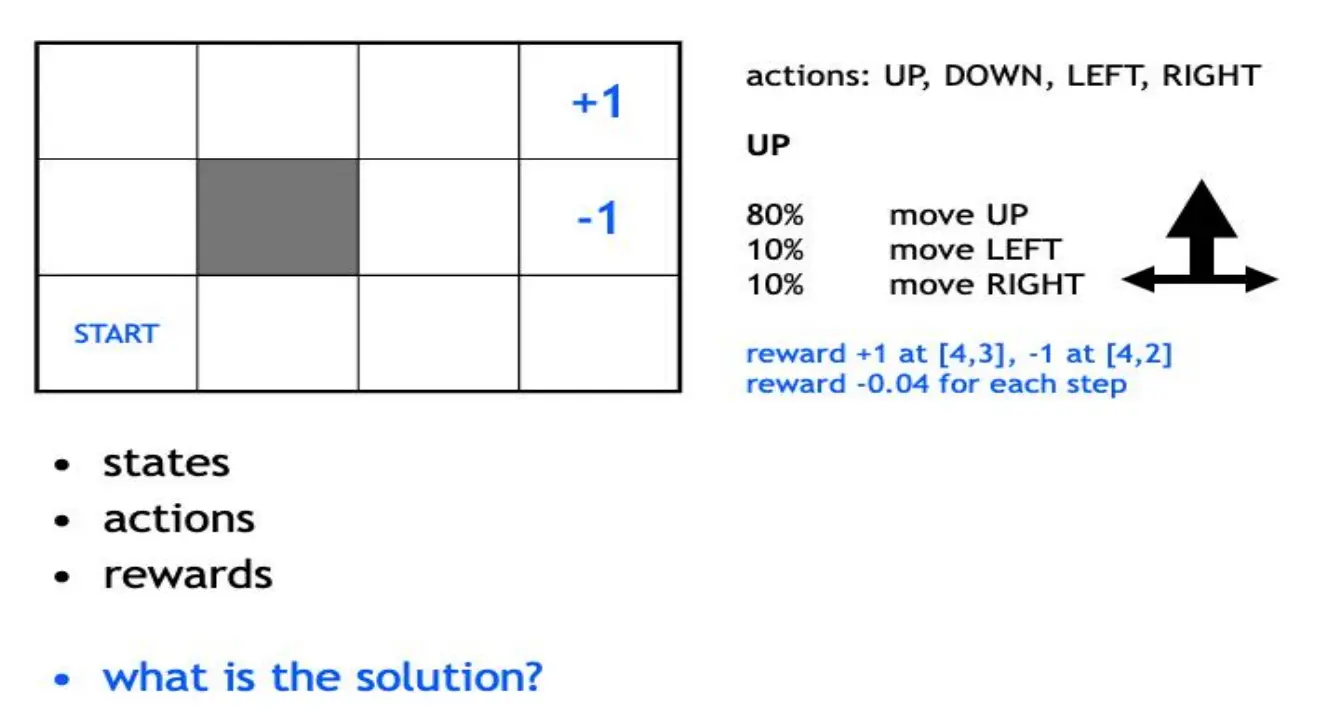 注意,每一步奖励是-0.04
注意,每一步奖励是-0.04
 这是否是最优解呢?不一定。 因为agent在80%的概率是朝着正确方向走的,还有20%的概率偏离。因此,上图策略在实际执行中可能因为偏移导致撞墙、或者错过终点,未必能最大化期望回报
这是否是最优解呢?不一定。 因为agent在80%的概率是朝着正确方向走的,还有20%的概率偏离。因此,上图策略在实际执行中可能因为偏移导致撞墙、或者错过终点,未必能最大化期望回报
本例真正的“解”是要找出最优策略𝜋∗,在随机转移和折扣回报下最大化
当每一步reward为-0.1的时候,策略为:  当为-2时,策略为:(宁愿踩上-1,也要快速到达+1)
当为-2时,策略为:(宁愿踩上-1,也要快速到达+1)  当为+0.01的时候,那就一直不到,远离最好:
当为+0.01的时候,那就一直不到,远离最好:  如何形式化建模一个RL问题?用MDP。
如何形式化建模一个RL问题?用MDP。 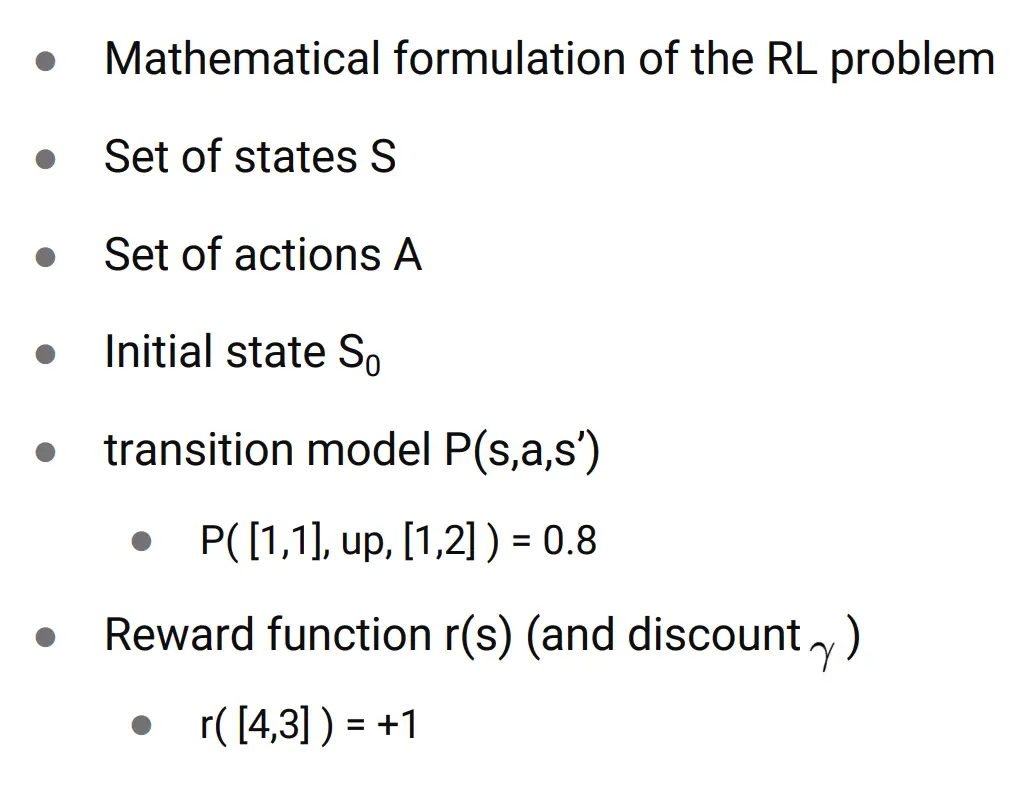 一个策略 π 是指指定在每个状态下要采取的操作的函数。 我们的目标是找到最优策略 π*,能够最大化累计折扣reward:
一个策略 π 是指指定在每个状态下要采取的操作的函数。 我们的目标是找到最优策略 π*,能够最大化累计折扣reward:
我们真正要解的是,如何在所有可能的策略中,选出那个能够最大化未来奖励之和的策略 π*。由于初始状态、状态转移具有随机性(transition probabilities),我们不能只看单次轨迹,而要最大化期望累积奖励。 所以形式化定义为:
即在所有策略中,选择使期望折扣累积奖励达到最大者。 我们定义Episode(回合)为:
- 从智能体处于某个初始状态(initial state)开始,按照策略不断选择动作、观察新状态并获得奖励,直到 达到某个终止条件。
折扣机制
强化学习中,我们关心的是随时间累积的回报,不同的计量方式有两种常见形式:
- Additive rewards(累加回报):
- Discounted rewards(折扣回报):
- 引入折扣因子,对未来的奖励打折扣。因子越小,越“偏好”即时奖励,因子越接近1,则更看重长期回报。
- 折扣机制能保证在无限回合下收敛,也可以刻画风险偏好和任务时长偏好。
Value Function 状态价值函数
估计从给定状态s开始,按照某个策略执行时,智能体能获得的期望累积未来奖励。
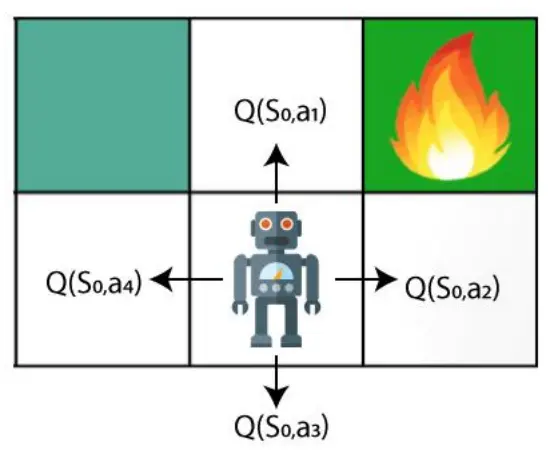
Q-Function 状态-动作价值函数
比Value Function多了一个这一步要采用的动作。用于估计在给定状态 s 下,执行某个动作 a,然后按照策略 π 继续进行时,智能体所期望获得的累积未来奖励。
明确考虑了在状态 s 下执行动作 a 的后果,因此能帮助智能体评估每个可能的动作。 状态价值函数可以看作是状态-动作价值函数 Q 对所有可能动作的期望。
Bellman Equation 贝尔曼方程
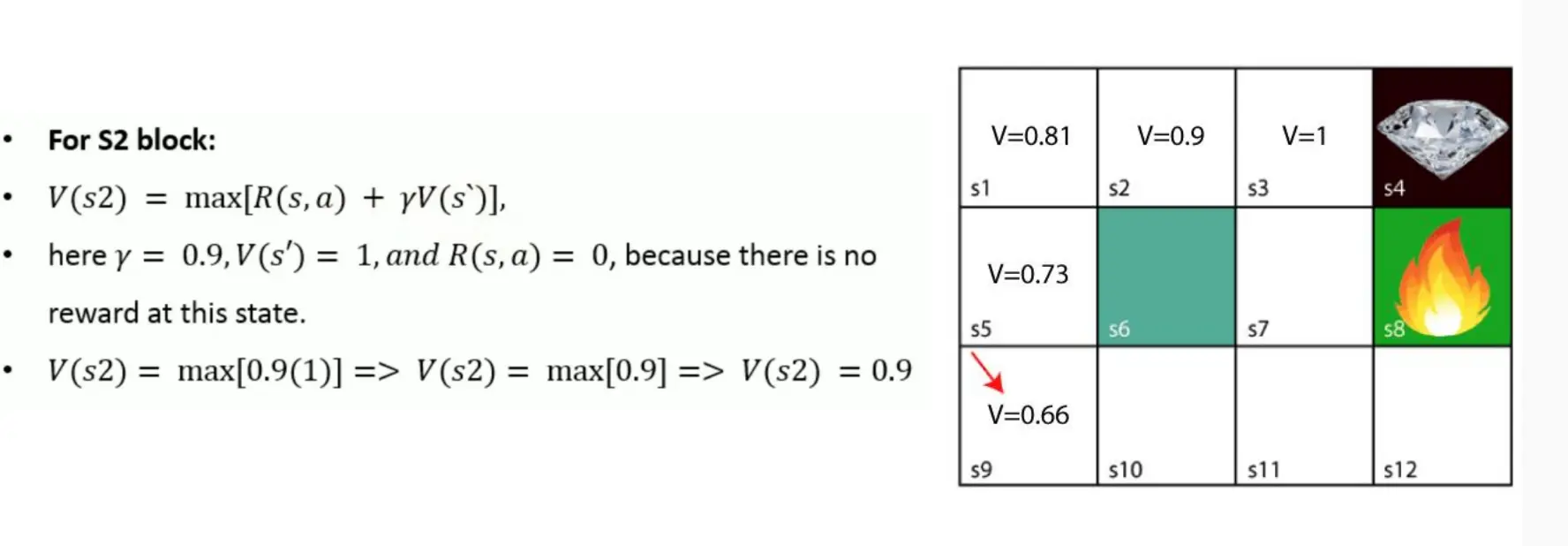
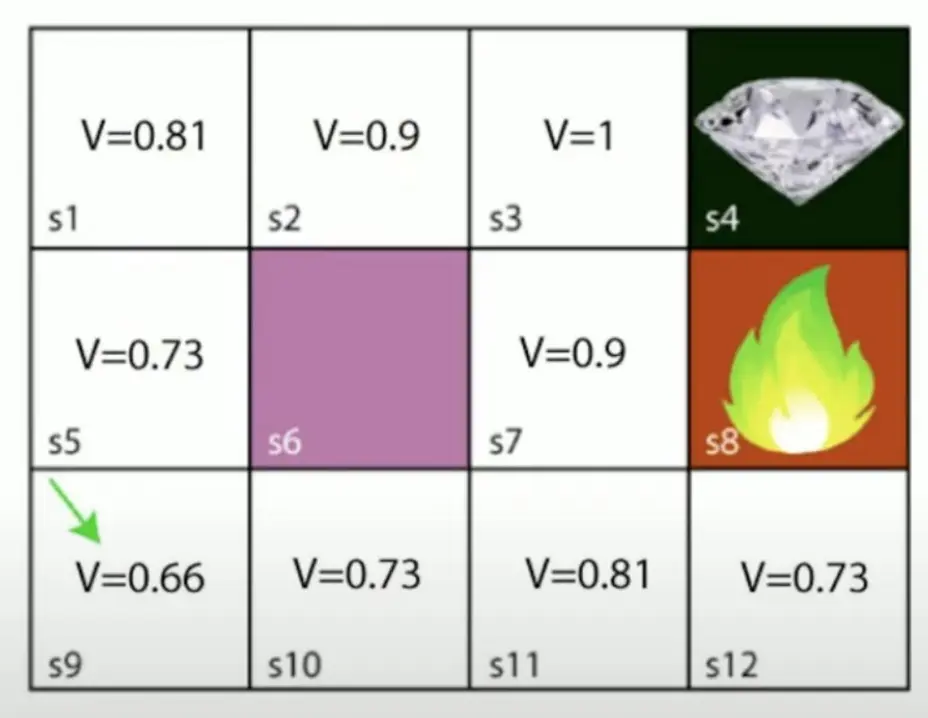
贝尔曼方程描述了如何递归地计算一个状态的价值V(s)。
例子: 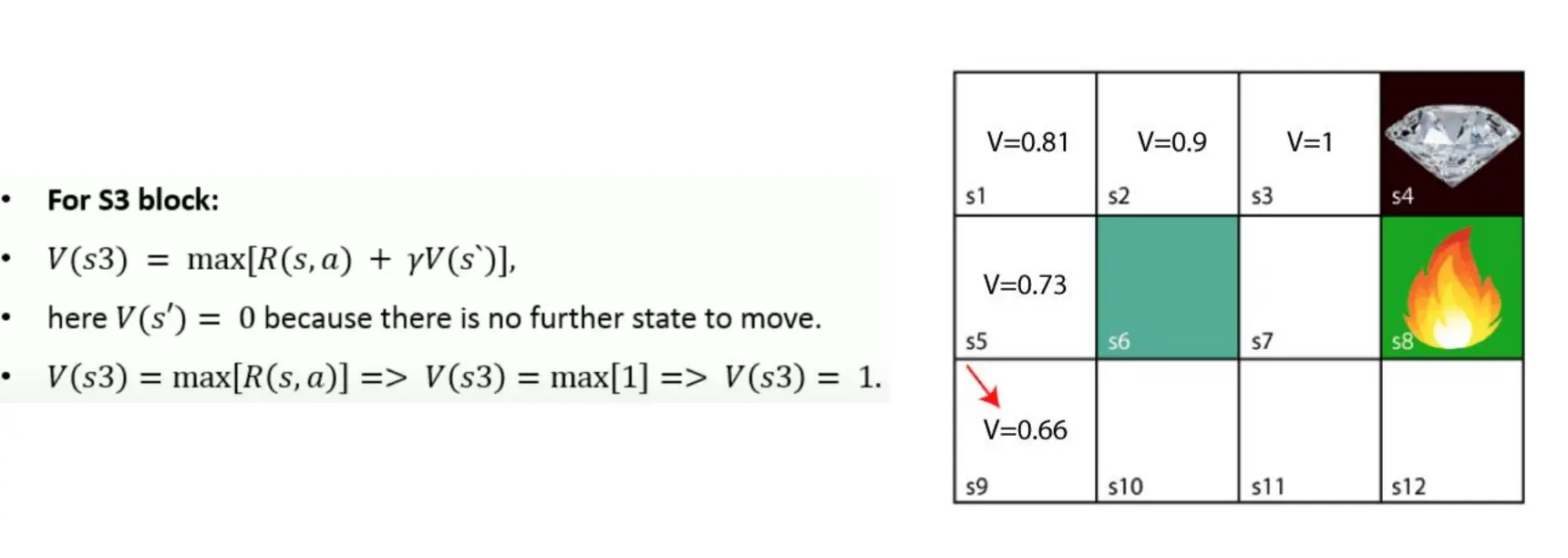
Q-Learning
 对于这个例子,代理将根据概率基础采取行动并进行更改。我们需要在Q值方面进行一些更改。
对于这个例子,代理将根据概率基础采取行动并进行更改。我们需要在Q值方面进行一些更改。
Q-learning是一种 无模型:这意味着它不需要知道环境的动态或转移概率。换句话说,Q-learning 不依赖于环境的具体转移模型(即状态如何根据动作转移,及这些转移的概率)。 基于价值:关注的是学习 状态-动作价值函数 Q(s,a), 离策略算法,更新 Q 值时,可以使用不同于当前策略的数据,通常使用的是探索策略(如 epsilon-greedy 策略)。 将根据代理的当前状态找到最佳的一系列动作。 “Q”代表质量。质量表示动作在最大化未来奖励方面的价值。
Q-table 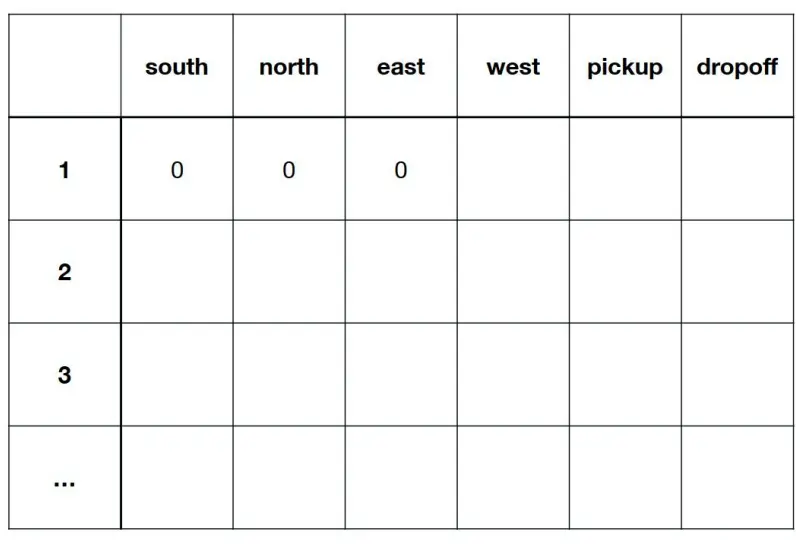 Q-learning Open: Pasted image 20250429141831.png
Q-learning Open: Pasted image 20250429141831.png
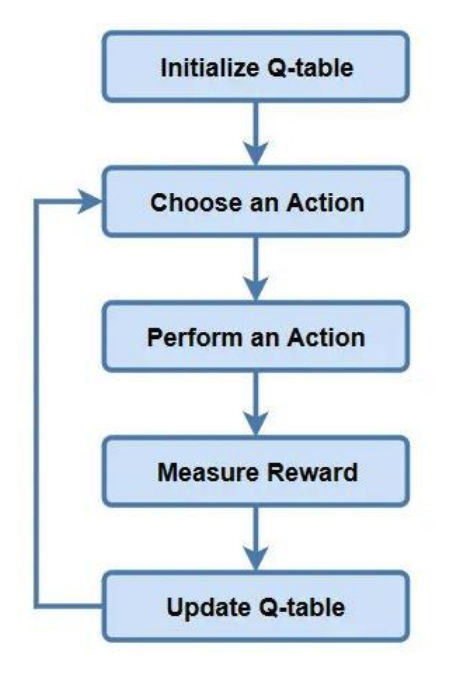
- 初始化 Q 表:对于每个状态s和动作a,初始化 Q 值Q(s,a)为0
- 观察当前状态s
- 选择一个动作:在当前状态s下,智能体选择一个动作a并执行,选择的方式通常是 探索或 利用,例如通过 epsilon-greedy 策略选择。
- 接收即时奖励r,执行动作后,智能体会从环境中得到即时奖励r,这个奖励可以是正值或负值,表示该动作在当前状态下的效果。
- 观察新的状态s',
- 更新 Q 值:通过贝尔曼方程来更新 Q 表
- 更新状态s <- s'
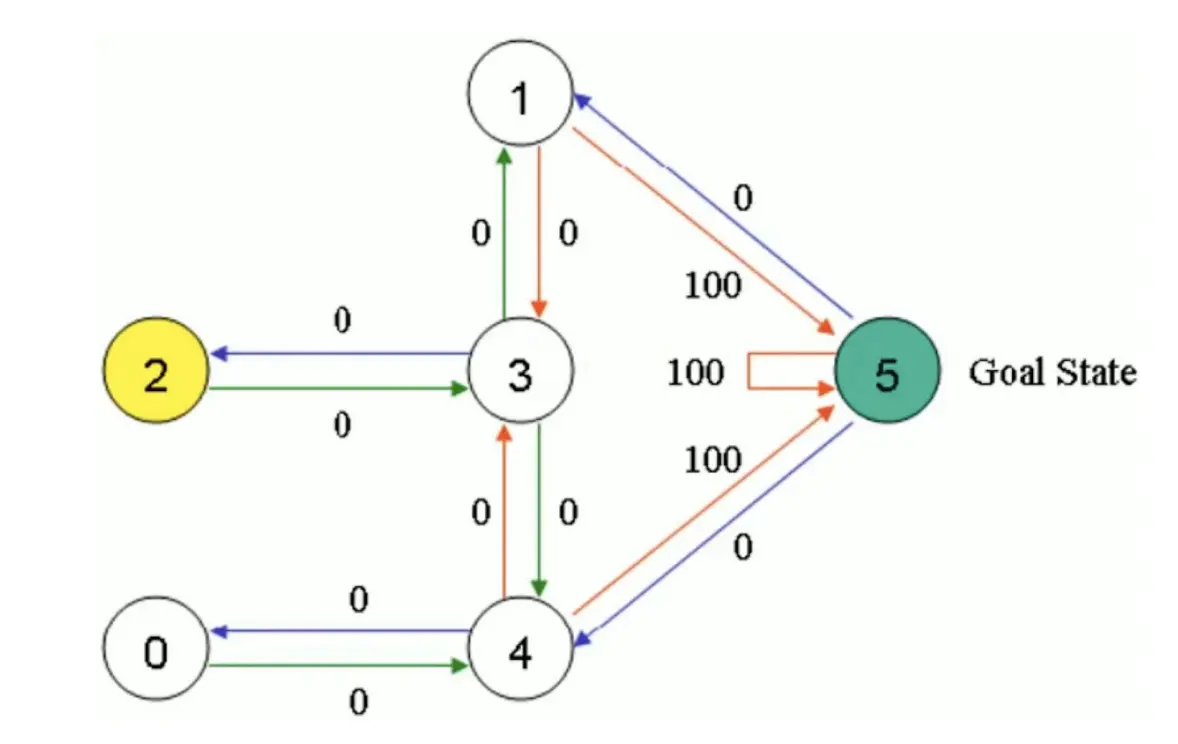
例子: 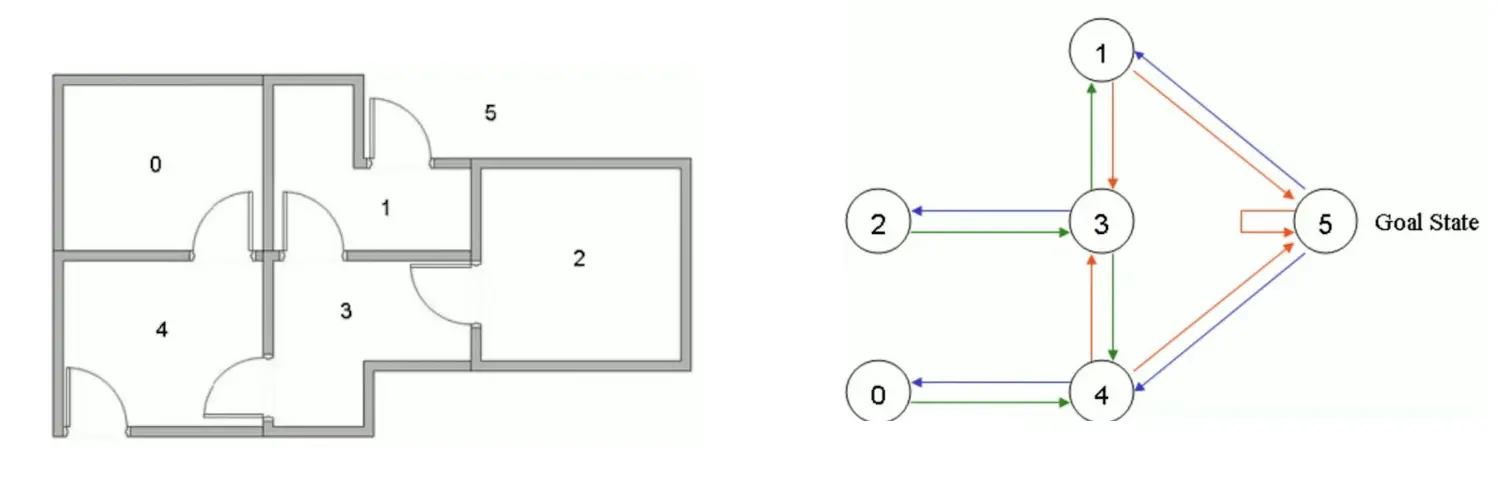 我们定义一下Reward:
我们定义一下Reward:
 首先,初始化Action表和Q表:
首先,初始化Action表和Q表: 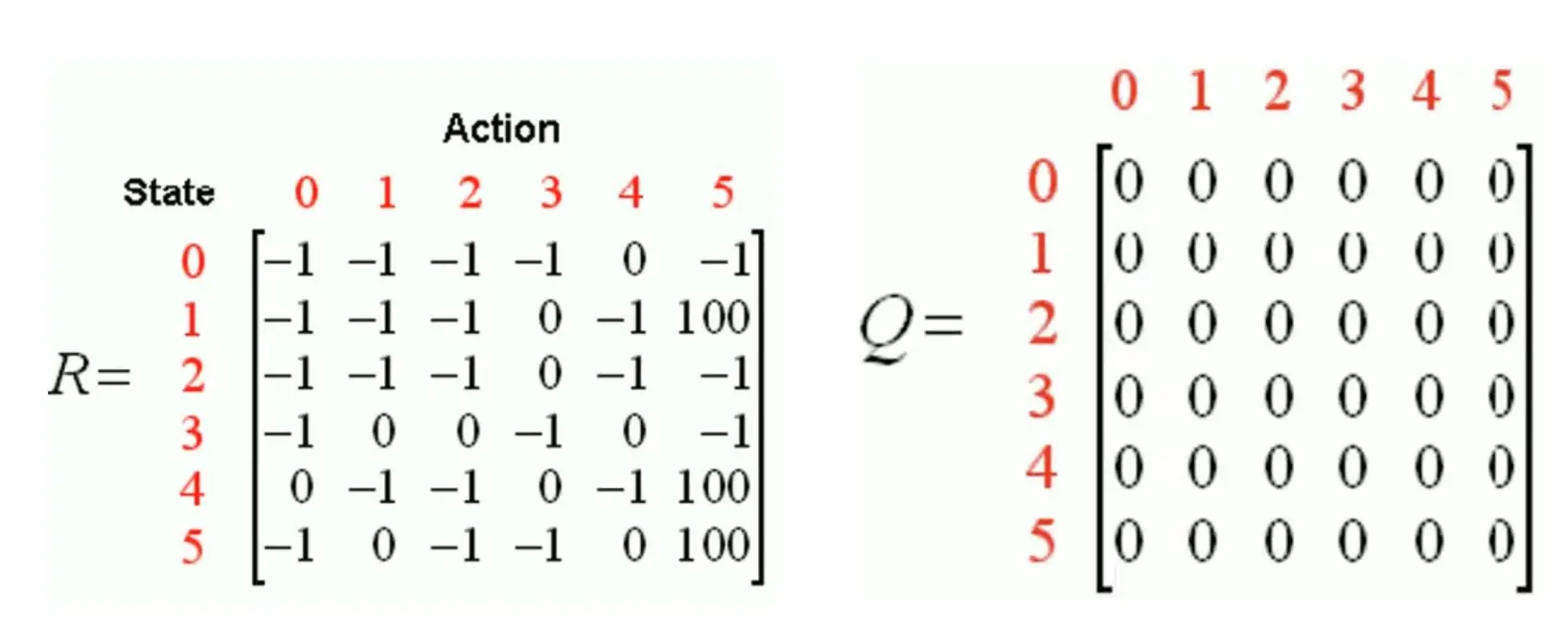 我们把状态1当做起始状态。要么去3,要么去5,显然去5,所以选择去5。那么我们想要更新Q表。5能到1,5,4 Q(1,5) = Reward(1,5) + 0.8max[Q(5,1), Q(5,5), Q(5,4)] = 100 + 0.8 *0 = 100 所以更新:
我们把状态1当做起始状态。要么去3,要么去5,显然去5,所以选择去5。那么我们想要更新Q表。5能到1,5,4 Q(1,5) = Reward(1,5) + 0.8max[Q(5,1), Q(5,5), Q(5,4)] = 100 + 0.8 *0 = 100 所以更新: 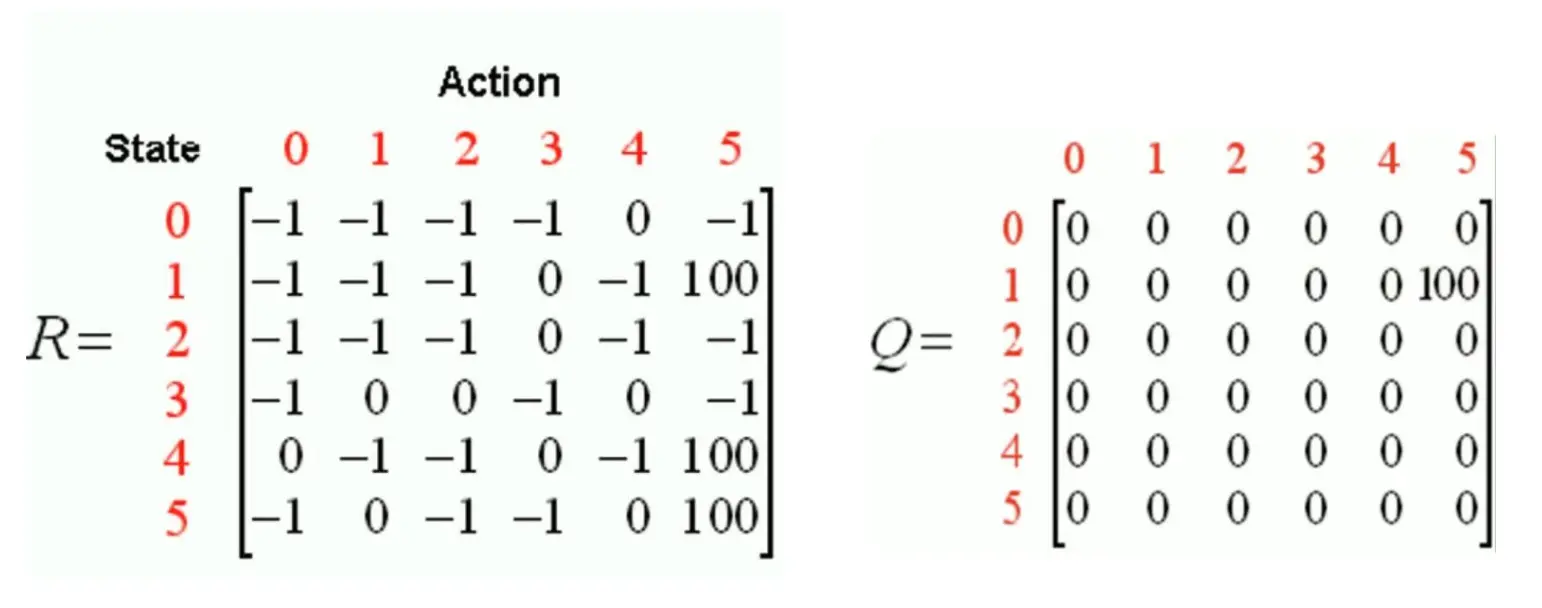 然后我们还是随机取一个起点,比如说3,能去1,2,4。比如说要去1. 那么Q(3,1) = R(3,1) + 0.8max[Q(1,3), Q(1,5)] = 0 + 0.8 * 100 = 80 更新Q表:
然后我们还是随机取一个起点,比如说3,能去1,2,4。比如说要去1. 那么Q(3,1) = R(3,1) + 0.8max[Q(1,3), Q(1,5)] = 0 + 0.8 * 100 = 80 更新Q表: 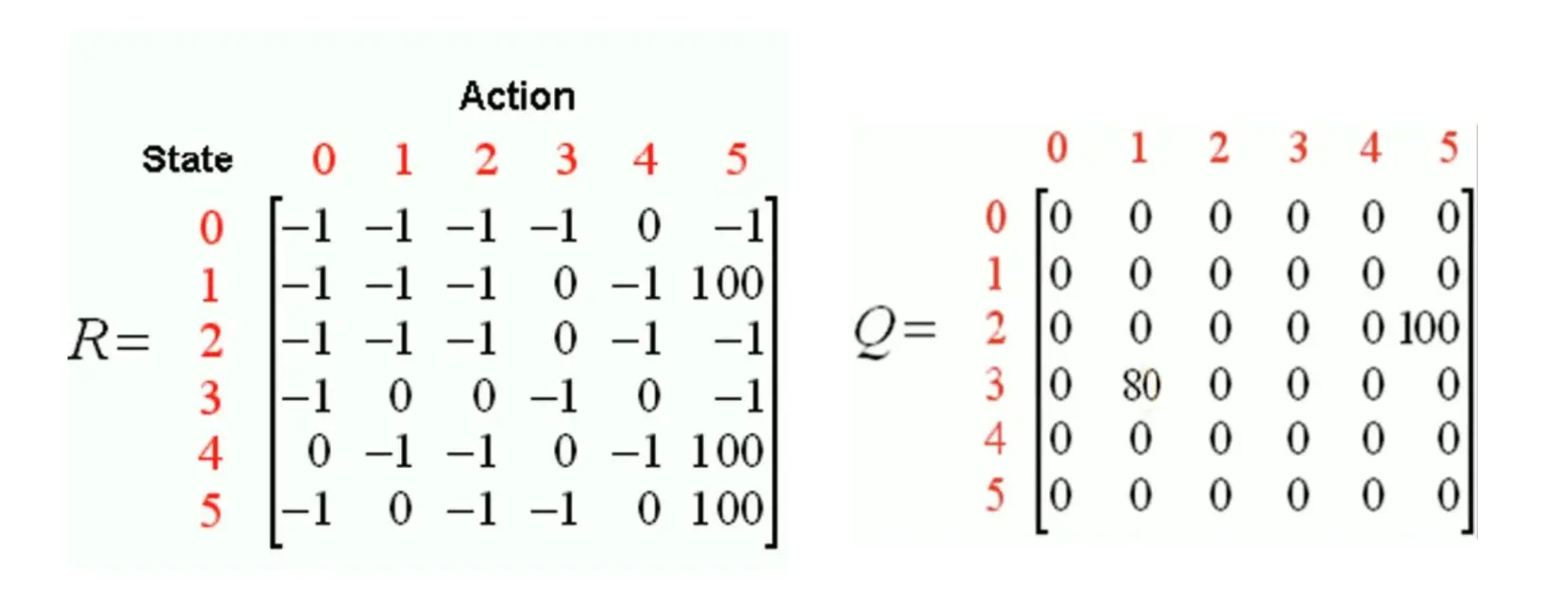 最后不断迭代,得到:
最后不断迭代,得到: 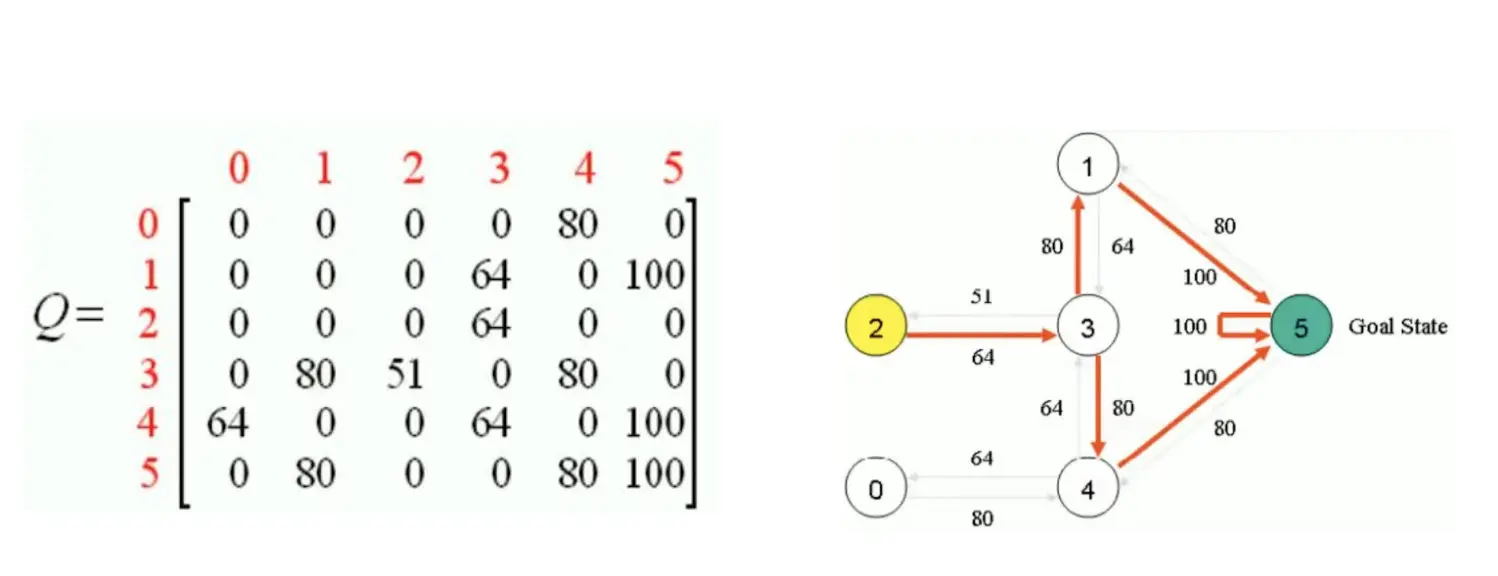
每次更新完 Q 表后,智能体的起点和动作选择可以是随机的。但是否完全随机依赖于所使用的探索策略。Q-learning 是一种 离策略(off-policy) 学习算法,因此它允许使用不同的策略来生成数据,并且不需要当前的策略来做出动作选择。
 Larry Shi
Larry Shi{kind=link}