Week 9 Markov Decision Processes
动机问题
某病症Q的患病率是1% 如果患病,那么检测为阳性的概率为90% 如果没患病,仍有9%的假阳性概率 那么结果为阳性的时候,患病的概率为多少? P(Q) = 0.01 P(阳|Q) = 0.9 P(阳|非Q) = 0.09
那么医疗建议部门应该给出什么建议呢? 这几个哪个对?
- The probability that they have disease Q is about 8%
- 错了,上面计算
- Out of 10 people with a positive test, about 9% have disease Q.
- 也不对,首先没有0.9个人
- Out of 10 people with a positive test, about 1 has Q.
- 这个就对了。如果1000人筛查,那么会有1000 * 0.01 * 0.9 + 1000 * 0.99 * 0.09 = 98, 其中9真阳,89假阳
- 其实上面已经算好概率了,就是9.2%的患病率。
- The probability that they have Q is about 1%
- 错上加错
但是上面这些都是真实人类说出来的话。所以我们知道,人在概率推理上往往表现很差,需要一个真实的场景(Natural Frequencies)才能正确表述出来。 启示:用Natural Frequencies替代概率为人们展示信息。 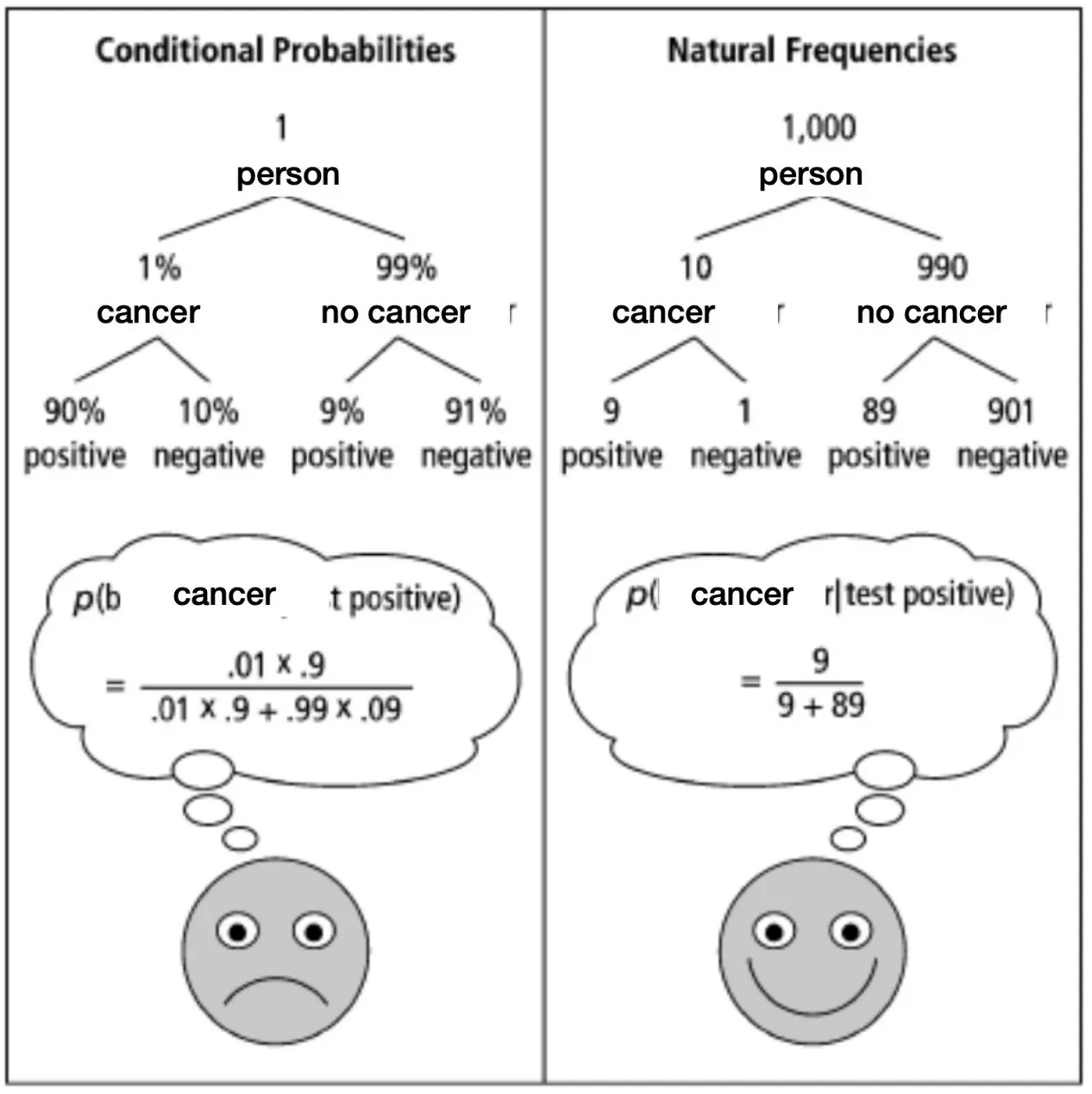
贝叶斯定理
马尔可夫链
我们曾在 11 - Language Modeling 中提到过马尔可夫过程,一阶的马尔可夫就是说忽略前置一切状态,只根据当前的状态就能预测下一状态。核心特点就是 “无后效性”(Markov 性):下一时刻的状态只依赖于当前状态,而与更久远的历史无关。状态无关。
实际上,马尔可夫链依旧是有限状态机。有一系列节点,是状态集合S,只不过,把原来确定性的状态转移方程,变成了转移概率分布P(s_new|s)。 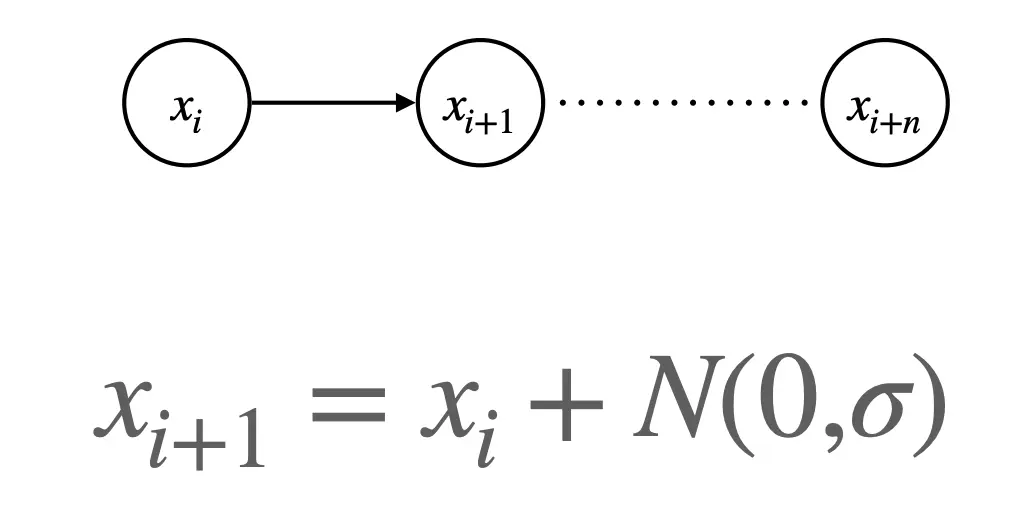 这个玩意描述了一个随机走动,或者布朗运动,每一步在当前值基础上加一个均值 0、方差sigma2的高斯噪音。下一步的增量只依赖于当前状态,符合马尔可夫性。
这个玩意描述了一个随机走动,或者布朗运动,每一步在当前值基础上加一个均值 0、方差sigma2的高斯噪音。下一步的增量只依赖于当前状态,符合马尔可夫性。 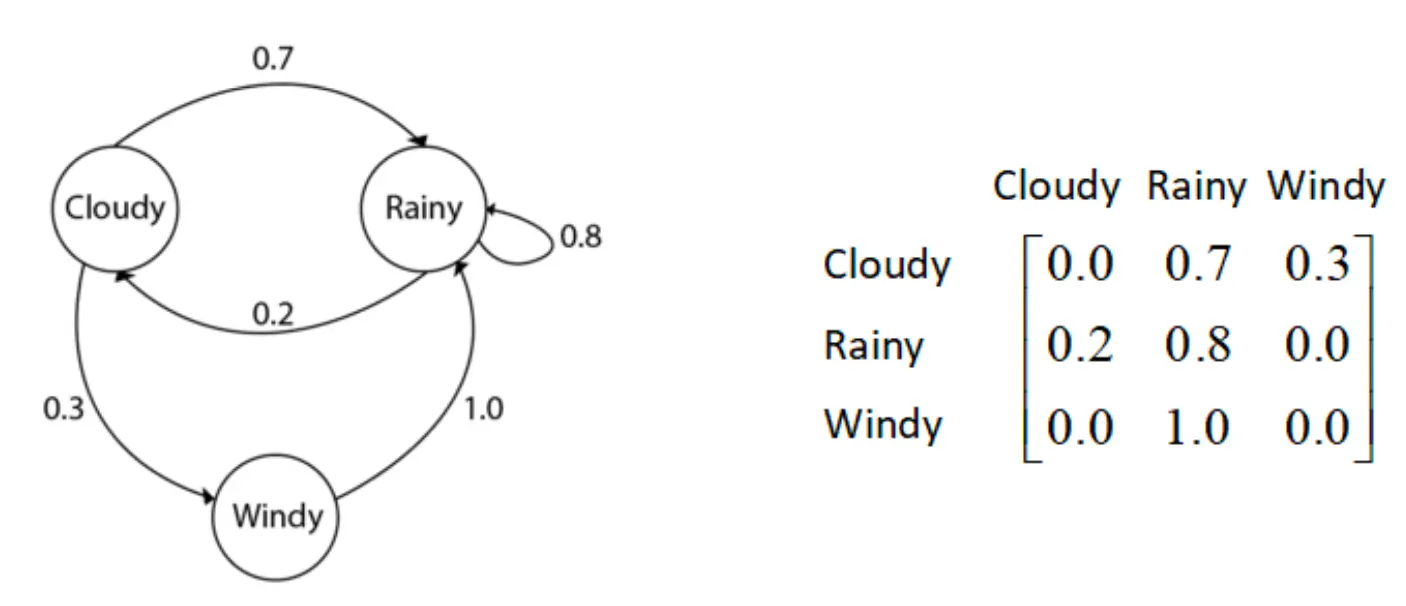 这个就很好理解,是一个气候的马尔可夫链。
这个就很好理解,是一个气候的马尔可夫链。 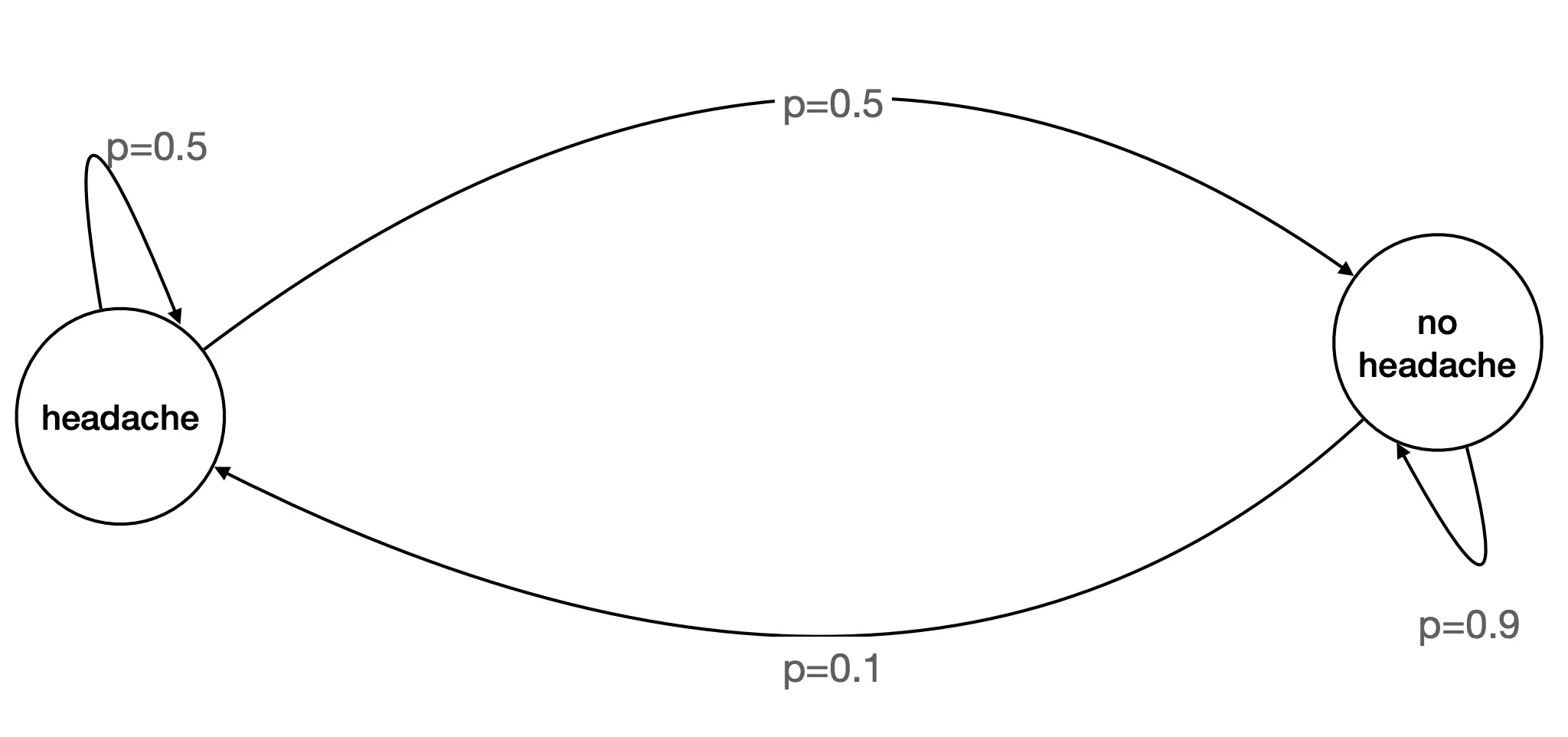 这个是一个生病头疼的马尔可夫链。
这个是一个生病头疼的马尔可夫链。 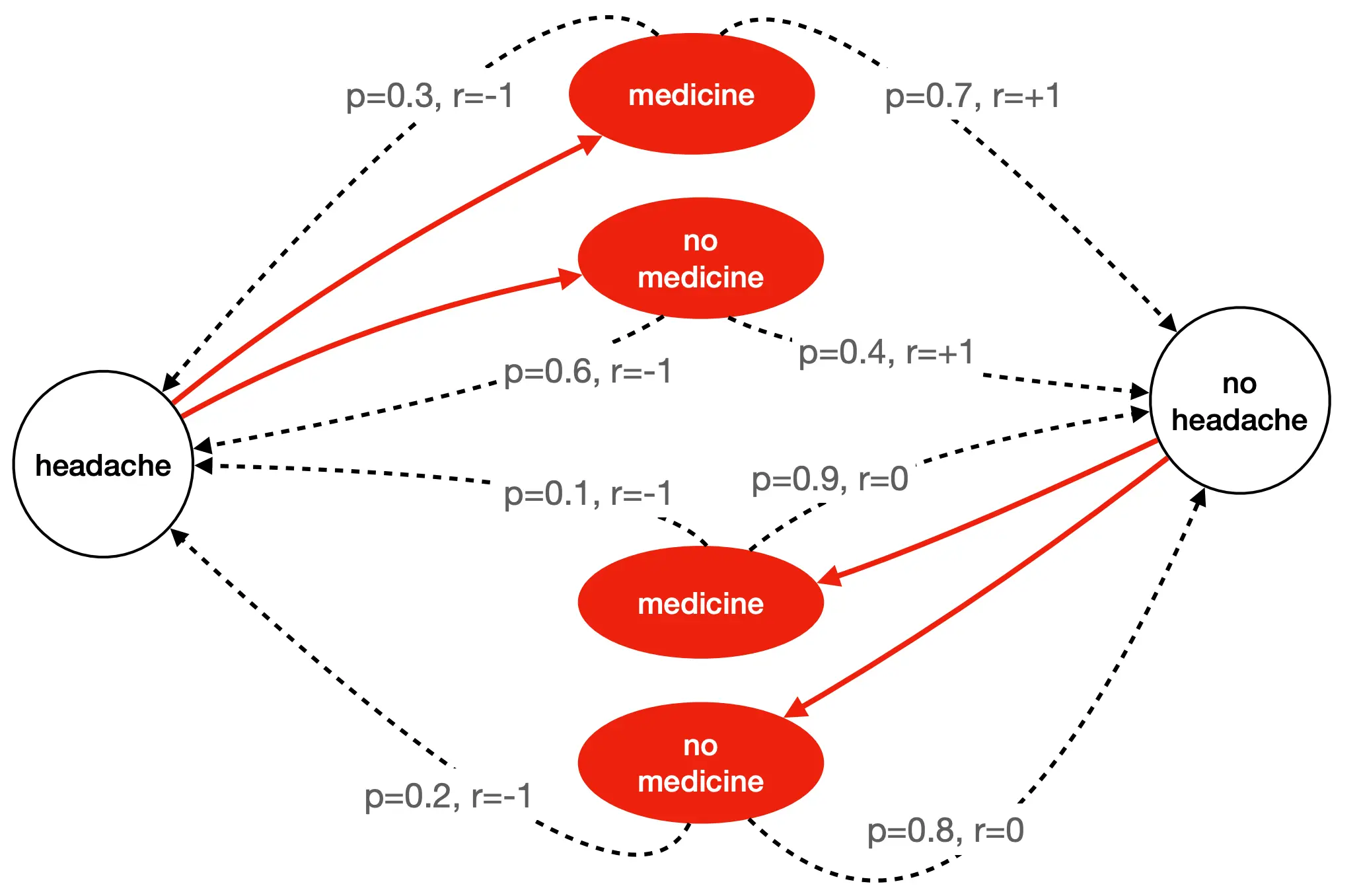 这是一个涉及Action的马尔可夫链 其中红色的是Action,动作的选择是由“策略”决定。这个图怎么看?headache的情况下,如果选择服用medicine,那么有0.7的概率获得正奖励(r = +1),变为不头疼,但是也有0.3的概率得到负奖励,也就是继续头疼或者出现副作用。如果不头疼的情况下吃药,那么0.9的概率获得0奖励,也就是继续不头疼,还有0.1的概率获得负奖励(r = -1),变为头疼。 在 MDP 中,我们要做的不只是预测状态,更要选择动作以最大化累计奖励。 𝑃 ( 𝑠 ′ ∣ 𝑠 , 𝑎 )告诉你“不同行动下会如何转移”, 𝑟 ( 𝑠 , 𝑎 , 𝑠 ′ )告诉你“这次转移值不值得”。
这是一个涉及Action的马尔可夫链 其中红色的是Action,动作的选择是由“策略”决定。这个图怎么看?headache的情况下,如果选择服用medicine,那么有0.7的概率获得正奖励(r = +1),变为不头疼,但是也有0.3的概率得到负奖励,也就是继续头疼或者出现副作用。如果不头疼的情况下吃药,那么0.9的概率获得0奖励,也就是继续不头疼,还有0.1的概率获得负奖励(r = -1),变为头疼。 在 MDP 中,我们要做的不只是预测状态,更要选择动作以最大化累计奖励。 𝑃 ( 𝑠 ′ ∣ 𝑠 , 𝑎 )告诉你“不同行动下会如何转移”, 𝑟 ( 𝑠 , 𝑎 , 𝑠 ′ )告诉你“这次转移值不值得”。
马尔可夫链的形式化定义:
- 状态集S
- 动作集A
- 转移函数 p(s_new | s, a):在s状态下采取动作a后转移到s_new的概率
- 奖励函数r = R(s'|s),转移所获得的标量奖励。
代理-环境框架
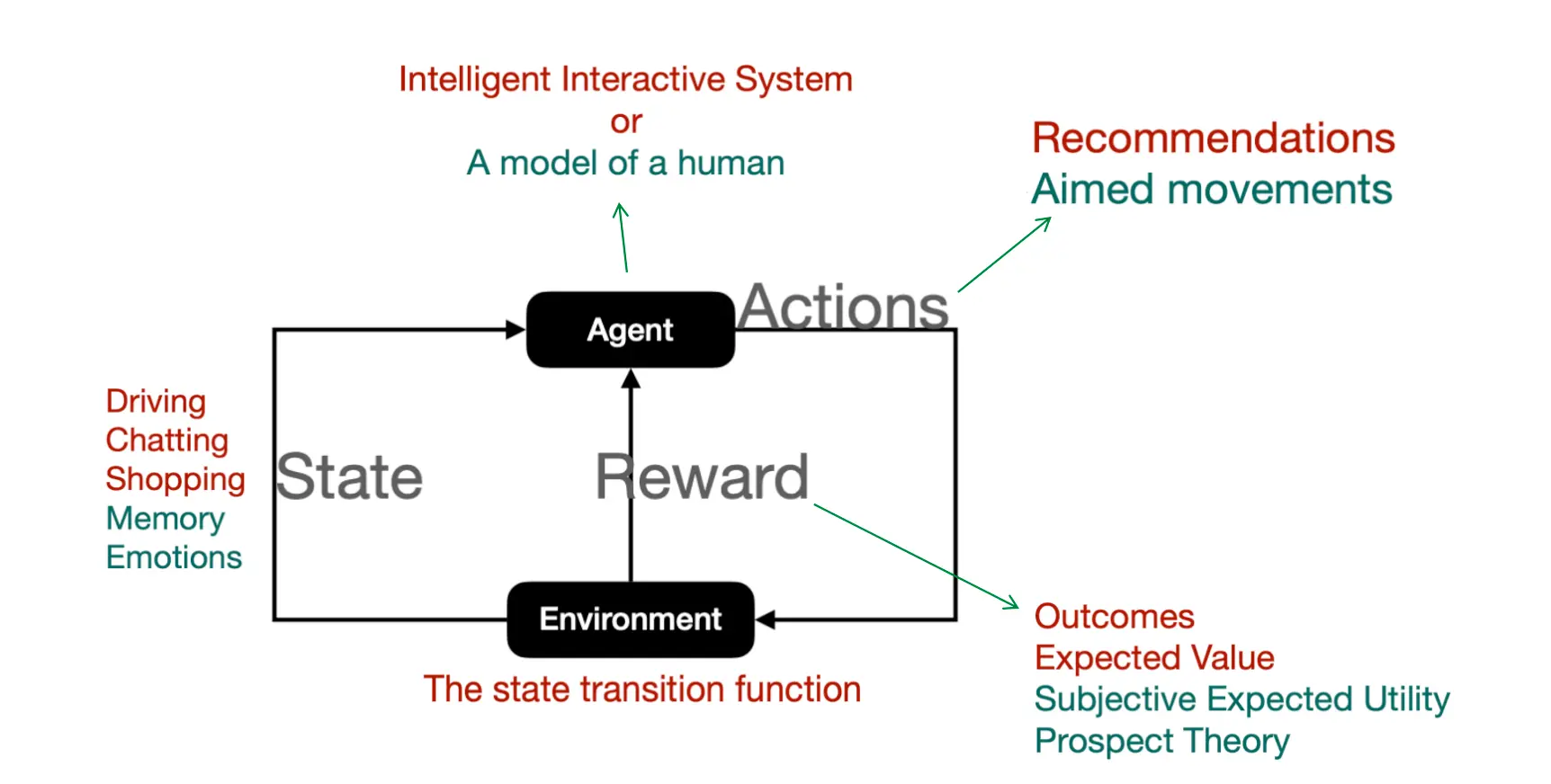 代理在上一个State的影响下选择Actions,影响新环境,得到Reward。 一个人,推荐系统在上一个state的基础上推荐采取一个action,得到新环境,以及根据主管效用 / 前景理论获得的Reward。
代理在上一个State的影响下选择Actions,影响新环境,得到Reward。 一个人,推荐系统在上一个state的基础上推荐采取一个action,得到新环境,以及根据主管效用 / 前景理论获得的Reward。
一个策略例子 - 贝尔曼方程
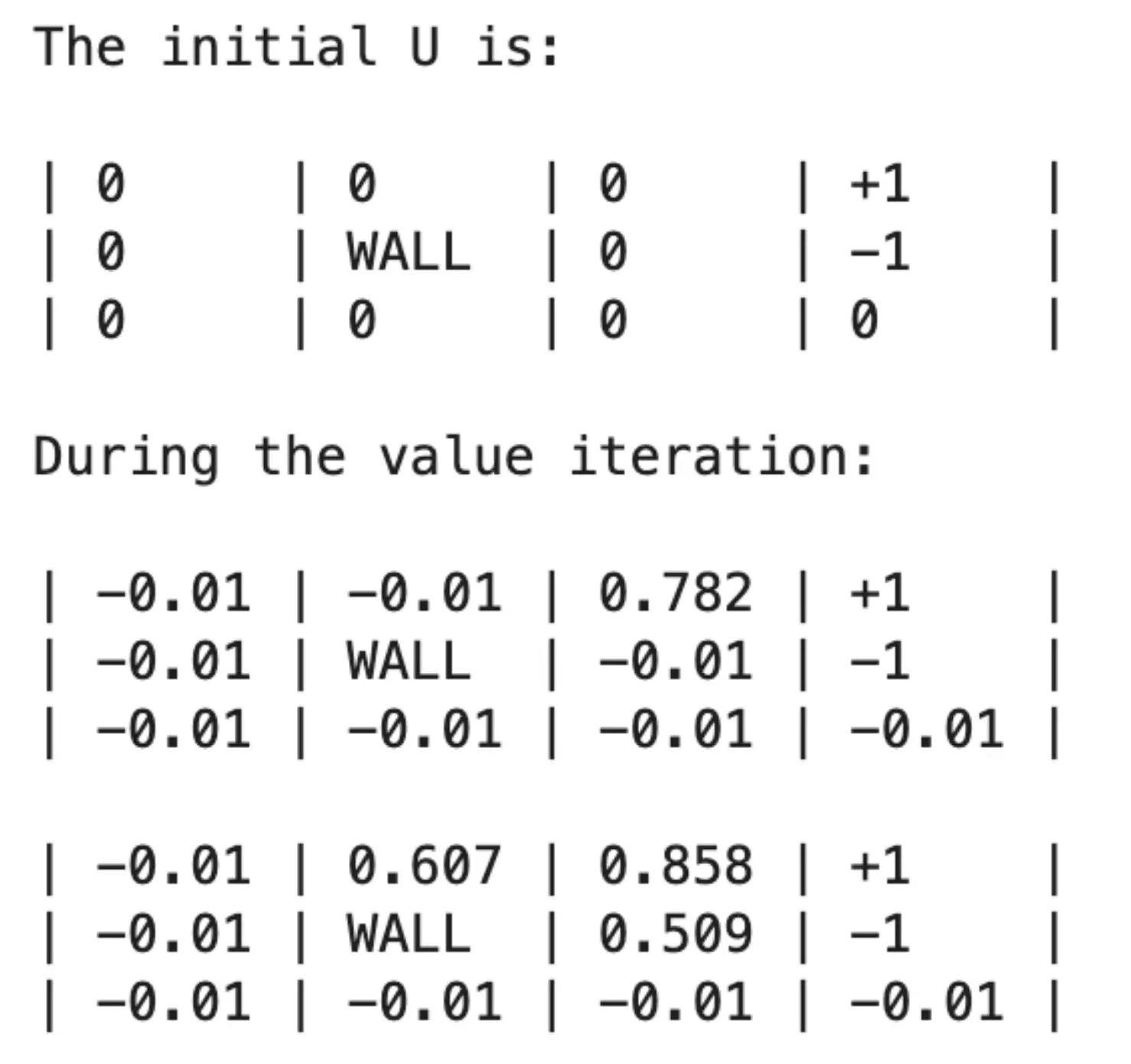
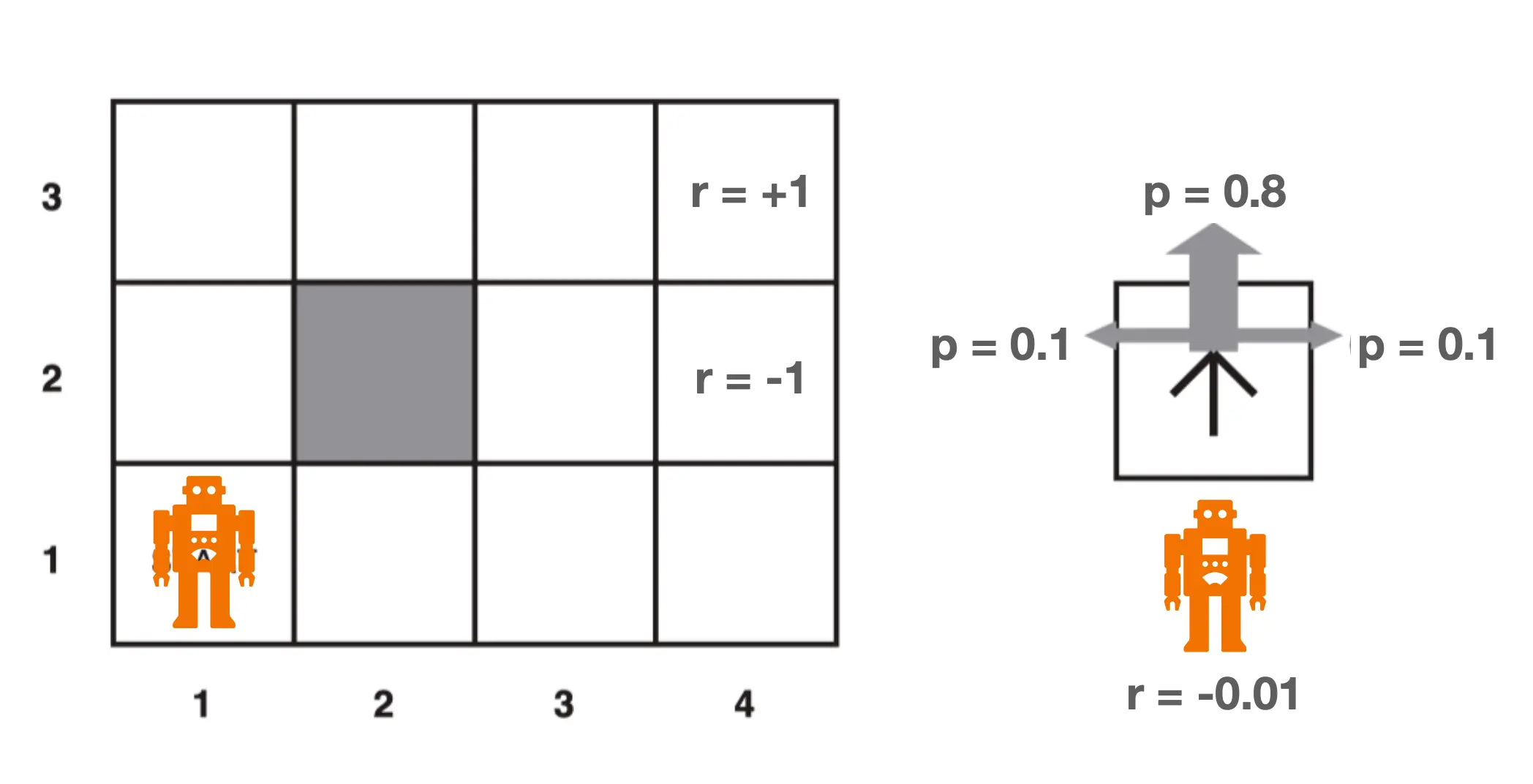 动作是随机的: 即使你指定的策略是向上,那0.8的概率朝上,但仍有10%的概率朝左朝右,这是为了模拟真实场景,比如说有风。 每跨一步 r -= 0.01
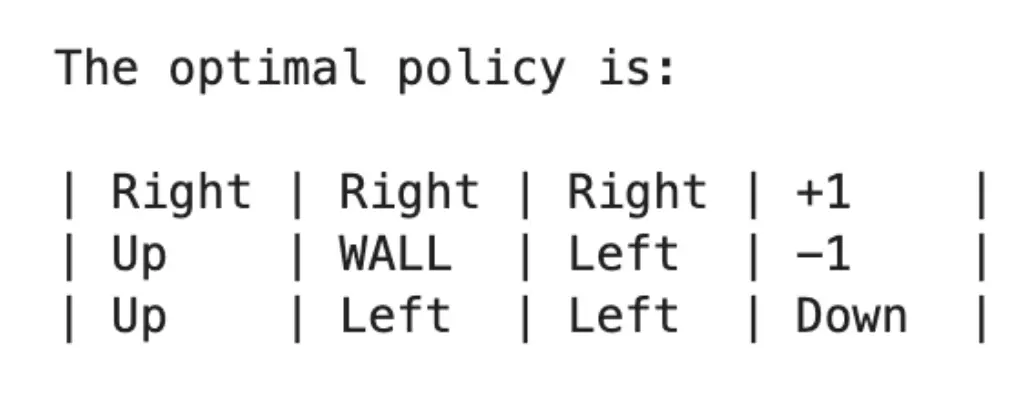
动作是随机的: 即使你指定的策略是向上,那0.8的概率朝上,但仍有10%的概率朝左朝右,这是为了模拟真实场景,比如说有风。 每跨一步 r -= 0.01 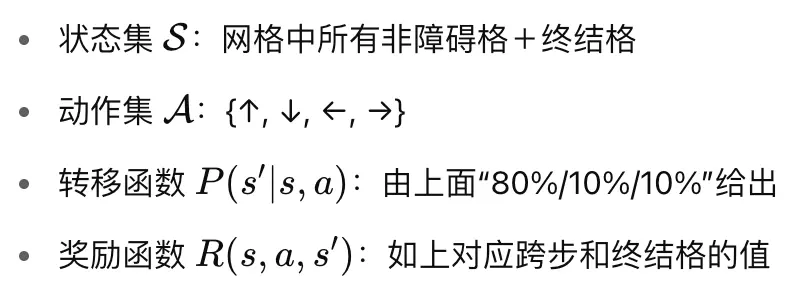 那么我们可以给出最优policy pi_star:
那么我们可以给出最优policy pi_star: 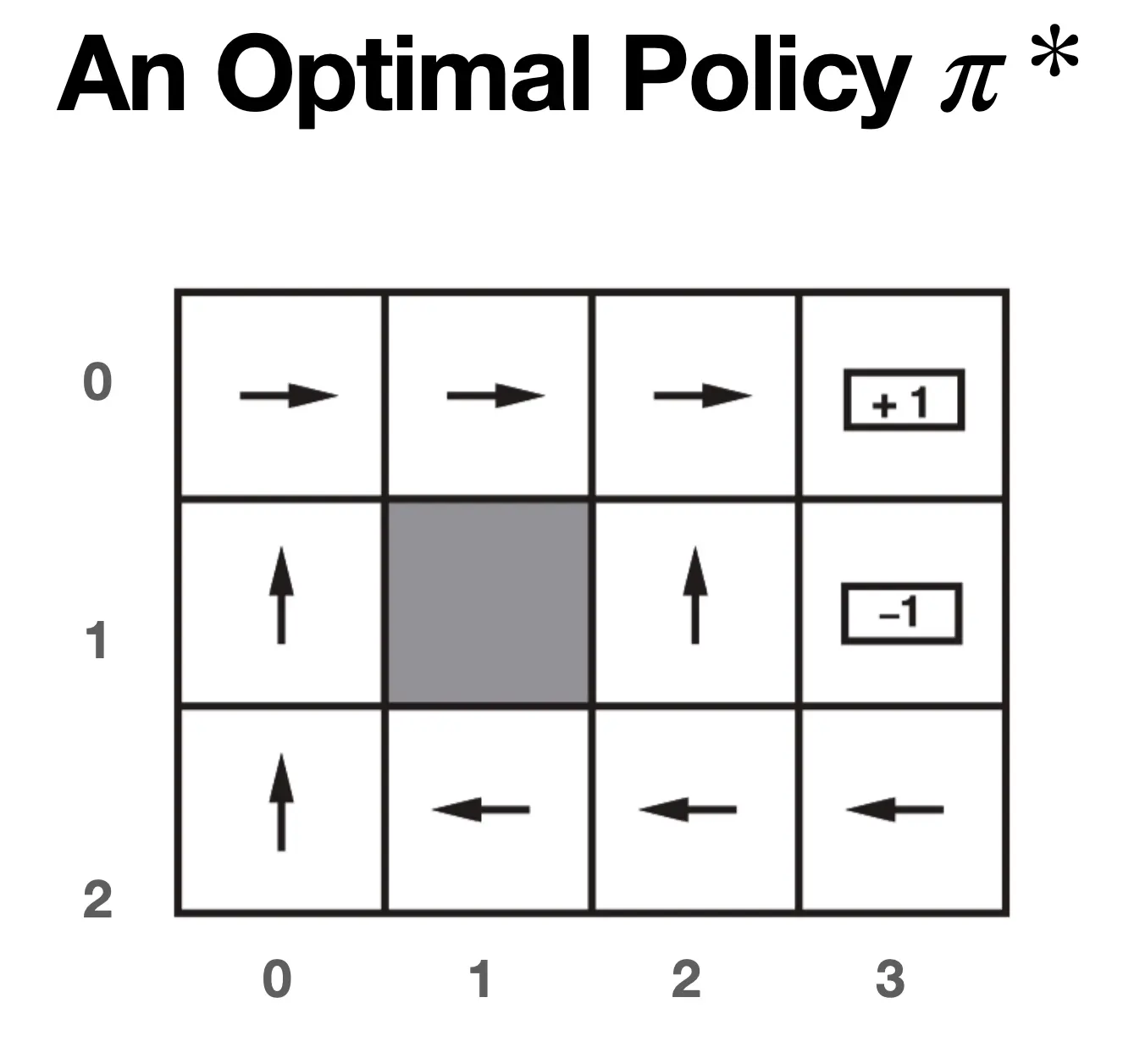 我们如何计算在最优策略π下的最优Value是多少呢?可以用最优贝尔曼方程来建模:
我们如何计算在最优策略π下的最优Value是多少呢?可以用最优贝尔曼方程来建模: 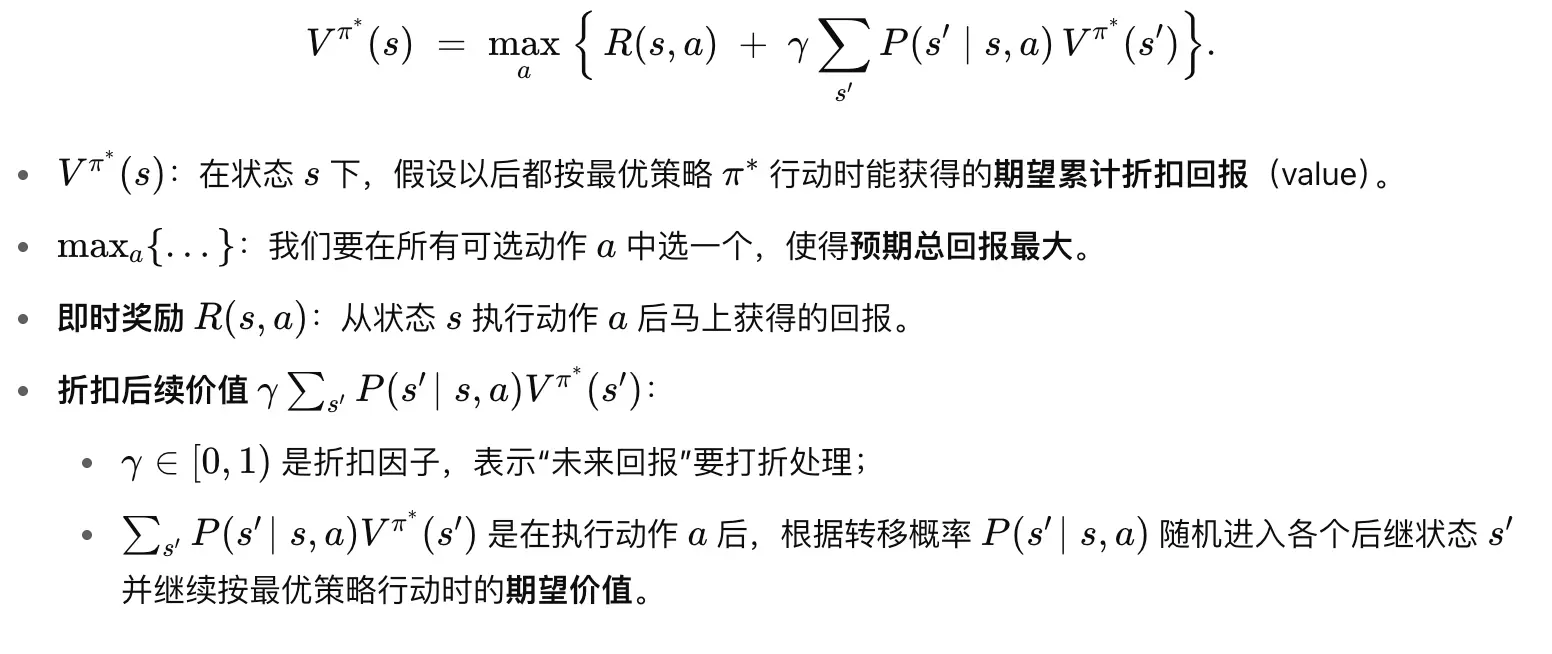 对于这个例子,就是(V和U混用了,应该用V):
对于这个例子,就是(V和U混用了,应该用V): 
确定最优策略的算法
- Value iteration :一会讲
- Policy iteration:评估阶段:给定策略pi,用贝尔曼期望方程算Vpi,改进阶段:用Vpi算出贪心策略pi_new,再回去评估,循环往复。
- Q-learning:一种经典的无模型(model-free)离线强化学习算法,通过与环境交互直接学习动作—价值函数Q(s,a), 无需事先知道状态转移方程P以及及时奖励R。
- Reinforcement Learning (RL),广义范畴,指所有通过与环境反复交互、试错学习最优策略以最大化长期累积奖励的方法。Q-learning、蒙特卡洛方法、时序差分(TD)学习、策略梯度等。
- Deep Reinforcement Learning (DRL),在强化学习框架下,用深度神经网络来近似状态值函数V(s),动作值函数Q(s,a)或策略pi(a|s),如DQN、Deep Deterministic Policy Gradient (DDPG)、A3C/A2C、PPO。
- Proximal Policy Optimisation (PPO):把「最大化期望累积回报」写成一个可微的目标函数,通过梯度上升(或近似信赖域方法)直接优化策略参数。
Value Iteration
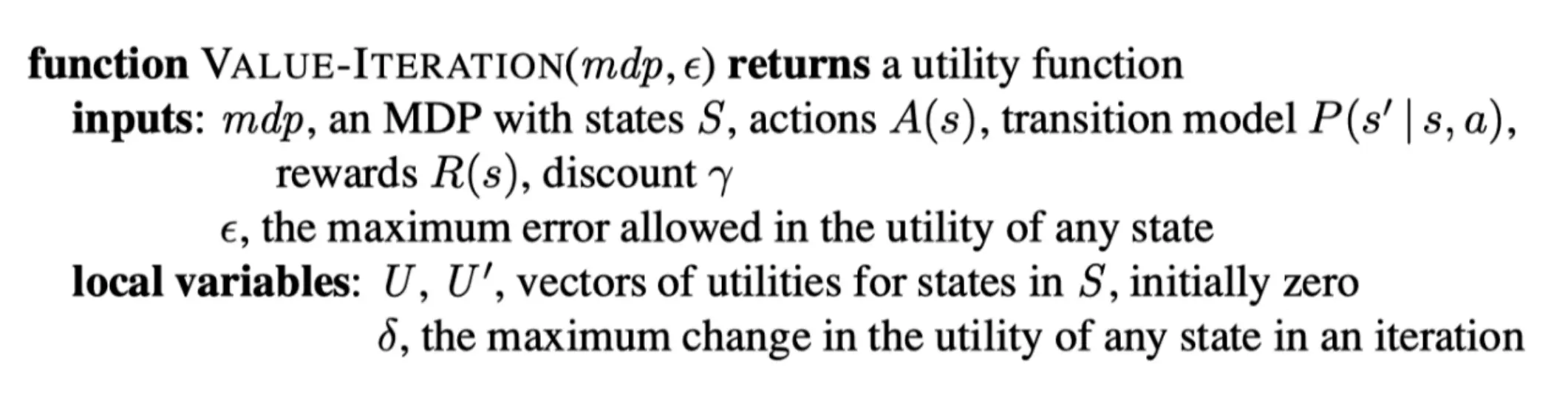 这个事Value Iteration的函数签名。 它的输入为: 常见的mdp,以及discount gamma,ε:允许的最大误差阈值,用来控制收敛条件。 本地变量:U, U', 长度为S的向量,分别存储“上一次”和“本次”对每个状态的估计效用(utility),初始都设为 0。 δ:记录每轮迭代中任意状态效用更新的最大变化量(max change)。
这个事Value Iteration的函数签名。 它的输入为: 常见的mdp,以及discount gamma,ε:允许的最大误差阈值,用来控制收敛条件。 本地变量:U, U', 长度为S的向量,分别存储“上一次”和“本次”对每个状态的估计效用(utility),初始都设为 0。 δ:记录每轮迭代中任意状态效用更新的最大变化量(max change)。
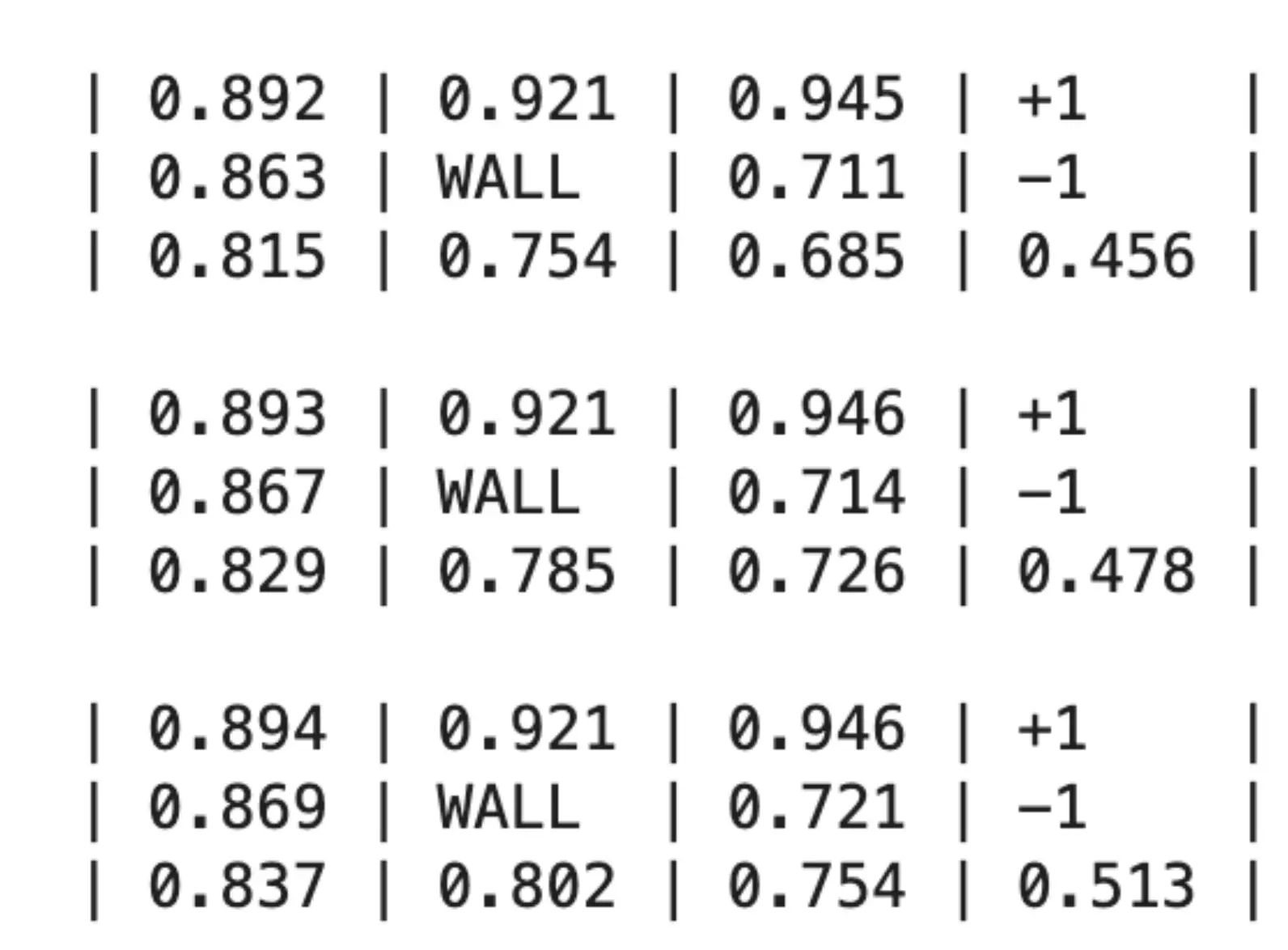
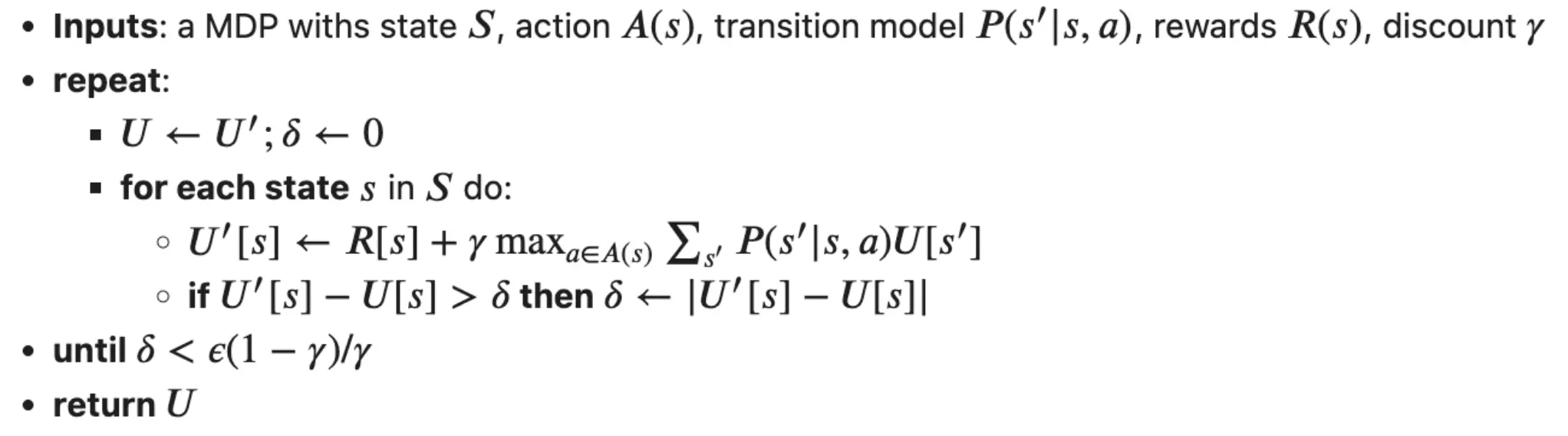 过程,先将所有格子都设为0,然后对每个点进行一次bellman 备份迭代(这并不是贝尔曼方程!不递归!):
过程,先将所有格子都设为0,然后对每个点进行一次bellman 备份迭代(这并不是贝尔曼方程!不递归!):
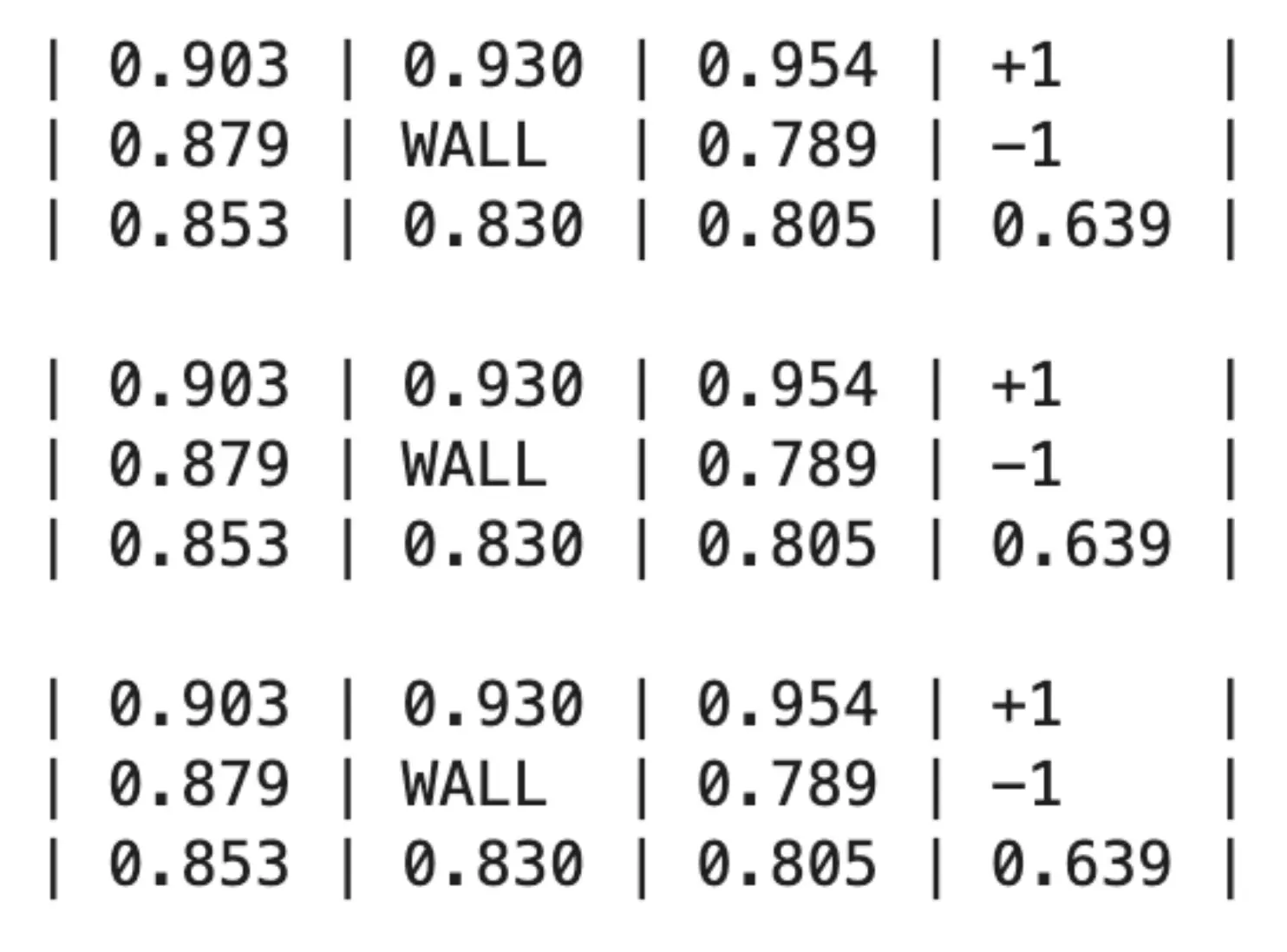
然后计算变化量 |U'(s) - U(s)|,delta,则更新若大于当前。 整轮过后,若最大变化量 δ小于收敛阈值,则循环结束。 我们是在用bellman 备份迭代,去逼近bellman最优方程!这用到了不动点定理,是一个数学证明,反正是可以逼近的。
总结
- 马尔可夫链仅仅描述了随机过程,并没有建模决策。如果要建模人类决策过程,可以用MDP。
- MDP用S,A,P,R来定义决策问题
- 动作的选择代表着意图,意图的结果可能不确定
- 贝尔曼方程通过及时奖励和未来奖励的综合来定义决策价值
- 价值迭代算法可以用来找到最优策略
- 最优策略有可能反直觉
MDP的应用
首先回顾MDP的组成:  贝尔曼方程
贝尔曼方程 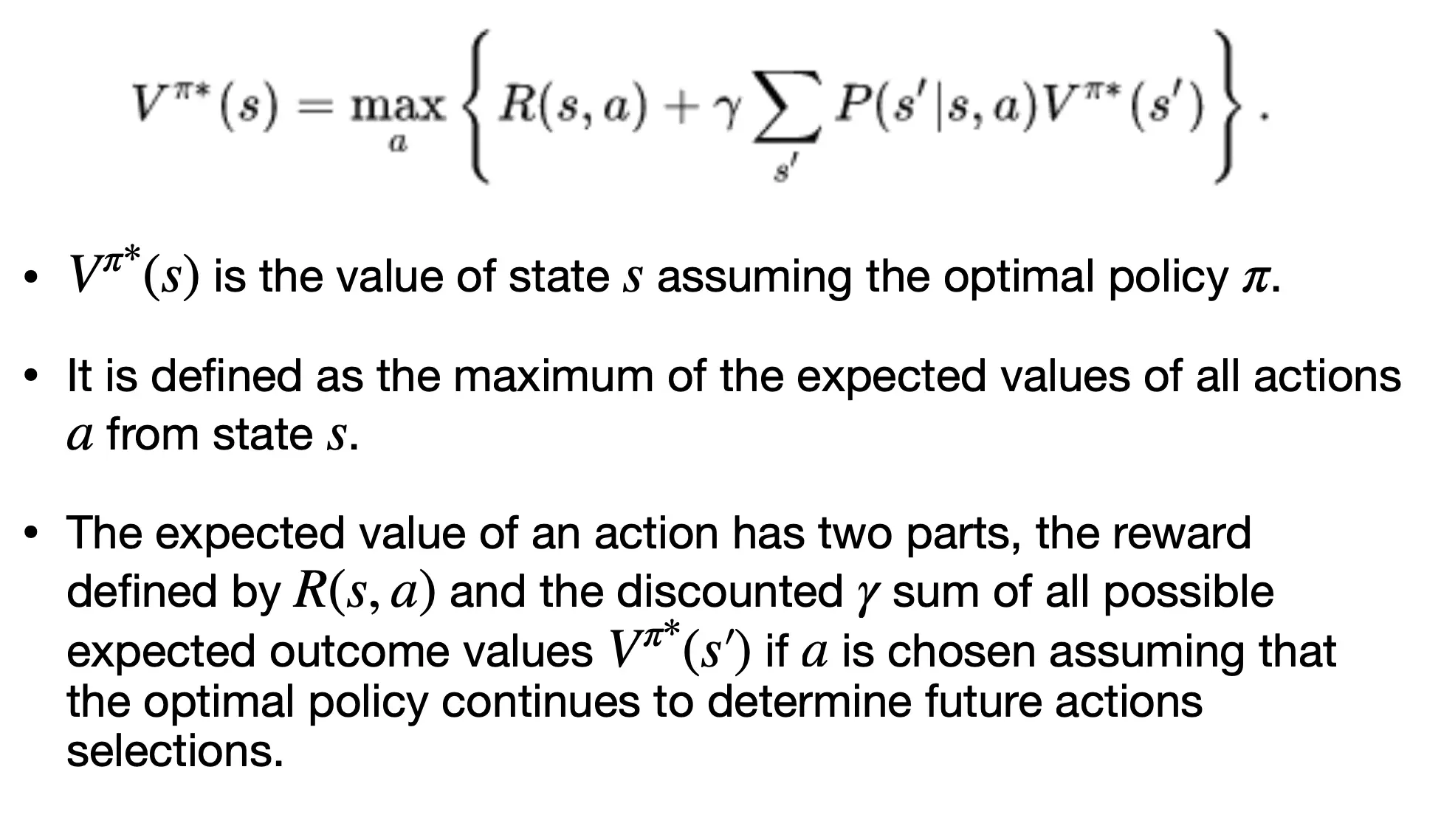
肝移植MDP
14 种不同的肝源类型,18 个病人健康状态,30 个器官质量排名级别。 如果不用MDP而用决策树,就会有18 × 14 × 30 = 7,560 个节点的决策树。 权衡: 等待带来的风险:病人可能在等待过程中病情恶化(MELD 分数 ↑)或好转(MELD 分数 ↓),也可能直接死亡。 过早接受移植带来的代价:虽然能避免“等待死亡”的风险,但术后肝脏的使用寿命有限(通常 10–20 年),而且手术风险和术后并发症也与患者当前健康状态密切相关。
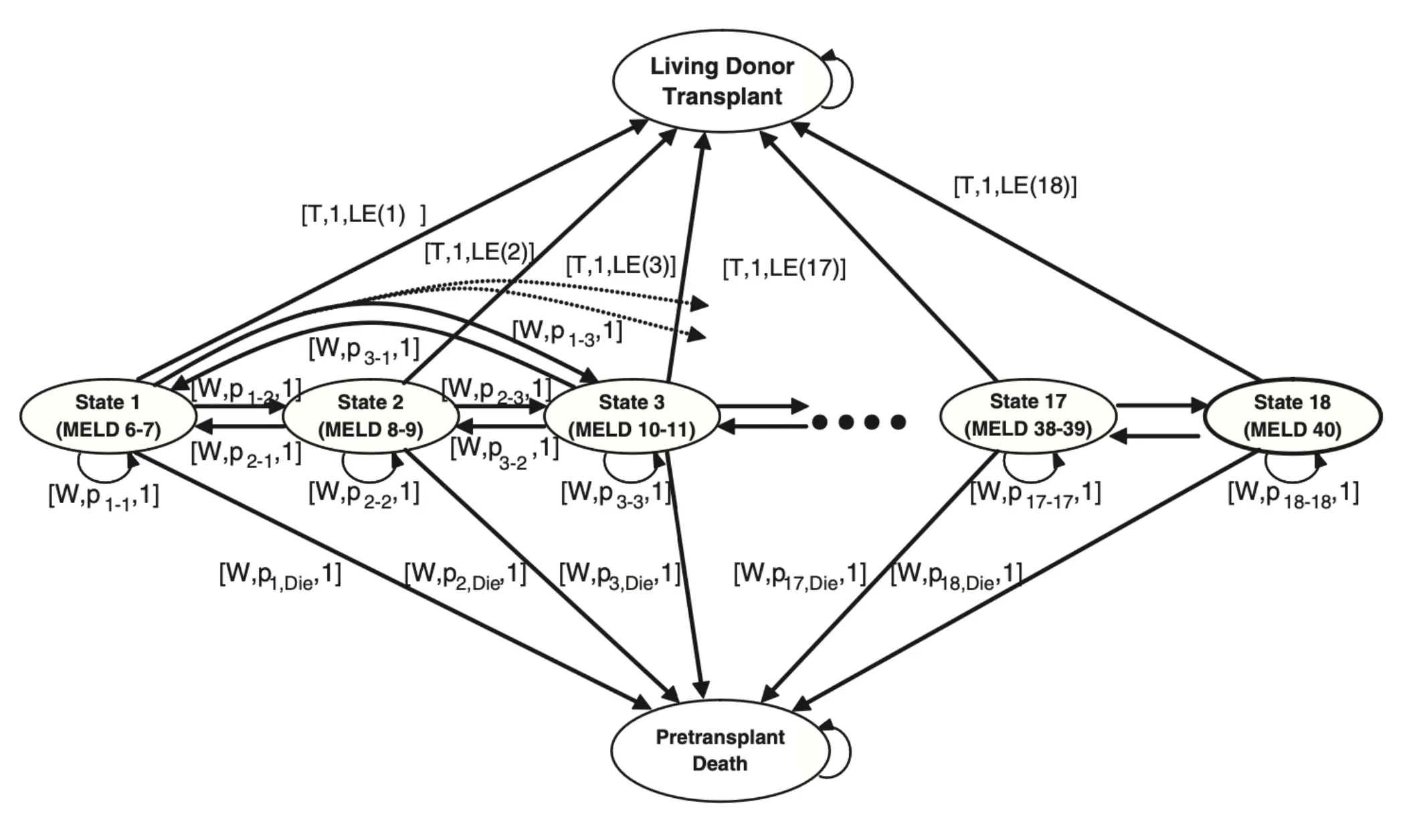 横向的是健康状态,上面是接受供肝后的状态,下面是等待过程中因病逝世的终止状态。 W是等待,T代表移植,LE代表预期寿命。每个健康状态下“等待”与“接受供肝”两条主要策略分支,以及它们各自的转移概率和获益(生存期)。
横向的是健康状态,上面是接受供肝后的状态,下面是等待过程中因病逝世的终止状态。 W是等待,T代表移植,LE代表预期寿命。每个健康状态下“等待”与“接受供肝”两条主要策略分支,以及它们各自的转移概率和获益(生存期)。
糖尿病MDP
对于状态空间,里面有:
分别为:慢性并发症,急性并发症,严重风险标志,已确诊糖尿病年份,等。
对于行为空间,里面有:  对于状态转移函数,这是由真实数据决定的。清洗后 69 000 名真实患者的年度随访轨迹,之后进行了归一化。
对于状态转移函数,这是由真实数据决定的。清洗后 69 000 名真实患者的年度随访轨迹,之后进行了归一化。
对于Reward,采用了QALY(质量调整生命年),每年获得的健康效用减去用药成本 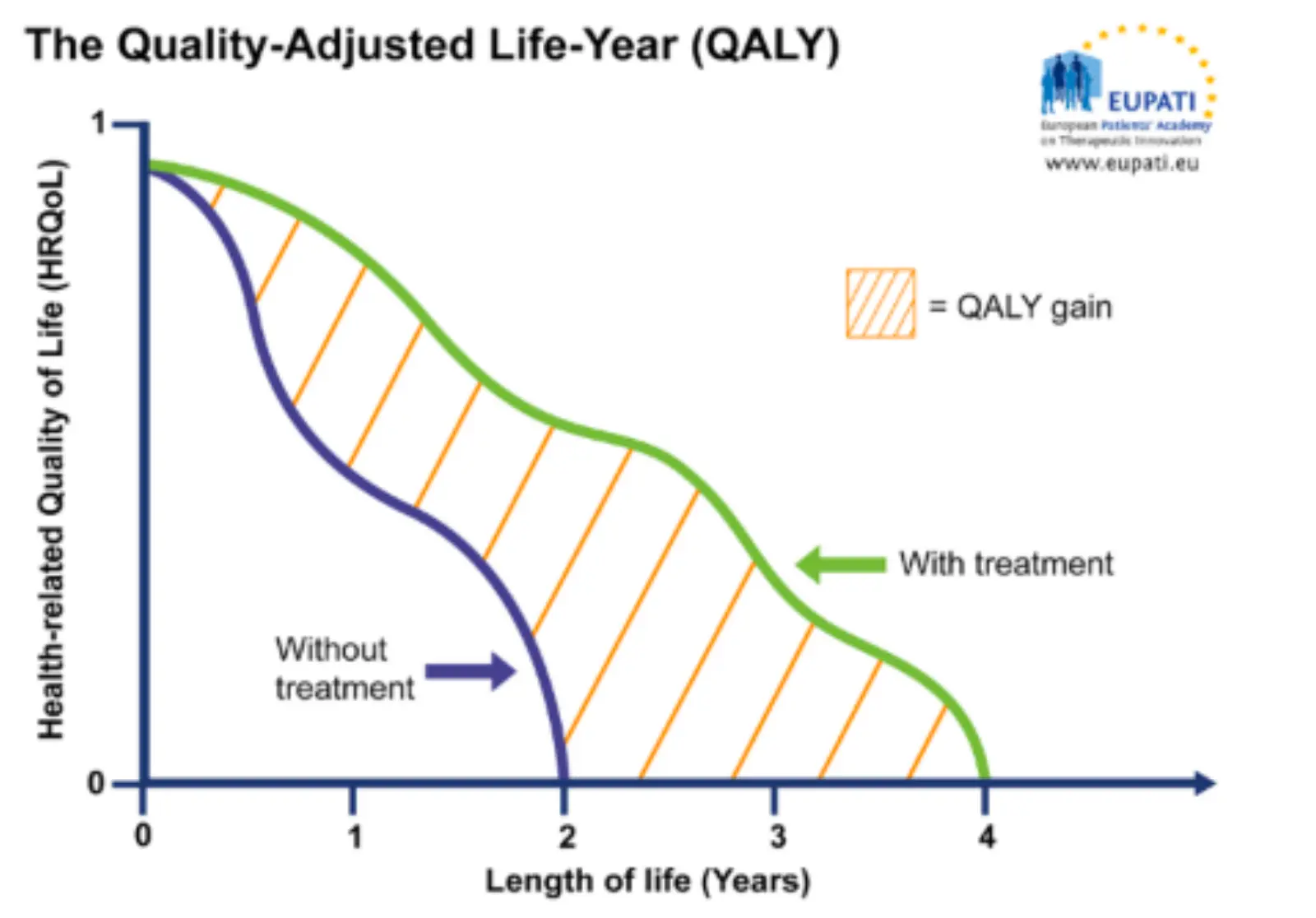
前半项:折算后的 QALY(考虑四类健康折减)× 社会支付意愿,后半项:该药物组合的直接成本 + 副作用等额外损失。
结果: 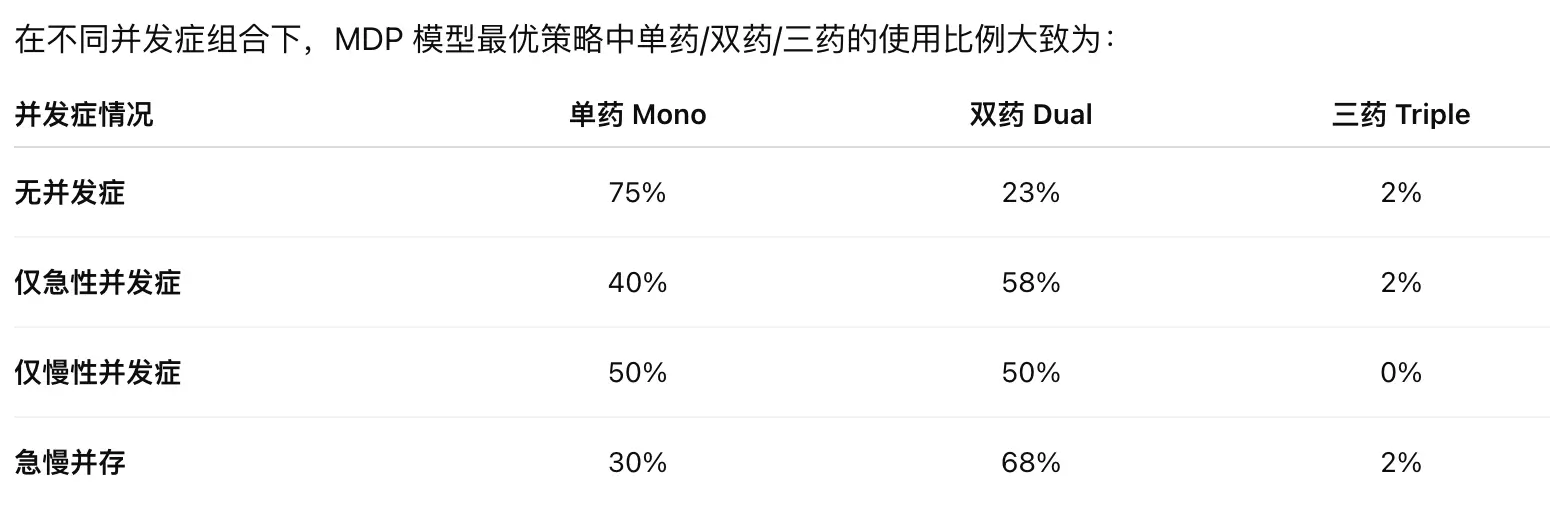
情景感知MDP
情境感知(Situation Awareness, SA)各种因素如何共同作用,影响飞行机组(Crew)的决策和操作(Crew Actions)。有各种各样的影响。 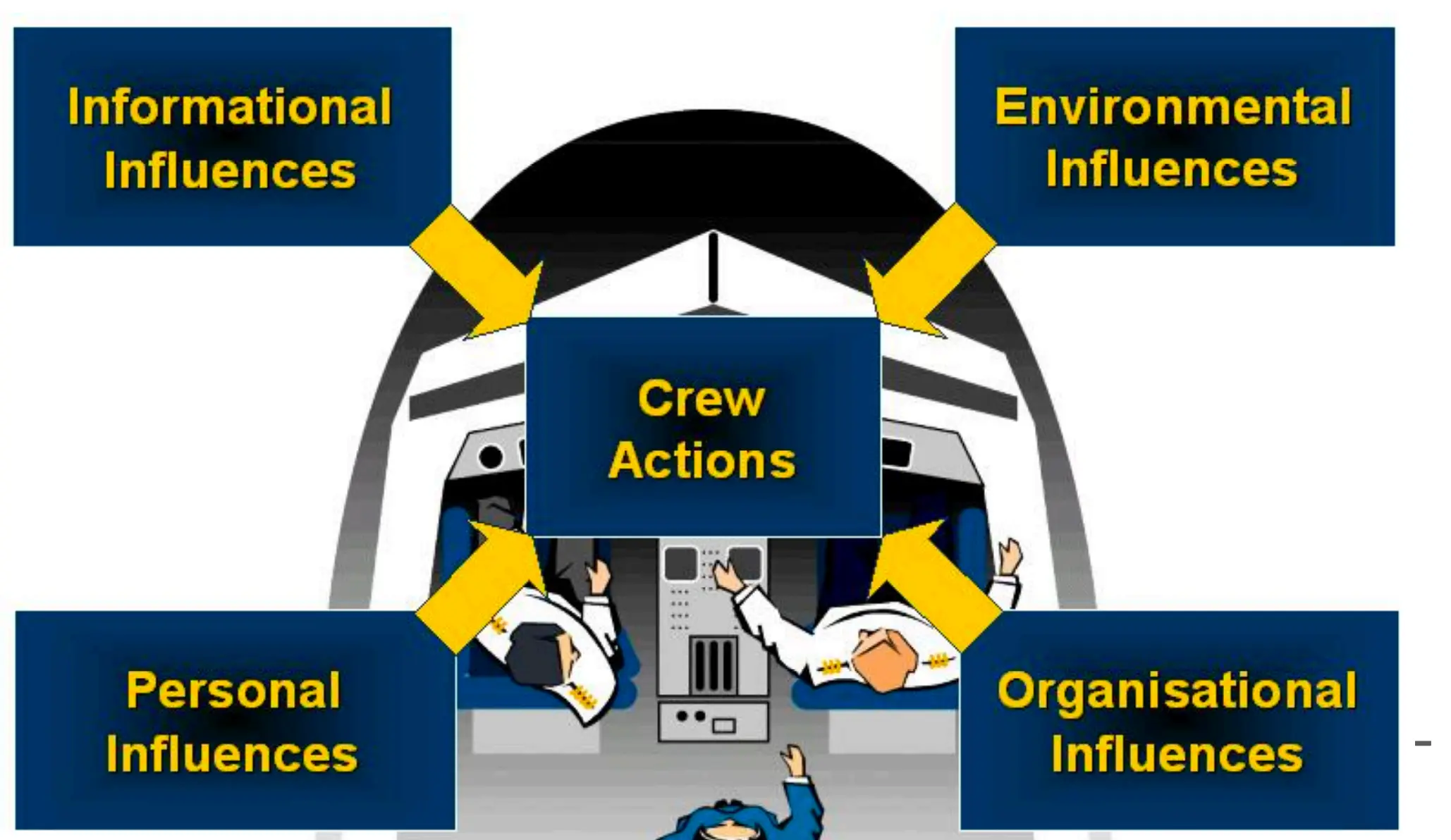 飞行员飞行中必须保持情境意识的关键要素:
飞行员飞行中必须保持情境意识的关键要素:
- 飞行状态(Status),包括飞机的空速、飞行高度、航向、燃油剩余量
- 地形(Terrain)
- 天气(Weather)
- 空中交通(Air Traffic)
- 导航(Navigation)
- 飞行计划,人为因素,飞机和机组能力(Aircraft and crew capabilities)
传统中,飞行员根据眼动来维持情景意识,优秀机师通过合理分配注视时间和扫描路径,来不断地从多个视野(外部与多套仪表)中收集信息,从而维持高水平的情境意识。 
 我们希望有一个模型,预测最佳的眼动模式,帮飞行员维持高的情景意识,用于飞行员的训练,以及飞机设计等。 我们希望用MDP建模,有两个假设:
我们希望有一个模型,预测最佳的眼动模式,帮飞行员维持高的情景意识,用于飞行员的训练,以及飞机设计等。 我们希望用MDP建模,有两个假设:
- 假设 1:眼动是一个不确定环境下的多阶段决策过程
- 假设 2:有经验的操作者会遵循“最优策略”规划眼动序列 核心概念:
- AOI(Area Of Interest,兴趣区):驾驶舱内被划分出的若干功能区/注视区,例如,飞行显示器(PFD),多功能显示器(MFD),油门杆与发动机状态指示区。
- Fixations(注视)
- Value of an AOI(AOI 的价值),该 AOI 在当前时间点对完成整体子任务(Subtask)的 情境感知收益:比如从 PFD 上读取空速能帮助维持高度控制,从外部视野观察跑道能辅助进近判断。
- Subtasks(子任务):飞行过程可拆分为若干具体操作目标,如,Check speed:监控与保持目标空速,Check heading:确认与修正航向。
- Relevance of AOIs to Subtasks(AOI 与子任务的关联度),不同 AOI 对不同子任务的重要性是不同的,对“Check speed”而言,PFD 上的空速表高度相关(高关联度),对“Answer ATC”而言,外部视野或听觉类 AOI(如抬头听话筒)更关键。模型里用 关联矩阵 或 概率权重 来量化。
- Bandwidth BW of each AOI(兴趣区带宽),类比通信系统的带宽,指从该 AOI 中接收新信息的“速率”或“容量”。带宽高的 AOI(如电子地图、雷达)能快速提供大量动态信息;带宽低的 AOI(如指针仪表)信息更新较慢。
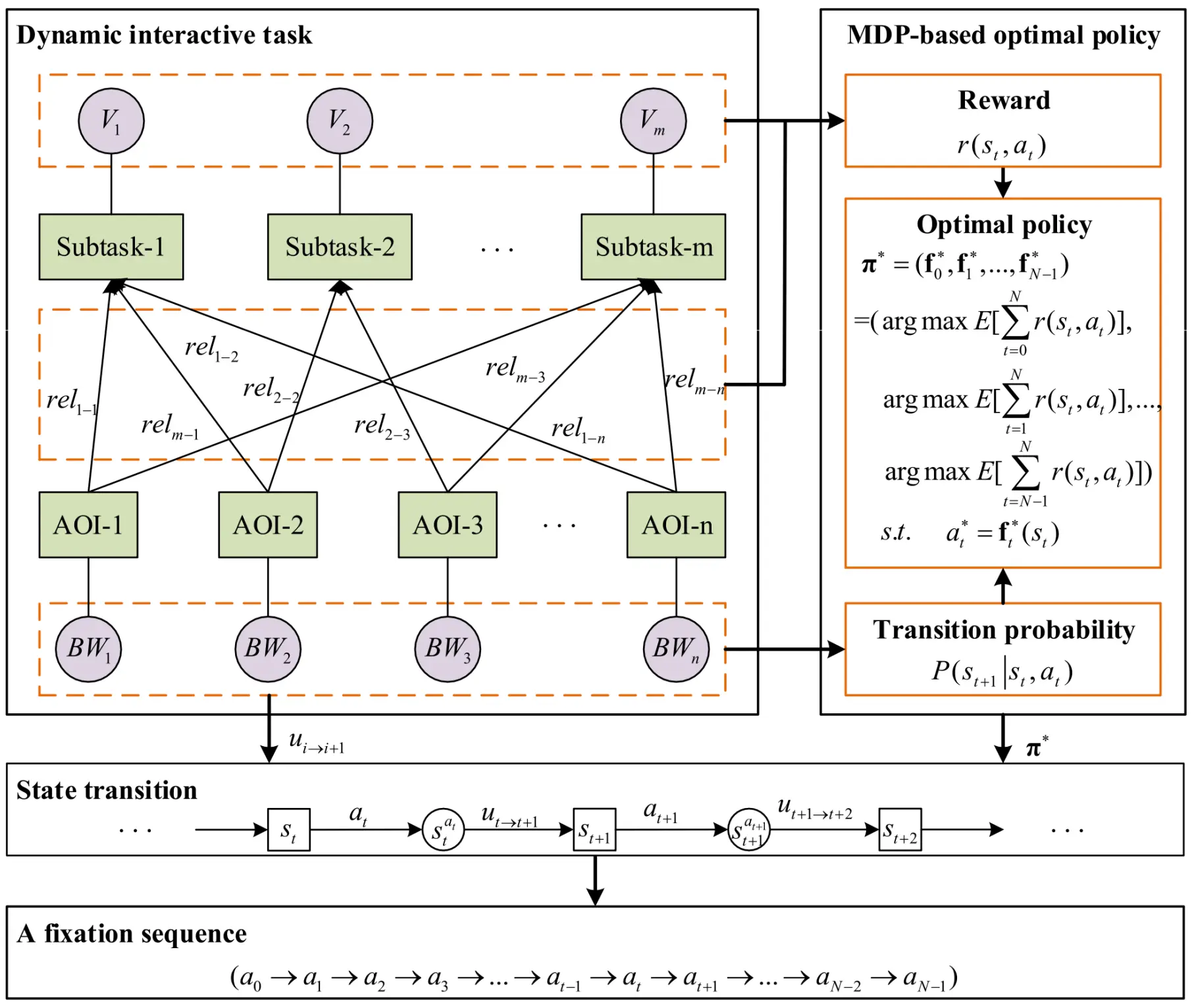 Subtask子任务,V是其对应的AOI价值,Subtask被拆解为不同AOI的关联度,而不同AOI有着不同的带宽。 当视线从一个 AOI 转向下一个 AOI 时(动作 aₜ),各 AOI 会根据其带宽产生随机的信息更新量 u。
Subtask子任务,V是其对应的AOI价值,Subtask被拆解为不同AOI的关联度,而不同AOI有着不同的带宽。 当视线从一个 AOI 转向下一个 AOI 时(动作 aₜ),各 AOI 会根据其带宽产生随机的信息更新量 u。 - 状态 State:包括当前注视所在的 AOI、各子任务未满足的信息量,以及各 AOI 最新的可用信息不确定度。
- 动作 Action:在时刻 t,选择将视线转移到哪一个 AOI 并进行一次注视(fixation)。
- 转移概率 P(sₜ₊₁ | sₜ, aₜ):给定当前状态和注视动作,不同 AOI 的带宽决定了注视后信息更新的随机分布,从而使系统转移到下一个状态。
- 奖励 Reward r(sₜ, aₜ):定义为一次注视带来的 SA(情境意识)增益。 工作流:
- 定义 MDP
- 求解最优策略 π*
- 用 π* 和信息更新函数 u 生成序列。信息更新函数 u 描述了当视线从一个 AOI 转到下一个 AOI 时,每个 AOI 中的信息不确定度如何按其带宽 BW 随机变化。按照 π* 给出的动作选择,从初始状态出发,迭代地应用 “选动作→注视→信息更新”,即可得到一系列状态 s₀→s₁→…→sₙ 以及对应的注视序列 a₀→a₁→…→aₙ。
- 状态 s 对应的 SA 水平。在任一时刻,状态 s(包含了对各 AOI 信息的掌握与否)就可以视作被试(操作员)对当前情境的整体感知程度。
- 状态的向量表示,将状态写成二元向量形式:
这里 n 是 AOI 的总数,每个分量 i_k 表示对第 k 个 AOI 信息的“知觉”情况。ik是二值化的,iₖ = 0:表示对第 k 个 AOI 中必要信息未获得(“unconscious”),即该区域的信息不确定度仍存在。iₖ = 1:表示对第 k 个 AOI 中必要信息已获得(“conscious”),该区域在当前时刻的信息需求被满足。
奖励:把飞行任务的重要性映射到奖励函数里。
- 任务价值(Value of a task),每个子任务(Sub-task)都有一个“先天价值”或“固有重要性”ViV_iVi,用来度量该子任务对整体安全/成功的贡献。比如“保持飞行姿态”比“调节客舱温度”更重要,所以前者的价值 VVV 应该更大。
- 子任务重要性层级(Importance hierarchy)不同子任务并不是平级的,而是存在“优先级顺序”——我们把更重要的任务放在奖励函数里权重更高的位置。
- 航空领域的 ANCS 层级:在飞行操作里,通常采用一个公认的任务优先级框架——ANCS。
- 其他领域的类比:车道保持(lane keeping) 和 道路危害检测(hazard detection) 的重要性高于导航设定(setting GPS) 或 车内娱乐系统操作。奖励函数同样要根据这些领域特有的优先级来分配注视收益。
MDP思考问题
MDP被视为推荐系统,优势和劣势是什么?
优点:
- 建模长期影响。能考虑状态转移和长期奖励,不像传统推荐系统仅基于用户当前偏好。
- 提供解释性(Explainability):比协同过滤好。
- 可以学习最优策略(Learn optimal policies)
- 用于复杂决策场景
缺点:
- 模型复杂度高:状态数可能达到数千或上万,计算优化困难。
- 奖励函数设计困难
- 数据需求极高:即使有数千万条原始数据,能清洗出来用于建模的可能只剩几万条
- 对人的非理性行为不敏感
其他风险:
- 伦理风险:用 MDP 推荐高风险治疗(如手术、化疗)时,缺乏人类参与可能引发信任危机。
- 责任归属模糊:如果算法建议出现问题,责任落在医生、系统设计者还是机构?
- 低质量数据带来误导:特别是在 NLP 清洗医疗文本等场景,错误或歧义可能导致推荐偏差。
MDP如何用于半自动驾驶?
- 划分汽车驾驶舱的AOI
- 定义子任务与关联度,划分层级
- MDP建模:
- 状态 sss:当前注视所在AOI + 各子任务信息“已知/未知”(用二值向量表示)
- 动作:转移AOI
- 转移概率:基于各AOI的“带宽”,模拟不同视线停留后获得信息量的随机性
- 奖励:每次注视带来的“情境感知增益”,并按子任务优先级(如车道保持>前车距离>导航设定)加权。
还可以:
- 注意力监测与干预:系统实时评估司机当前注视模式与最优策略的偏差,若偏离过大(如长时间只盯屏幕),则发出语音或振动提醒,防止“监控疲劳”
- 自适应显示:当系统检测到司机对某些AOI获取信息不足时,可临时高亮HUD或语音播报关键信息(如车距、盲区来车)
- 培训与评价:通过比较新手/老手司机的注视策略与MDP最优策略,量化驾驶训练效果,并调整模拟器场景
其他场景: 其他领域如医疗、交通管制、工业监控等,也都存在“多源信息→多子任务→有限注意力”这一共性,均能通过SA-MDP模型设计“最优注视/监控策略”,提升整体情境感知与决策效率。
 Larry Shi
Larry Shi